Устройство для ввода в эвм и вывода из эвм информации о пространственной конфигурации объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1003061
Автор: Малиновский
Текст
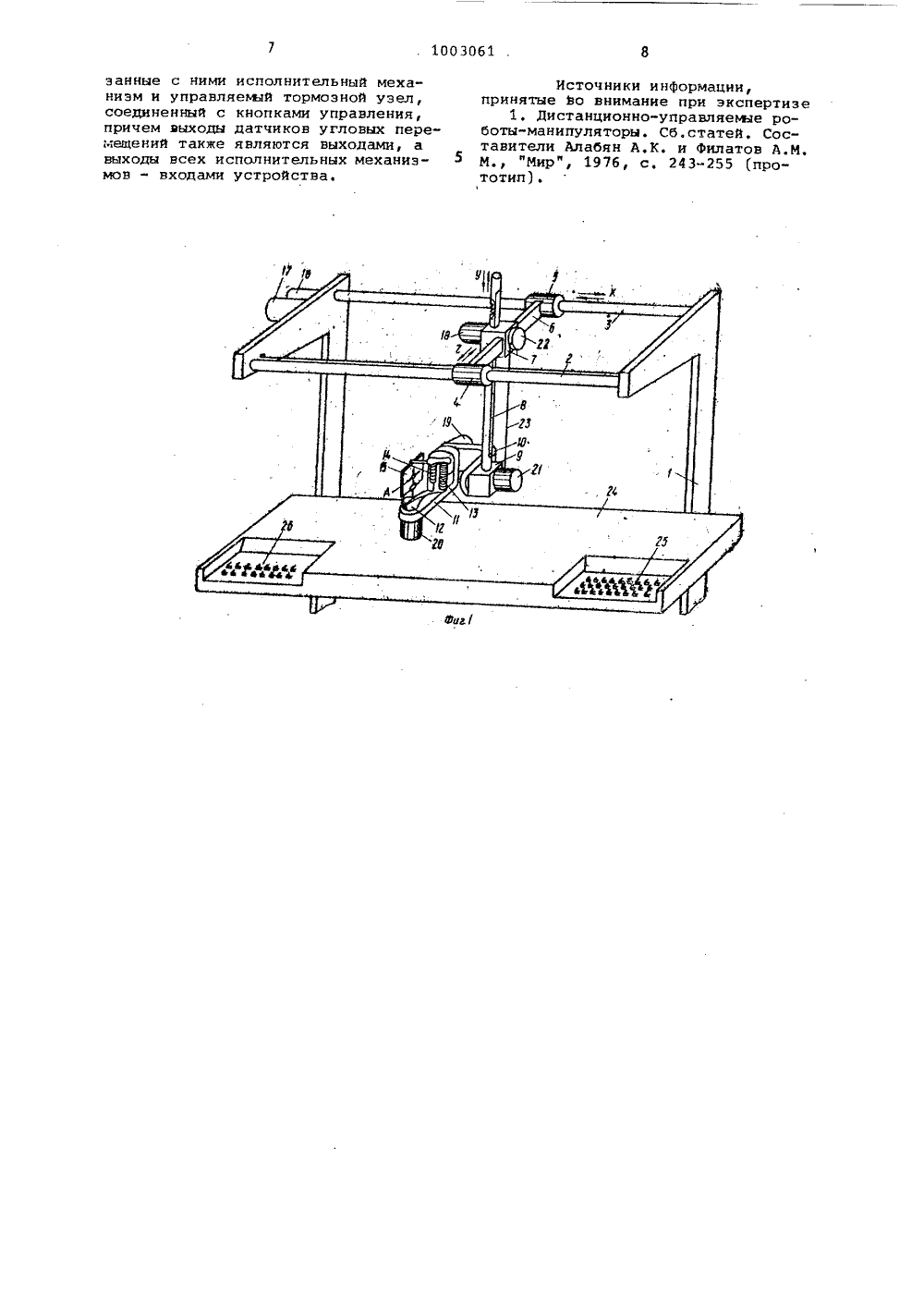
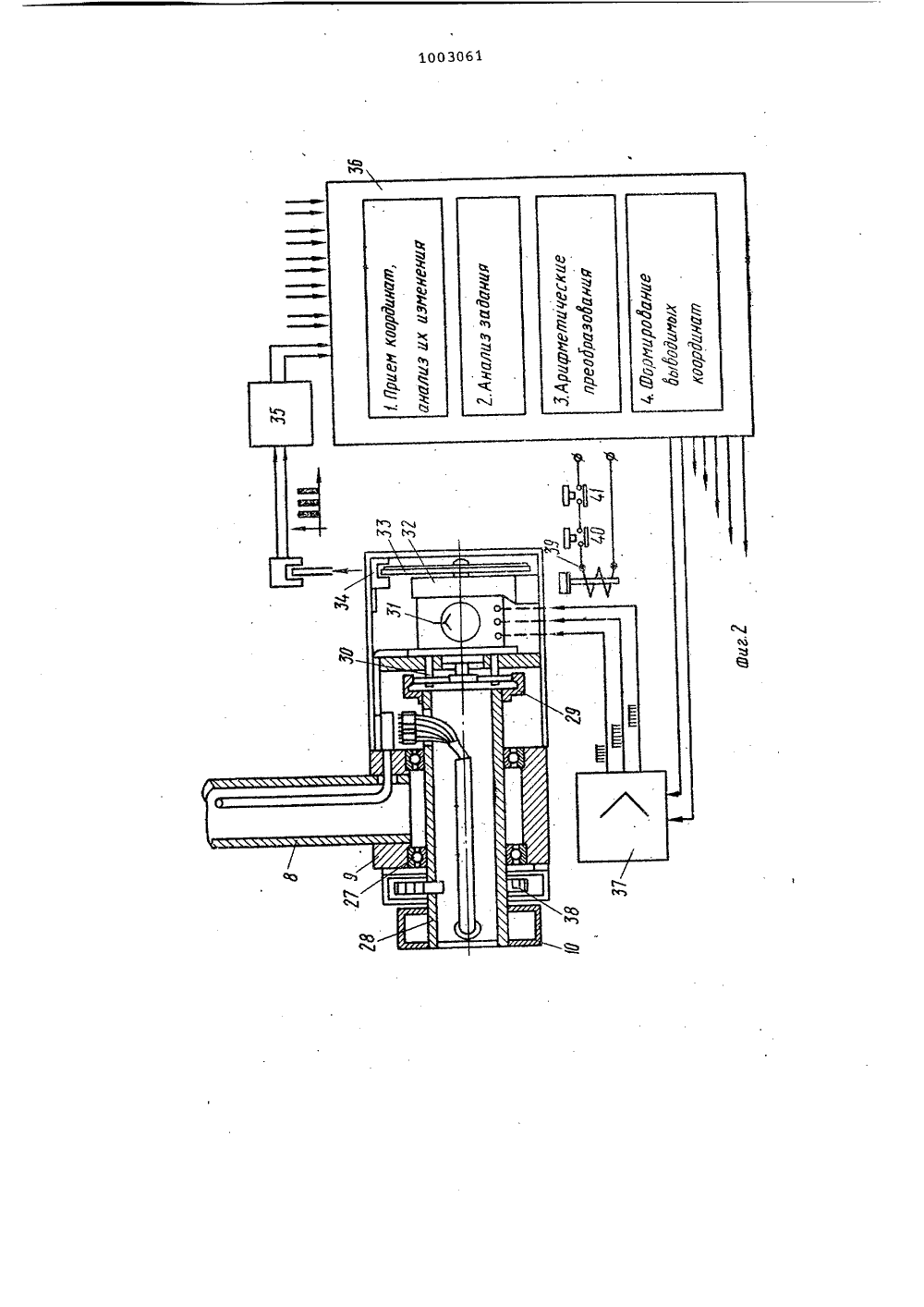
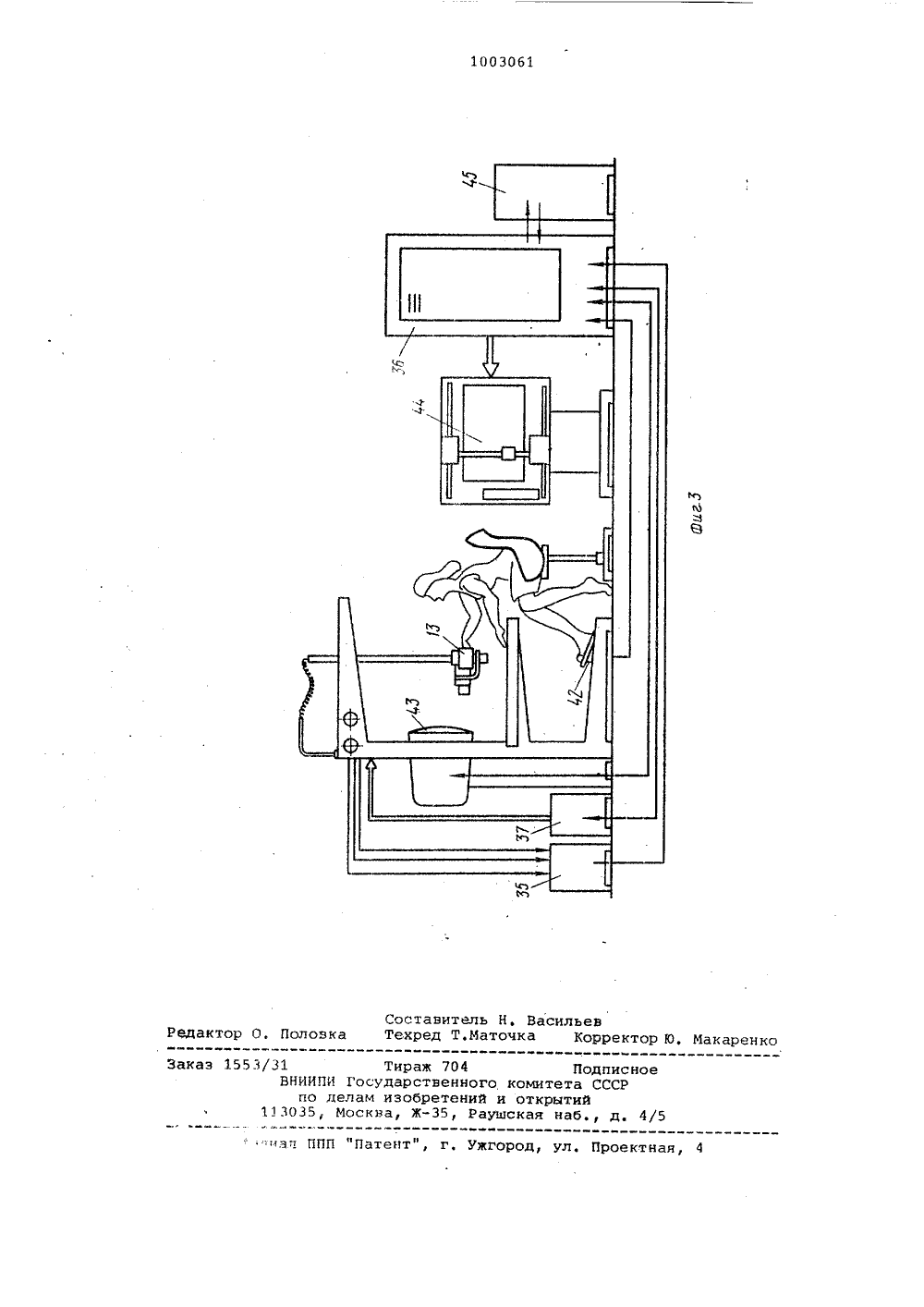
Союз Севетскик Социалистическиз Республик(22) Заявлено 14 Р 878 (21) 2648502/18-24с присоединением заявки Мо(23) ПриоритетОпубликовано 0 70 3 8 3. Бюллетень М 9Дата опубликования описания 070383 3) М. Кл.з С 06 Р 3/03 Государственный, комитет СССР но делам изобретений и открытий(54) УСТРОЙСТВО ДЛЯ ВВОДА В ЭВМ И ВЫВОДА ИЗ ЭВМ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОЙ КОНФИГУРАЦИИ ОБЪЕКТАИзобретение относится к перифе- рийному оборудованию ЭВМ и предназначено для автоматизации процессов ввода в ЭВМ и вывода из ЭВМ специальной информации, связанной с конструированием пространственных объектов.Известно устройство, предназначенное для ввода в ЭВМ информации о пространственном положении. неко . торых точек, принадлежащихповерхностям конструируемых пространственных объектов,. содержащее рукоятку, связанную с тремя датчиками линейных перемещений 111.Недостатком известного устройст ва является низкая производительность, обусловленная тем, что при вводе информации в ЭВМ в случае возникновения необходимости ввода координат некоторой плоскости оператор вынужден последовательно вводить координаты принадлежащих этой плоскости трех точек, Кроме того, известное устройство не предназначено для вывода информации о пространственной конфигурации объекта.Целью изобретения является повышение производительности и удобства работы оператора. Указанная цель достигается тем,что в устройство для ввода в ЭВМи вывода иэ ЭВМ информации о пространственной конфигурации объекта,содержащее рукоятку с кнопкамиуправления и три датчика линейныхперемещений, выходы которых являются выходами устройства, введенаподвижная по трем линейным координатам платформа, механически связанная с-.датчиками линейных перемещений по каждой степени ее подвижности, на платформе установлентрехстепенной угловой шарнир, механически соединенный с датчиками угловых перемещений по каждой иэ степеней его подвижности, к которомужестко присоединена пластина длявизуализации вводимой и выводимойинформации,.