Устройство определения параметров движения изображения поверхности
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
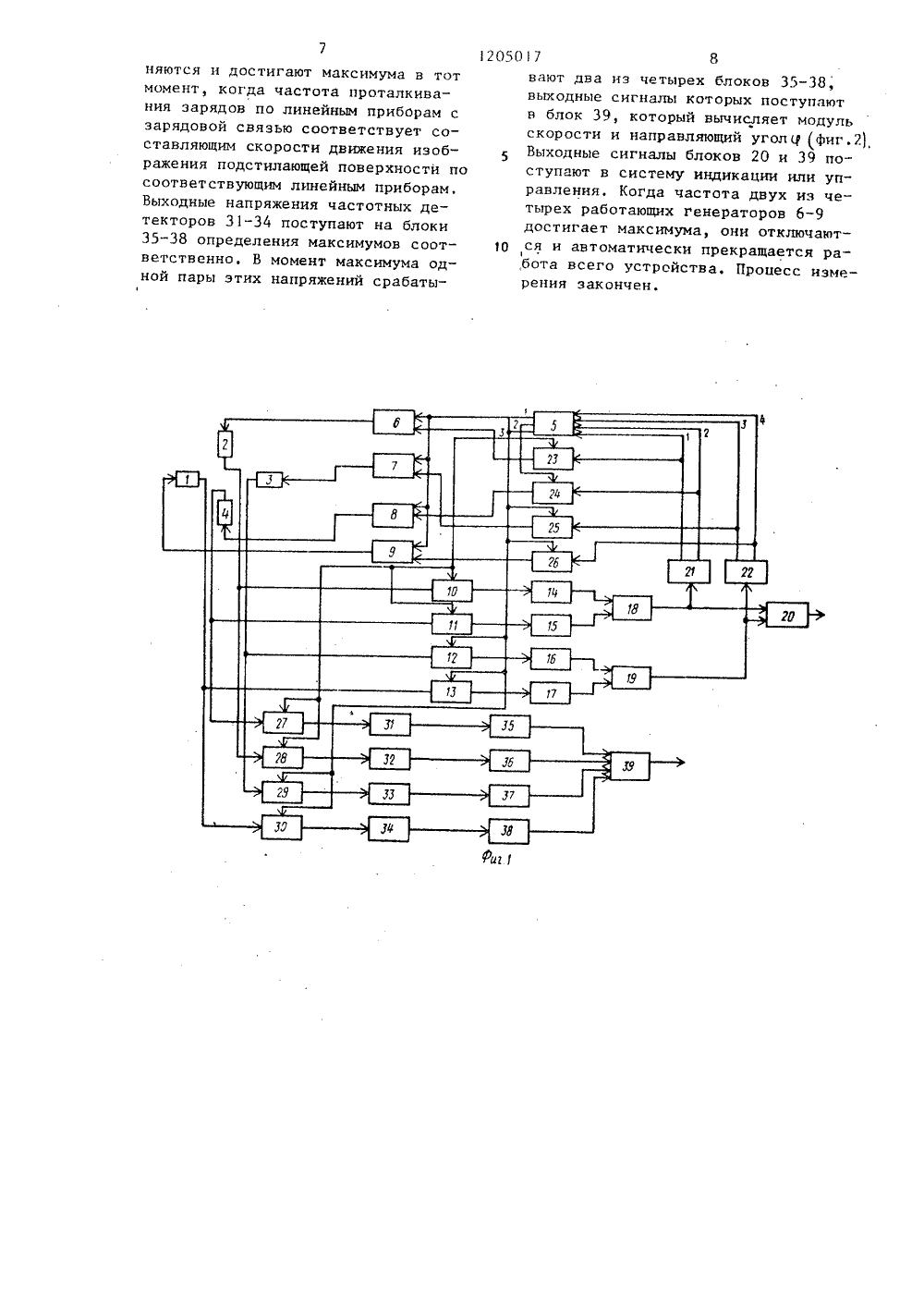
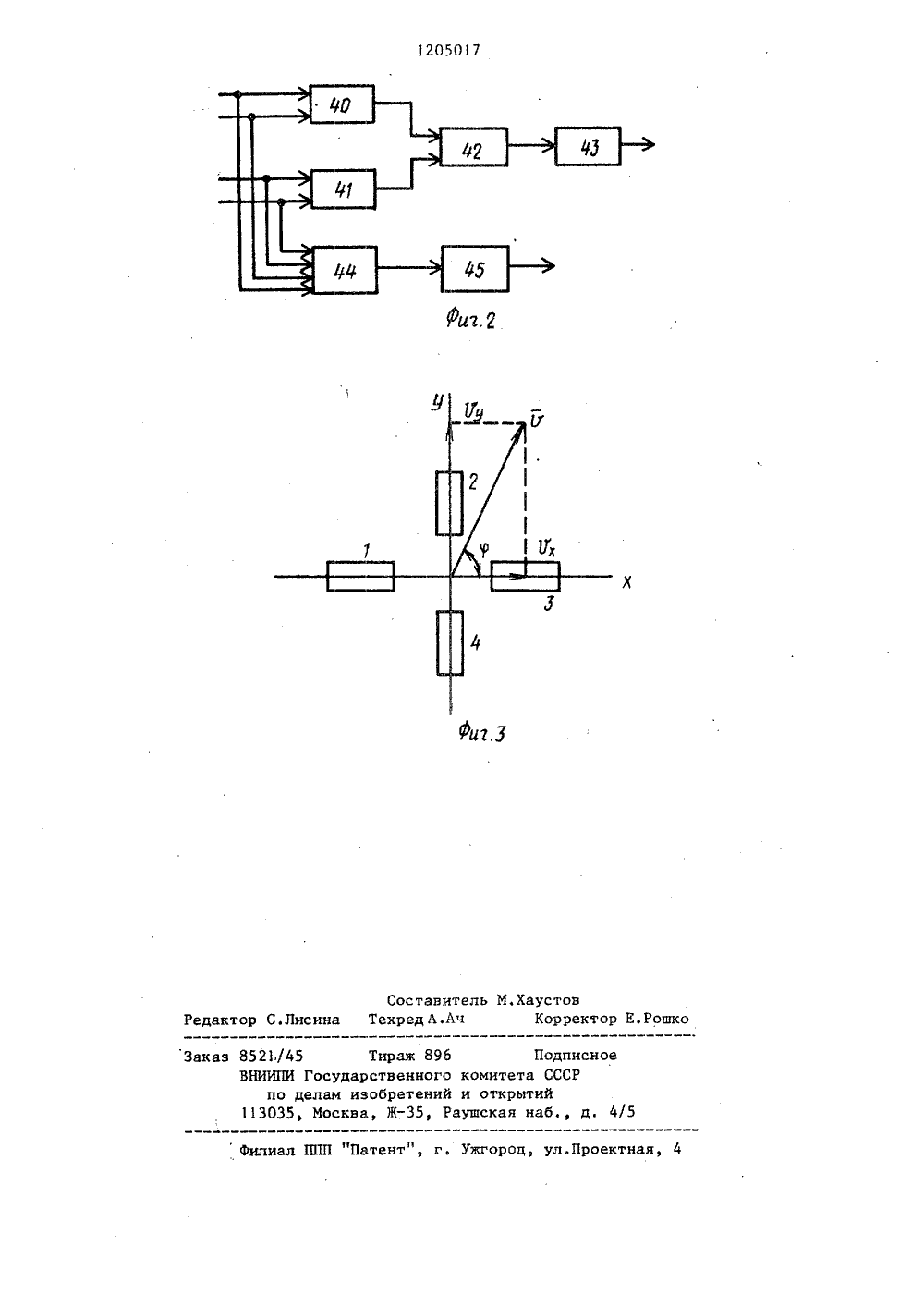
(46) 15,ч и пятого норм соответственн ого ектственн и четимумаретьимислен УДАРСТВЕННЫЙ НОМИТЕТ СССР ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ АВТОРСНОМУ СВИДЕТЕЛЬСТ 9810/24-102.8201.86.Бюл. 9 2(71) Куибьппевский ордена Трудового Красного Знамени политехнический ин ститут им.В.В.Куйбьппева(53) 621,317.39:531.7(088.8) (56) Авторское свидетельство СССР Ф 336836, кл. Н 04 Б 7/021, 1970.Авторское свидетельство СССР 9 585443, кл. С О 1 Р 3/74, 1976.(54)(57) УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ ПО - ВЕРХНОСТИ, содержащее линейный прибор с зарядовой связью, расположенный в фокальной плоскости объектива и генератор тактовой частоты, о т л и ч а ю щ е е с я тем, что, с целью определения направления движения вектора скорости изображения поверхности, в него введены второй, третий и четвертый линейные приборы с зарядовой связью, расположенные в фокальной плоскости объектива под углом 90 друг к другу и к первому0прибору, второй, третий и четвертый генераторы тактовой частоты, синхрогенератор, четыре нормально открытых ключа и восемь нормально закрытых ключей, восемь частотных детекторов, два блока вычитания, два распределительных блока, четыре блока определения максимума, блок определения квадранта и блок вычисления модуля вектора скорости движения иэображения поверхности и направляющего угла, при этом синхрогенератор первым выходом соединен с первыми входами первого, второго, третьего и четвертого генераторов, тактовой частоты, выходы которых подключены к входам второго, третьего, четвертого и первого линейных приборов с зарядовой связью соответственно второй выход синхрогенератора соединен с первыми входами первого и второго нормально открытых ключей, с первыми входами первого и второго нормально закрытых ключей и с первыми входами пятого и шестого нормально закрытых ключей третий выход синхрогенератора подключен к первым входам третьего и четвертого нормально открытых ключей, к первым входам третьего и четвертого нормально закрытых ключей и к первым входам седьмого и восьмого нормально закрытых ключей выходы первого, второго, третьего и четвертого линейных приборов с зарядовой связью соединены с вторыми входами четвертого, первого, третьего и второго нормально открытых ключей соответственно, а также с вторыми входами восьмого, шестого, седьмогоально закрытых ключейо, выходы пятого, шестого, седьмого и восьмого нормально ытых ключеи соответственно под ключены к входам пятого, шес седьмого и восьмого частотных торов, выходы которых соотв через первый, второй, третий вертый блоки определения