Устройство для программного управления приводом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
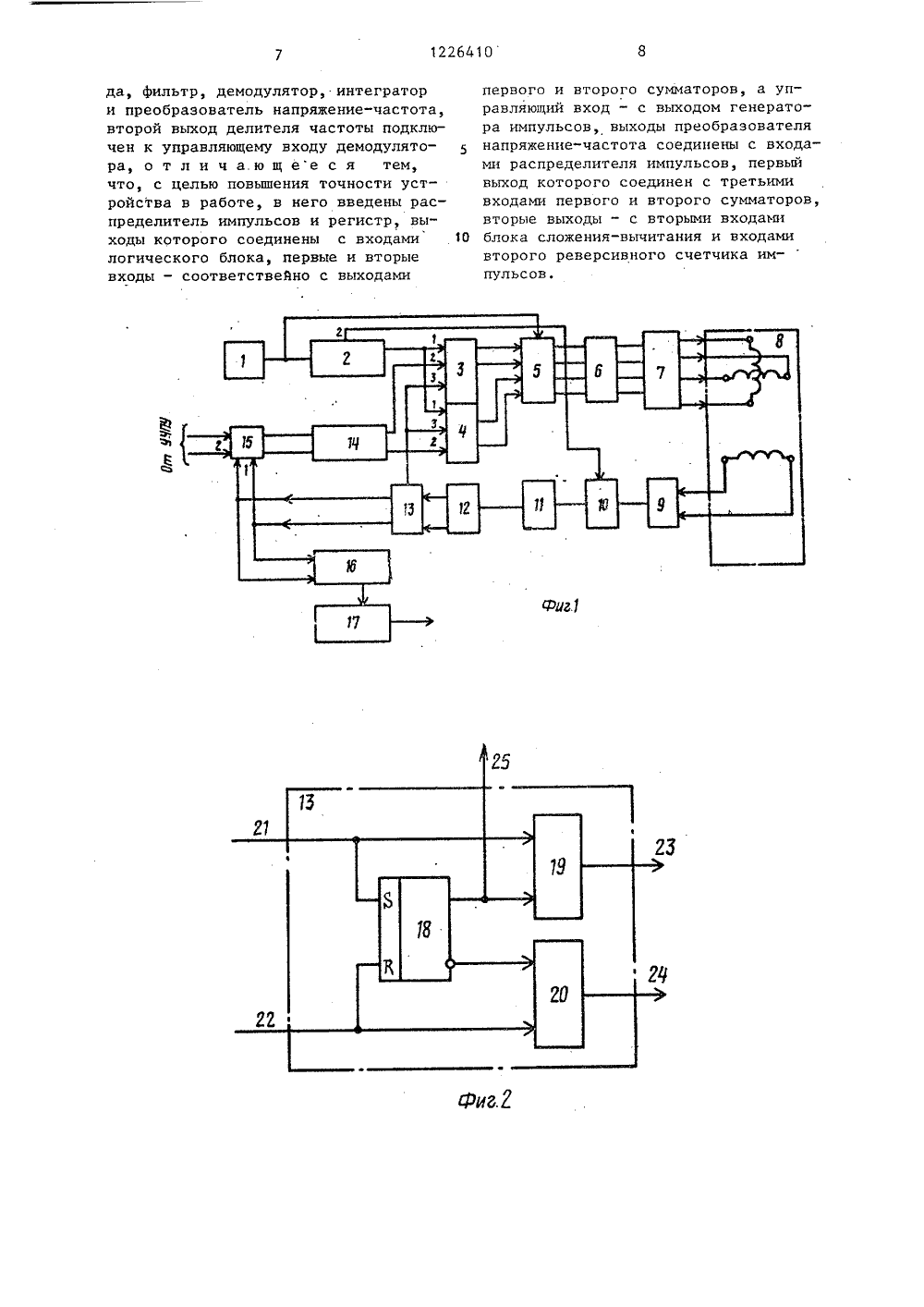
СОЮЗ СО 8 ЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК С 05 В 19/18 ОПИСАНИЕ ИЗОБРЕТЕНИЯ"К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДОМ(57) Изобретение относится к техникеавтоматического регулирования и может быть использовано, например, вустройствах числового программногоуправления станками и промышленнымироботами. Целью изобретения являетсяповышение точности работы устройствадля программного управления приводом. 801226410 А Устройство содержит генератор импульсов, делитель частоты, первый выход которого соединен с первым входом первого и второго сумматоров, первый реверсивный счетчик импульсов, блок сложения-вычитания, второй реверсивный счетчик импульсов, цифроаналоговый преобразователь, логический блок, блок ключей, датчик положения привода, Фильтр, демодулятор, интегратор, преобразователь напряжение - частота, регистр и распределитель импульсов. Введение регистра при Формировании Фазомодулированных сигналов позволяет повысить статическую точность устройства за счет исключения коротких импульсов в сигналах питания датчика у положения привода, а включение в сос- %У ф ;ав устройства распределителя импуль- С :ов позволяет подавить малые колебаФС сия выходного напряжения устройства ил.Изобретение относится к технике автоматического регулирования и может быть использовано, например, в устройствах числового программного управления станками и промьпдленными роботами.Цель изобретения - повышение точности работы устройства для программного управления приводом.Для повышения точности устройства необходимо обеспечить стабилизацию Формы сигналов питания датчика положения путем исключения искажений, вносимых переходными процессами на выходах первого и второго сумматоров, С этой целью в устройство введен ре-. гистр, управпяющий вход которого объединен с входом делителя частоты, а информационные входы подключены к выходам сумматоров, что обеспечивает фиксацию сигналов с выходов сумматоров в момент, когда переходные процессы в комбинационной части сумматоров закончены. Снижение точности известных устройств программного управления приводами обусловлено также наличием в них малых автоколебанийвыходного вала, амплитуда которых пропорциональна весу младшего разряда кода управления приводом в первом реверсивном счетчике. Для устранения вйияния этого явления на точность работы предлагаемого устройства в него введен распределитель импульсов, обеспечивающий прохождение авто- колебательного сигнала через третьи входы первого и второго сумматоров и блокирующий их прохождение на вход реверсивного счетчика.В динамических режимах точность устройства повышается за счет включения блока сложения-вычитания навходе реверсивного счетчика, Что обеспечивает инвариантность устройства по управляющему воздействию и тем самым повышение точности его работы.На Фиг. 1 приведена структурная схема устройства, на фиг. 2 - пример решения распределителя импульсов, на Фиг. 3 - пример решения логического блока; на фиг, 4 - временные диаграммы работы устройства.