причем центр пересечения осей трехстепенного угловогошарнира совмещен с точкой платфорыя, три линейные пространственныекоординаты которой вводятся. в ЭВМ,и одновременно лежит на плоскостипластины, с которой соединена рукоятка, по каждой из степеней подвижности платформы и трехстепенногоуглового шарнира установлены мехаЗ 0 нически связанные с ними исполни 1003061тельный механизм и управляемый тормозной узел, соединенный с кнопками управления, причем выходы датчиков угловых перемещений также являются выходами, а входы всех исполнительных механизмов - входами устройства,На фиг. 1 изображено устройство,на фиг. 2 - схема соединения этого,устройства с ЭВМ; на фиг, 3 - пример использования устройства дляввода в ЭВМ и вывода иэ ЭВМ информации о пространственной конфигуРации объекта в составе системыавтоматизированного конструирования.устройство состоит из несущейрамы 1, на которой установлены направлякщие 2 и 3, вдоль которых наопорах 4 и 5 перемещается траверсаб (координата Х). Вдоль траверсы бскользит каретка 7 (координата 2),по которой перемещается вертикальныйстержень 8 (координата У).К нижнему концу стержня 8 присоединена подвижная платформа 9, несущая трехстепенной угловой шарнир,состоящий изшарнирно соединенныхГ-образных рычагов 10 и 11 (координаты Ч и 9), На рычаге 11 шарнирнозакреплена стойка 12 (координата%1 ),ккоторой жестко присоединена рукоятка 13 с кнопками 14 управления ипластиной 15 для визуализации вводимой и выводимой информации.Соответствующие каждой иэ степе.ней подвижности устройства, т.е.каждой иэ вводимых или выводимых 35координат, датчик перемещений, исполнительный механизм и тормознойузел могут. быть выполнены в видеединого блока, Всего в устройствеимеется шесть таких блоков, Для 4 Окоординат Х и 2 на раме 1 установлены блоки 16 и 17, механическисвязанные, например, с помощью тросового привода, с траверсой б и.кареткой 7 (тросы и их запасовка 45не показаны). Для координаты У накаретке 7 установлен аналогичныйблок 18, Измерение, Фиксация и изменение угловых координат 91, 9. и.