ма соединены с первым, вторым, и четвертым входами блока в ния модуля вектора скорости ния иэображения поверхности205017 частоты,иравляющего угла, выходы первогои второго нормально открытых ключейсоответственно через первый и второйчастотные детекторы подключены кпервому и второму входам первого блока вычитания, выходы третьего и четвертого нормально открытых ключейсоответственно через третий и четвертый частотные детекторы соединеныс первым и вторым входами второгоблока вычитания, выход первого блока вычитания подключен к первому входу блока определения квадранта, ачерез первый распределительный блокк первому и второму входам синхрогеИзобретение относится к приборостроению и может быть использовано для измерения скорости движения изображения подстилающей поверхности например, при аэрофотографировании в компенсаторах скоростного смаза изображения.Цель изобретения - определение направления движения вектора скорости изображения поверхностиНа фиг.1 показана блок-схема предлагаемого устройства; на фиг.2 схема блока вычисления модуля вектора скорости движения изображения по верхности и направляющего угла; ча фиг.3 - прямоугольная система координат, реализуемая четырьмя приборами с зарядовой связью и действие вектора скорости движения изображения подстилающей поверхности в этой системе.Устройство определения параметров движения изображения поверхности содержит линейные приборы 1-4 с зарядовой связью, синхрогенератор 5, первый, второй, третий и четвертый генераторы тактовой частоты бсоответственно, первый, второй, третий и четвертый нормально открытые ключи 1 Осоответственно, первый, второй, третий и четвертый частотные детекторы 14-1 соответственно, первый 18 и второй 19 блоки вычитания, блок 20 определения квадранта, первый 21 и второй 22 распреЬ нератора и к вторым входам первого ивторого нормально закрытых ключей,выход второго блока вычитания соединен с вторым входом блока определения квадранта, а через второй распределительный блок - с третьим ичетвертым входами синхрогенератораи с вторыми входами третьего и четвертого нормально закрытых ключей,выходы первого, второго, третьегои четвертого нормально закрытых ключей подключены соответственно к вторым входам первого, второго, третьего и четвертого генераторов тактовой делительные блоки, первый, второй,третий, четвертый, пятый, шестой,седьмой и восьмой нормально закрытые ключи 23-30 соответственно, пя 5 тый, шестой, седьмой и восьмой частотные детекторы 31-34 соответственно, первый, второй, третий и четвертый блоки 35-38 определения максимума соответственно, блок 39 вычисления модуля вектора скоростидвижения изображения поверхности инаправляющего угла, включающий квадраторы 40 и 41, сумматор 42, блок 43извлечения квадратного корня, блок15 44 определения