Устройство содержит генератор 1 импульсов, делитель 2 частоты первый 3 и второй 4 сумматоры, регистр 5, логический блок б, блок 7 ключек, датчик 8 положения привода, Фильтр 9 демодулятор 10, интегратор 11, преобразователь 12 напряжение-частота,распределитель 13 импульсов, первыйреверсивный счетчик 14 импульсов,5 блок 15 сложения-вычитания, второйреверсивный счетчик 16 импульсов ицифроаналоговый преобразователь 17,Распределитель 13 импульсов(Фиг. 2) состоит из Б.Б -триггера 18,1 О элементов И 19 и 20, имеет входы 21и 22, первые выходы 23 и 24 и дополнительный выход 25,Логический блок 6 (фиг. 3) имеетэлементы НЕ 26-29, элемент И 30-33,15 а блок 7 ключей показан в виде эквивалентной схемы, где показаны ключи34-37.Сигнал на демодулятор 10 снимаетсл со старшего (и-го) разряда делителя 2, гце и - число разрядов дели.теля 2 и реверсивного счетчика 14,что связано с необходимостью подачива демодулятор опорного сигнала,равного по частоте сигналу питания25 датчика. 3 случае двоичной реализацииделителя 2 период опорного сигнала в2" раз превышает период следованияимпульсов на выходе генератора 1.Регистр 5 состоит из триггеровгила Э . Информация, поступившая навходные линии такого триггера к моменту возникновения перепада иливФронта тактового сигнала, определяет каким будет состояние выхода напоследующем интервале времени. Фиксирующие схемы - "защелки" и регистрыпозволяют запомнить комбинацию двоичных разрядов, поданную на их входы, и хранить ее после изменениявходных сигналов. Переходные процессы, возникающие в сумматорах 3 и 4 после каждого изменения кода в счетчике 2 по сигналу с генератора 1, вызывают появление "провалов" и "выбросов" на выходах сумматоров Для исключения переходных процессов регистр 5 "фиксирует" сигналы с выходов сумматоров после скончания переходных процессов.Генератор 1 импульсов соединен с входом записи регистра 5 и входом делитегя 2 частоты, представляющего собой двоичный или двоично-десятичный счетчик. Сумматоры 3 и 4 представляют собой стандартные сумматоры, четырехразрядные двоичные сумматоры, осуществляющие сравнение кодов делнте.гя 2 частоты и реверсивногосчетчика 14. Регистр 5 состоит из триггеров, работающих по тактовым сигналам от генератора 1 импульсов. Логический блок 6 преобразует модулированные по фазе сигналы в широтно- модулированные,Блок 7 ключей на транзисторах усиливает по мощности сигналы для питания датчика 8 положения, в качестве которого может быть использован синусно-косинусный трансформаторный датчик (Вт, резольвер, индуктосин и т.п.). С выхода датчика 8 положения сигнал через фильтр 9, представляющий собой частотно-зависимый усилитель, например, на операционных усилителях, поступает на демодулятор 10, выполняющий функции Фазочувствительного выпрямителя. Интегратор 11 представляет собой элемент последовательной коррекции устройства и может быть реализован стандартной схемой на операционных усилителях, имеющей пропорционально-интегральную передаточную характеристику. С выхода интегратора 11 сигнал через преобразователь 12 напряжение-частота, реализованный, например, на основе интегратора, компаратора и разрядного ключа, поступает на вход распределителя 13 импульсов. С выхода