Йосшествляются с помощью установленных на рычагах 10 и 12 и на подвиж-ной платформе 9 блоков соответственно 19, 20 и 21.Для уравновешивания веса подвижнойплатформы 9 с установленным на нейоборудованием на каретке 7 установлено специальное разгрузочное устройство 22, представляющее собой, например, спиральную пружину с предварительным натягом, удерживающее платформу с помощью тросика 23.Кроме того, к раме 1 присоединена плоскость рабочего стола 24, содержащего пульт 25 для управления ЭВМ и пульт 26 для управления вводом и выводом информации.65 Пример конкретного выполнения блс,ка, содержащего датчик перемещений,исполнительный механизм и тормознойузел, а также схема его подключенияк ЭВМ представлены на фиг, 2, причемдля примера выбран блок, соответствующий координате ЧВ корпусе подвижной платформы 9на подшипниках 27 установлен полыйвал 28, к одному иэ концов которогожестко присоединен Г-образный рычаг10, а к другому - шестерня 29, связанная через редуктор 30 с исполнительным механизмом 31, выполненным, например, в виде шаговогоэлектродвигателя, На валу исполнительного механизма 31 установлен также электрически управляемый тормознойузел 32 и диск 33 датчика 34 угловыхперемещений, подключенного через преобразователь 35 к одному иэ входовЭВМ 36. Соответствующий выход ЭВМчерез усилитель 37 соединен с входомисполнительного механизма 31,для разгрузки руки оператбра от восприятия момента от неуравновешенных сил собственного веса элементов устройства между платформой 9 и валом 28 встроена предварительно напряженная спиральная пружина 38.Управляющая катушка 39 тормозного узла 32 подключена к источнику питающего напряжения через последовательно соединенные нормальнозамкнутые кнопки 40 и 41 управления, первая иэ которых связана с рукояткой 13 (фиг. 1), а вторая, общая для всех тормозных узлов - с педалью 42 (фиг, 3).