тангенса, блок 45реализующий функцию агс 8,Четыре линейных прибора 1-4 сзарядовой связью расположены ортогонально друг другу так, что их20 оси совпадают с осями прямоугольной системы координат, расположеныони в фокальной плоскости объектива не показана) и на них проектируется изображениеподстилающей поверхности. Синхрогенератор 5 фиг.1)своим первым выходом соединен с первыми входами первого 6 второго 7,третьего 8 и четвертого 9 генераторов тактовой частоты, выходы кото 30 рых соединены с входами второго 2,третьего 3, четвертого 4 и первоголинейных приборов с зарядовойсвязью соответственно. Второй выход синхрогенератора 5 соединен спервыми входами первого 10 и второ1205 35 45 го 11 нормально открытых ключей, с первым входом первого 23 и второго 24 нормально закрытых ключей и с первыми входами пятого 27 и шестого 28 нормально закрытых ключей. Третий выход синхрогенератора 5 соединен с первыми входами третьего 12 и четвертого 13 нормально. открытых ключей, с первыми входами третьего 25 и четвертого 26 нормально закры О тых ключей и с первыми входами седьмого 29 и восьмого 30 нормально закрытых ключей, Выходы первого 1, второго 2, третьего 3 и четвертого 4 линейных приборов с зарядовой связью 15 присоединены к вторым входам четвертого 13, первого 1 О, третьего 12 и второго 11 нормально открытых ключей соответственно, а также к вторым входам восьмого 30, шестого 28, 20 седьмого 29 и пятого 27 нормально зак рытых ключей соответственно, выходы пятого 27, шестого 28, седьмого 29 и восьмого 30 нормально закрытых ключей соответственно соединены с25 входами пятого 31, шестого 32, седьмого 33 и восьмого 34 частотных детекторов, выходы которых соответственно через первый 35, второй 36, третий 37 и четвертый 38 блоки оп- З 0 . ределения максимума соединены с первым, вторым, третьим и четвертым входами блока 39 вычисления модуля вектора скорости движения изображения подстилающей поверхности и направляющего угла Выходы первого 10 и второго 11 нормально открытых ключей через первый 14 и второй 15 частотные детекторы соединены с первым и вторым входами первого 18 блока 40 вычитания, а выходы третьего 12 и четвертого 13 нормально открытых ключей через третий 6 и четвертый 17 частотные детекторы соединены с пер - вым и вторым входами второго блока 19 вычитания, выходы первого 18 и второго 19 блоков вычитания присоединены к блоку 20 определения квадранта непосредственно, а также через первый распределительный блок 21 вы ход первого блока 18 вычитания соединен с первым и вторым входами синхрогенератора 5 и вторыми входами первого 23 и второго 24 нормально закрытых ключей. Через второй рас пределительный блок 22 выход второго вычитающего блока 19 соединен с третьим и четвертым входами синхрогенеО 7 4ратора 5 и с вторыми входами