последнего сигналы поступают на входы блока 15 сложения-вычитания и первого реверсивного счетчика 16, выходы которого управляют цифроаналоговым преобразователем 17. Блок сложения- вычитания 15 состоит из двух элементов ИЛИ. Через первый элемент ИЛИ импульсы с положительного входа устройства и положительного выхода распределителя импульсов 13 поступают на вход суммирования реверсивного счетчика 14 импульсов, а через второй элемент ИЛИ отрицательные импульсы поступают на вход вычитания реверсивного счетчика 14 импульсов.Устройство работает следующим образом.В статическом режиме, когда информация на входе устройства отсутствует и переходные процессы закончены, устройство находится в режиме стабилизации положения привода. Импульсы тактовой частоты от генератора 1 импульсов заполняют делитель 2 частоты. На входы первого сумматора 3 информация от делителя 2 и реверсивного счетчика 14 поступает в прямых кодах. На входы второго сумматора 4 информация от делителя 2 поступает в прямом коде, а от реверсивного счетчика. 14 импульсов - в обратном коде. На выходах сумматоров 3 и 4 формируются прямоугольные сигналы, модулированные по фазе в соответствии с кодом реверсивного счетчика 14 импульсов, однако указанные сигналы в силу ограниченного быстродействия сумматоров имеют большое число провалов и выбросов, что приводит к искажению Формы импульсов на выходах сумматоров 3 и 4. Для исключения влияния переходных процессов на сигналы в устройство введен регистр 5, в котором фиксируются выходные сигналы сумматоров 3 и 4 после каждого изменения кода в делителе 2 частоты. Такая фиксация повышает точность преобразователя, на которую перестают влиять искажения формы импульсов на выходах сумматоров 3 и 4. Сигналы с выходов регистра 5 через логический блок 6, Формирующий две последовательности чередующихся разнополярных широтно-модулированных прямоугольных импульсов, поступают на блок 7 ключей, выходы которого соединены с входными обмотками датчика 8 положе- ЗОния, Выходной сигнал с датчика 8 положения через фильтр 9 структуры.Селена-КИ, выделяющий первую гармонику напряжения, поступает на демодулятор 10. Последний выполняет функции фазочувствительного выпрямителя.Уровень сигнала на его выходе пропорционален амплитуде входного сигнала, а знак определяется соотношением фаэ входного и опорного сигналов, В случае, если эти сигналы синфазны - 4 О выходное напряжение демодулятора 10положительно. Если же укаэанные сигналы противофазны - выходное напряжение отрицательно. В согласованном состоянии, когда код реверсивного4 счетчика 14 импульсов пропорционаленперемещению датчика 8 положения, напряжение на выходе демодулятора 10 равно нулю и устройство находится в автоколебательном режиме. При этом напряжение на выходе интегратора 11является знакопеременным, а импульсына положительном и отрицательном выходах преобразователя 12 напряжение- частота (входы 21 и 22 распределите 55 ля 13 импульсов) чередуются, При смене напряжения, например после прекращения импульсов на входе 21,приходитимпульс на вход 22, триггер 18 сменя 1226410ет свое значение по заднему фронтуимпульса, изменяя значение выхода 25,а сам импульс блокируется элементомИ 