Общая схема включения устройства в аппаратурный комплекс, предназначенный для работы оператора на ЭВМ в ди алоговом режиме, например, при выполнении работ по автоматизированному конструированию, приведена на Фиг,З. Здесь оператор находится непосредственно перед устройством , причем его правая рука находится на рукоятке 13, Для наблюдения за картиной сформированного пространственного объекта перед оператором установлен графический дисплей 43, а для получения твердой копии изображения - графопостроитель 44. ЭВМ 36 включает в комплект внешние запоминакщие устройства 45.Работа с помощью устройства ввода- вывода производится следующим образом.Оператор, отключив с помощью необходимой кнопки (или кнопок) 40, 41 торможение по выбранной координате с помощью рукоятки 13 перемещает плас- тину 15 в нужное пространственное положение. При этом пластина выступает в качестве материального объекта виэуалиэирующего для оператора пространственное положение плоскости., ограничивающей объем конструируемогообъекта. Одновременно изменение положения плоскости в пространстве оператор может просматривать по ее следам на координатных осях на экране графического дисплея 43.Выбрав необходимое положение плас-. 5тины 15, оператор освобождает кнопку управления тормозным узлом, соответствующий исполнительнь;Л механизм сто- порится и показания датчиков перемещения считываются в память ЭВМ 36, 10Весь процесс конструирования объекта (детали, узла) выполняется последовательным перемещением оператором пластины 15 в нужное положение и заданием соответствующим программным 15 средствам ЭРМ 36 необходимых указаний по фиксированию заданных плоскостью координат и определению линий, образующихся при пересечениивведенных плоскостей, а также объединению (или разделению) ограниченных введенными плоскостями объемов,При необходимости ввода цилиндрических поверхностей оператор ука-. зывает программным средствам какую иэ осей (Х,У или 2) необходимо принять в качестве оси цилиндра и дополнительно задает его радиус,Процесс вывода информации на устройство выполняется следующим образом, Оператор дает программным средствам указание о том,. какую из сформированных в процессе конструирования плоскостей, ограничивающих пространственный объект, он желает вывести на устройство, после чего, З 5 освободив с помощью выбранной кнопки или педали 42 соответствующие тормозные узлы, перемещает пластину 15 приблизительно в направлении