третьего 25 и четвертого 26 нормально закрытых ключей. Выходы первого 23, второго 24, третьего 25 и четвертого 26 нормально закрытых ключей соединены ф с вторыми входами первого 6, третье- . го 8, второго 7 и четвертого 9 гене 1 раторов тактовой частоты соответст 1 венно. Определитель квадрантов состоит из логических схем И и ИЛИ, а вычислитель модуля вектора скорости движения изображения поверхности и направляющего угла представляет собой специализированный вычислитель, в котором выходы блоков 35-38 определения максимума подключены к блоку 44 определения тангенса (фиг 3) для вычисления направляющего угла и, соответственно, попарно соединены с первым 40 и вторым 41 квадраторами для вычисления модуля. Выходы квадраторов 40 и 41 через сумматор 42 подключены к блоку 43 извлечения квадратного корня, а выход блока 44 определения тангенса соединен с входом блока 45, реализующего функцию агс 1 р.1Устройство работает следующим образом.В момент измерения синхрогенератор 5 вырабатывает первый управляющий импульс, который одновременно запускает генераторы тактовой частоты 6,7,8,9, которые начинают проталкивать заряды в линейных приборах с зарядовой связью 2,3,4,1 соответственно, причем в первом цикле измерения генераторы 6-9 работают в режиме постоянной частоты и проталкивают заряды в каждом линейном приборе 1-4 с зарядовой связью с постоянной скоростью в направлениях от центра прямоугольной системы координат ХОУ. Выходные сигналы с линейных приборов 1-4 с зарядовой связью поступают через нормально от крытые ключи 13, 10, 12 и 11 на час. тотные детекторы 17, 14, 16, 15 соответственно.Частотный спектр выходного сигнала каждого прибора с зарядовой связью зависит от соотношения скорости и направления движения изображения подстилающей поверхности, с одной стороны, и скорости проталкивания зарядов, с другой стороны. Так, если вектор скорости движения изображения подстилающей поверхнос 5 1205 ти имеет направление Ч (фиг,2), то по линейным приборам с зарядовой связью, расположенным ортогонально, изображение перемещается со скоростью Ч и Ч соответственно, Максимальная ширина спектра выхоцного сигнала линейных приборов с зарядовой связью имеет место в том случае, если направление проталкивания зарядов по линейному прибору, расположенному вдоль оси Х, совпадает с направлением Ч и скорость проталкивания по модулю Ч, а направление проталкивания зарядов по линейному прибору, расположенному вдоль оси У, совпадает с направлением Ч и скорость проталкивания по модулю Ч . Если модуль скорости проталкивания больше или меньше )Ч) и 1 Ч,11 соответственно, то20 ширина спектра сужается, Аналогичная картина имеет место, если направление проталкивания зарядов изменяется на противоположное. Если частота проталкивания зарядов одинакова, что д имеет место в первом цикл измерения, то ширина спектра выходного сигнала зависит только от направления проталкивания.