20. Второй и послецующие импульсыс входа 22 беспрепятственно проходятна выход 2 ч. Таким образом, распределитель 13 импульсов блокирует прохождение первого импульса с входов 1и 22 на выходы 23 и 2 ч соответственно при изменении знака направления,а сам знак направления в виде логического сигнала присутствует на дополнительном выходе 25 распределителя 13 импульсов. Таким образом, 15в статическом режиме устройство остается замкнутым по цепи обратнойза счет сигнала на дополнительномвыходе распределителя 13 импульсовзначение которого определяется знаком напряжения на выходе интеграто-"ра 11. При этом распределитель 13импульсов блокирует прохождение сигналов на входе блока 15 сложениявычитания и первого реверсивного ссчетчика 16, код которого, оставаясьнулевым, обеспечивает неподвижностьпривода,При изменении положения датчика 8например, за счет возмущающего воздействия, на выходах,демодулятора 1 Ои интегратора 1 1 формируется напряжение полярность которого зависитот напряжения смещения датчика Я. Свыхода преобразователя 12 напряже-ние-частота импульсы через распределитель 13 и блок 15 сложения-вычитания изменяют код реверсивного счетчика 14 импульсов на величину Й Х,пропорциональную величине перемеще- ,0ния датчика 8. Величина 6 Х такжевписывается в первый реверсивныйпоявдение напряжения на вьглоде устройства, обеспечивающего перемещение привода ь старону компенсации возмущенного переме -щения датчика 8. Такое движение продолжается до обнуления первогореверсивного счетчика и возвращенияреверсивного счетчика 1 ч в состояние, соответствующее невозмущенномуположению датчика 8. В динамическом режиме, когда на вход устройства поступают задающие импульсы, происходят процессы аналогичные описанным, Так, например, при движении привода с постоянной скоростью задающие импульсы через блок 15 сложения-вычитания поступаютна входы второго реверсивного счетчика, причем, если скорость движения привода соответствует заданной(скорости перемещения датчика 8 икода счетчика 14 импульсов равны),импульсы на выходе распределителя 13импульсов не формируются и устройство работает в режиме малых отклонений (аналогично статическому режиму). При наличии разности в скорости привода и задающего воздействия код реверсивного счетчика 16импульсов соответственно изменяется,обеспечивая уменьшение или увеличение скорости привода для приведенияее к заданному значению,Таким образом, применение регистра при Формировании Фаэомодулированных сигналов позволяет повысить статическую точность устройства за счет исключения коротких импульсов в сигналах питания датчика. Включение в со=тая устройства распределителя импульсов позволяет подавить малые автоколебания выходного напряжения устройства. .Перенос блока сложения-вычитания на вход второго реверсивного счетчика позволяет обеспечить в устройстве инвариантность по управляющему воздействию в режиме постоянной скорости, что позволяет значительно повысить точность работы устройства при больших скоростях перемещения.Формула изобретенияУстройство для программного управления приводом, содержащее генератор импульсов, выход которого соединен с входом делителя частоты, первый зыход которого соединен с первыми входами первого и второго сумматоров, первый реверсивный счетчик импульсов, первый и второй выходы которо.