На выходе частотных детекторовимеют место напряжения, величинакоторых пропорциональна ширина спектра сигнала, снимаемого с соответствующих приборов с зарядовой связью, Эти напряжения попарно подаются на З 5 два вычитающих блока 18 и 19, при - чем на каждый из них поступают напряжения, пропорциональные ширине спектров сигналов, снимаемых с двух приборов с зарядовой связью, расположенных соосно. При постоянной скорости проталкивания зарядов по линейным приборам и направлении проталкивания от центра прямоугольной системы координат знак разностного напряжения на выходе каждого из вычитающих блоков 18 и 19 зависит от того, в какой полуплоскости расположен вектор скорости движения изображения подстилающей поверхности. Комбинация знаков указывает квадрант расположения этого вектора. Напряжения с блоков 18 и 19 подаются на блок 20 определения квадранта, а так - же на распределительные блоки 21 и 22 соответственно. В зависимости от знака напряжения вычитающего блока 18 распределительный блок 21 включает 017 бключи 23 или 24. Одновременно на вход синхрогенератора 5 поступает сигнал, под влиянием которого первый управляющий импульс снимается и вырабатывается второй управляющий импульс, который проходит через один из открытых ключей 23 и 24 и приводит в работу генераторы б или 8 тактовой частоты.В зависимости от знака напряже - ния вычитающего блока 19 распределительный блок 22 включает ключи 25 или 2 б. Одновременно на вход синхрогенератора 5 поступает сигнал, под влиянием которого первый управляю- щий импульс снимается (в случае, если на выходе блока 18 имеется 0) и вырабатывается третий управляющий импульс, который проходит через один из открытых ключей 25 или 2 б и приводит в работу генераторы 7 или 9 тактовой частоты. Одновременно второй и третий управляющий импульсзакрывают нормально открытые ключи 10-13 и открывают нормально закрытые ключи 27-30. На этом первый цикл работы устройства завершен. В результате определен квадрант расположения вектора скорости движения подстилающей поверхности и включены два из четырех :енераторов тактовой частоты, которые управляют линейками, расположенными ортогонально и по осям именно этого квадранта. Начинается второй цикл работы, Под влиянием второго и третьего управляющих импульсов синхрогенератора 5 генераторы тактовой частоты б или 8 и 7 или 9 работают в режиме переменной частоты, при котором частота их выходного сигнала изменяется от некоторого минимума до максимума, определяемого верхней границей измеряемых скоростей. В работе принимают участие два прибора с зарядовой связью, расположенные по осям выбранного в предыдущем цикле работы квадранта расположения вектора скорости движения изображения подстилающей поверхности. Это могут быть пары 1-2, или 2-3, или 3-4 или 1-4 приборов с зарядовой связью. Выходные сигналы этих пар через ключи 27-30 поступают на частотные детекторы 31-34, выходные сигналы которых под влиянием изменения частоты генераторов тактовой частоты ме -няются и достигают максимума в тотмомент, когда частота проталкивания зарядов по линейным приборам сзарядовой связью соответствует составляющим скорости движения изображения подстилающей поверхности посоответствующим линейным приборам.Выходные напряжения частотных детекторов 31-34 поступают на блоки35-38 определения максимумов соответственно. В момент максимума одной пары этих напряжений срабаты 205017вают два из четырех блоков 35-38,выходные сигналы которых поступаютв блок 39, который вычисляет модульскорости и направляющий угол(фиг.2),Выходные сигналы блоков 20 и 39 поступают в систему индикации или управления. Когда частота двух из четырех работающих генераторов 6-9достигает максимума, они отключаютО ся и автоматически прекращается ра,бота всего устройства. Процесс измерения закончен,/5 ал ППП "Патент", г. Ужгород, ул.Проектная осударственного лам изобретений Москва, Ж, Р Подписноекомитета СССРи открытийушская наб д. 4
СмотретьЗаявка
3529810, 28.12.1982
КУЙБЫШЕВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
КАРПОВ ЕВГЕНИЙ МАКСИМОВИЧ, СБРОДОВ ВЛАДИМИР ВАСИЛЬЕВИЧ, КОРГАНОВА ОЛЬГА ГЕОРГИЕВНА
МПК / Метки
МПК: G01P 3/36
Метки: движения, изображения, параметров, поверхности
Опубликовано: 15.01.1986
Код ссылки
<a href="https://patents.su/6-1205017-ustrojjstvo-opredeleniya-parametrov-dvizheniya-izobrazheniya-poverkhnosti.html" target="_blank" rel="follow" title="База патентов СССР">Устройство определения параметров движения изображения поверхности</a>
Устройство для отладки программно-аппаратных блоков

Номер патента: 1242965
Опубликовано: 07.07.1986
Авторы: Бадашин, Ланда, Леонтьев, Палагин, Сигалов
МПК: G06F 11/28
Метки: блоков, отладки, программно-аппаратных
...выхода 68 регистра 16 поступает на соответствующую шину отлаживаемой микроЭВМ.Затем дешифратор 11 вырабатывает сигнал обращения к отлаживаемой микро- ЭВМ, При совпадении этого сигнала с сигналом "Блокировка", сигнал уровня логической "1" с выхода элемента И 26 через одновибратор 28 устанавливает по единичным входам триггеры 29 и 30Сигнал уровня логической "1" поступает на вход элемента И 32, а сигнал уровня логического "0" с нулевого выхода триггера 29 поступает на вход элемента ИЛИ 33, Так как в начале машинного цикла управляющей . микроЭВМ сигналы вьдачи информации (поступает на второй вход элемента И 32) и приема информации (поступает на второй вход элемента ИЛИ ЗЗ) отсутствуют (логический "0"), на выходе элемента И 32 и на выходе...