го соединены с вторыми входами пс рвого и второго сумматоров соответственно, а входы первого реверсивного счетчика импульсов соединены через блок сложения-вычитания с входами устройства для программного управления приводом, второй реверсивный счетчик импульсов, подключенный ;:ыходом к входу цифроаналогового преобразователя, а также последовательно соединенные логический блок, блок ключей, датчик положения приво 12264101 О да, фильтр, демодулятор, интегратори преобразователь напряжение-частота,второй выход делителя частоты подключен к управляющему входу демодулятора, о т л и ч а.ю щ ее с я тем,что, с целью повьппения точности устройства в работе, в него введены распределитель импульсов и регистр, выходы которого соединены с входамилогического блока, первые и вторыевходы - соответствейно с выходами первого и второго сумматоров, а управляющий вход - с выходом генератора импульсов, выходы преобразователянапряжение-частота соединены с входами распределителя импульсов, первыйвыход которого соединен с третьимивходами первого и второго сумматоров,вторые выходы - с вторыми входамиблока сложения-вычитания и входамивторого реверсивного счетчика импульсов.1226410 Грааьк сигнала юа дыждгделля с цаспюяц Градации аигмлог юа й одак регистра а гиш ат Составитель И.Швецр Е,Папп Техред И.Попович Корректор М.Максимишине Реда П исно СССР оектиая, 4 Произнодствеи дприятие, и, Ужгород олиграическ Заказ 2131/4 б Ти ВНИИПИ Гос по делам 113035, Москж 836арствензсбретеж,ого комитета ий и открытиь Раушская наб,рирав сигкало упраййнцю клюю% лока 7 юдылдою логаческого алака д
СмотретьЗаявка
3787398, 15.05.1984
ЛЕНИНГРАДСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА, ПРЕДПРИЯТИЕ ПЯ А-3890
ВЫШЕЦКИЙ ДМИТРИЙ ИЛЬИЧ, ЗЕНКЕВИЧ ЮРИЙ АНАТОЛЬЕВИЧ, ГРИЦАЙ АНАТОЛИЙ СЕМЕНОВИЧ, КОРОВИН БОРИС ГЕРМАНОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: приводом, программного
Опубликовано: 23.04.1986
Код ссылки
<a href="https://patents.su/6-1226410-ustrojjstvo-dlya-programmnogo-upravleniya-privodom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления приводом</a>
Цифровое устройство для обработки информации частотных датчиков

Номер патента: 1239622
Опубликовано: 23.06.1986
Авторы: Баржин, Вервейко, Гудков, Шмалий
МПК: G01R 23/10
Метки: датчиков, информации, цифровое, частотных
...блока разделения каналов через третий ключевой элемент 10 поступают на вычитающий вход второго реверсивного счетчика 5, а импульсы 15 частоты Р в течение времени Т с второго выхода блока разделения каналов через четвертый ключевой элемент 11 поступают на суммирующий вход второго реверсивного счетчика 15. На выходе второго реверсивного счетчика 15 появляется код температурыИ=-Т ,+ТВ рЕжиме коррекции после появления нулевого уровня сигнала ТИ, на втором 25 выходе формирователя 18 координатной сетки из сигнала Г генератора 8 опорной частоты формируется параллельный код границы области допустимой погрешности, по давлению (фиг.2),ЗО который поступает на вход первого за-. поминающего устройства 17. С выхода последнего на третий вход первой...