Устройство для отладки программно-аппаратных блоков

Номер патента: 1348839
Опубликовано: 30.10.1987
Авторы: Гудзенко, Кельнер, Сигалов, Юрасов
МПК: G06F 11/28
Метки: блоков, отладки, программно-аппаратных
...условиямиво время отладки при каждом обращении МП к памяти или УВВ на одном изуправляющих выходов элементов ИЛИ 78или 66 соответственно вырабатываетсясигнал уровня "1".В регистры 8-11 записываются кодыусловий, по которым отладка должнаначаться, а также условия окончанияотладки. В соответствии с этими условиями на единичном выходе триггера 2554 вырабатывается сигнал режима. Врежиме отладки этим сигналом блокируется блок 1 постоянной памяти, включается блок 7 оперативной памяти(через элемент И 87), этот же сигналблокирует работу дешифратора 24,Перейдя в режим отладки, микропроцессор начинает отработку программы, загруженной в блок 12 оперативной памяти отлаживаемых программ, либо находящейся в памяти ОМУ(в зависимости от...
Устройство автоматического контроля каналов связи

Номер патента: 1721829
Опубликовано: 23.03.1992
Авторы: Бороденко, Подзубанов, Рудой, Синица, Чаплыгин
МПК: H04B 3/46
...и на первый управляющий вход шестого блока 6 коммутации. В последнем закрывается информационный вход, а в пятом блоке 5 коммутации открывается информационный вход. Тактовые импульсы от генератора 35 импульсов через коммутатор 5 начинают поступать на вход записи регистра 37, сигналы с выхода первого компаратора 26 записаны в регистр 37,Следующий за сигналом вещания контрольный сигнал с выхода блока фильтров поступает на вход первого детектора 7, с выхода которого продетектированный контрольный сигнал проходит на управляющий вход ключа 22, вход линии задержки и через второй АЦП 25 на второй вход второго цифрового компаратора 27, на первый вход которого поступает сигнал от второго генератора 29 чисел, сигнал которого соответствует...
Устройство для определения оптимального периода технического обслуживания изделия

Номер патента: 1767508
Опубликовано: 07.10.1992
Авторы: Воробьев, Гришин, Доможиров, Тимофеев
МПК: G07C 3/08
Метки: изделия, обслуживания, оптимального, периода, технического
...3 черезпервый усилитель 4, коэффициент усиления которого равен Сс, поступает на вход второго сумматора 5. Значение сигнала С 7 ъ + +СЛ с выхода второго сумматора 5 посту пает на вход первого блока 7 деления и навход третьего сумматора 9. Значение сигнала Сф 1 ф + Сото + Сд Рп с выхода третьего сумматора 9 поступает на вход второго блока 10 деления, Значение сигнала Й(т) = 50 =Я/Сфсф + Сто + Сп тп), соответствующеечислу сеансов контроля и ТО, которое можно выполнить на изделии с заданным ограниченным ресурсом В, если обслуживание проводить с периодом с, с выхода второго 55 блока 10 деления поступает на вход четвертого элемента 20 памяти, Значение сигнала Сд(т) = СЛ+ Сп 7 п)/сф с выхода первогоблока 7 деления поступает на вход...
Устройство для моделирования асинхронного двигателя

Номер патента: 526925
Опубликовано: 30.08.1976
Авторы: Больдижар, Закривидорога, Стражмейстер
МПК: G06G 7/62
Метки: асинхронного, двигателя, моделирования
...15 20 25 30 35 40 45 ни скорости двигателя, поступает на вход блока 4, в котором преобразуется в напряжение, пропорциональное частоте вращения общего вала. С выхода блока 4 напряжение подается на вход блока 7, где преобразуется ,в напряжение, пропорциональное скольжению второй ступени скорости двигателя при работе первой ступени скорости. С выхода блока 7 напряжение через замкнутый ключ 11 поступает на вход задания начальных условий блока 2 моделирования скольжения второй ступени скорости, причем этот блок находится в состоянии готовности к работе.Для моделирования электромеханических процессов при переключении двигателя с первой ступени скорости на вторую ступень второй выход блока управления подключается к управляющим входам блока 2...
Предыдущий патент: Способ измерения угловой скорости вращения вала пневмомотора с камерами выхлопа и выталкивания
Следующий патент: Устройство для измерения нестабильности частоты вращения вала
Случайный патент: Проволочный переленный резистор