Цифровое устройство для обработки информации частотных датчиков

Номер патента: 1525609
Опубликовано: 30.11.1989
МПК: G01R 23/10
Метки: датчиков, информации, цифровое, частотных
...опроса и,П, должна быть больше, чем(1,5-2)1,щ, длительносгь периода импульсов частоты опроса зависит от требуемой погрешности измеряемой частотыГ;, Погрешность измерения определяется 2/и. Блок 3 управления вьрабатывает сетку синхронизирующих сигналов для управления блоком 6 вычислений и код адреса измерительного канала 4-и, поступающий по шине 8 в распределитель 9 и запоминающее устройство 7.Процесс измерения и обрабогки информации рассмотрим на примере рабо ты одного из измерительньж каналов 4-и.Во время действия импульса эталонного временного интервала, поступающего в блок 3 управления, на первый5 вход блока 6 вычислений осуществляется задание нулевого (начального) ацреса (Фиг. 3) и измерение приращения частоты Е, частотного...
Устройство для контроля цифровых блоков

Номер патента: 1503031
Опубликовано: 23.08.1989
Автор: Мурашко
МПК: G01R 31/317
...26 устройства, Высвечивается сегментиндикатора 25. По заднему фронту (1 в О) сигнала с выхода "Заем счетчика 5 происходит переключение пятог. триггера 10 в нулевое состояние,которое запрещает дальнейшее поступление тактовых импульсов на вычитающий вход счетчика 5 через первый элемент И 4, На индикаторе 25 сохраняется высвечивание соответствующего сегмента до следующего импульса по входу 27.2, На входе 26 в течение контролируемого такта присутствует нулевой потенциал. Срабатывает пороговый блок 2 (Фиг,2 б), единичный потенциал с выхода которого через элементЫ И-НЕ 12 и И 15 вызывает индикацию сегмента "-", Выч.тающие импульсы поступают на вход счетчика 5 до тех пор, пока число тактовых импульсов не станет равным ранее установленному...
Устройство для выявления взаимного рассогласования датчиков углового положения

Номер патента: 396666
Опубликовано: 01.01.1973
МПК: G05B 1/01
Метки: взаимного, выявления, датчиков, положения, рассогласования, углового
...устройство отличается тем, что в нсго ввсдснь 1;1 вс фазосдвигаю)цис цспц, ЛВ 1 уснлцтсл 51-ОГ 1) а пинтсля, Лва 1) азовых дстсктора и коммутатор знака сигнала рассоГласовани 51, ВВ 1 ход которого сос;1 пцсн с пороГовь)к 1 элсаситом, )1 два Входа срез соответствующие фазовый детектор, усилитель-ограничитель и фазосдвпгающую цсшс соотвстствуО)цпк дат)ико угл)ВОГО поло)кения,повысить точность устройстдпстабплнзирукнцпх фактоговыц элемент 1-1, ключевую схему с исполнительным рслс 15 ц блок 1 б сигнализации.Устройство работает следующим образом.Выходные напряжения латчцков 8 и 4 поЛают на фазосдвцгающпс цепочки 7 и 8. Усилители-ограничители 9 и 10 исключают влияние изменения выходных напряжений датчиков на работу...
Устройство компенсации постоянной составляющей фотоэлектрического датчика

Номер патента: 960888
Опубликовано: 23.09.1982
МПК: G08C 9/06
Метки: датчика, компенсации, постоянной, составляющей, фотоэлектрического
...а выход подключен к счетному входу реверсивного счетчика.На чертеже представлена структурная схема устройства.Выход фотоэлектрического датчика подключен к двум пиковым детекторам 2 и 3, формирователю 1 импульсов и входу сложения сумматора 5. Выходы пиковых детекторов 2 и 3 подключены к потенциометру 6, выход которого подключен к одному входу компаратора 7. Выходы компаратора 7 подключе 40 ны к управляющим входам реверсивного счетчика 8, выходы разрядов которого подключены к блоку 9 преобразования кода в напряжение, выход блока 9 подключен к другому входу компаратора 7 4 ф и входу вычитания сумматора 5. Выход компаратора 7 через дифференцирующий элемент 10 подключен к нулевому входу триггера 11, единичный вход которого соединен с...
Предыдущий патент: Устройство для программного управления исполнительными элементами
Следующий патент: Устройство для управления синхронно перемещающимися объектами
Случайный патент: 247858