сближения с выводимой плоскостью, 40Программные средства обеспечивают в этот период .,вычисление длины перпендикуляра, опущенного иэ точки А пластины координаты точки А Фиксируются датчиками, входящими в бло ки 16 - 21) на выводимую плоскость, координаты которой хранятся в памяти ЭВМ. Программные средства обеспечивают разложение текущей длины пер.пендикуляра на составляющие вдоль всем осей координат и при приближении фактичеекой длины каждой из составляющих перпендикуляра к некоторому заданному допуску включают реализованную программными средствами систему обратной связи, которая через 55 преобразователь 35 подает управляющие сигналы на исполнительные механизмы в блоках 16-21. Последние обеспечивают перемещение пластинй 15 в заданное положение до тех пор, пока 60 зафиксированное датчиками фактическое положение пластины и вычисленное не сравнятся.Описанный процесс происходит одновременно по всем координатам Х, У, 2,65 Ф;, Ф, Ч и в конечном счете пластина 15 займет положение, определяемое координатами выводимой нз ЭВМ плоскости, т,е.обеспечит пространственную визуализацию - вывод этой плосскостиПоскольку в предлагаемом устройстве оператору представляется воэмож-ность нечнслового диалога с ЭВМ, при котором, перемещая пластину в нужное положение, оператор имеет воэможность вводить одновременно шесть координат, время, необходимое для ввода информации, сокращается в 3-5 раз по сравнению с известными способами.Аналогичное сокращение времени происходит при выводе координат. Смеете с тем возможность нечислового вывода путем автоматической установки пластины в положение, соответствующее выводным координатам, исключает ошибки, возможные в процессе конструирования пространственных объектов, в тех случаях, когда необходимо осуществить припасовывание поверхностей конструируеьих объектов.Сокращение затрат времени на процесс обмена и уменьшение возможных ошибок обеспечивает повышение производительности труда и удобства работы сепаратора.Ф,Формула изобретенияУстройство для ввода в ЭВМ и вывода иэ ЭВМ информации о пространственной конфигурации объекта, преимущественно для систем автоматизированного конструирования, содержащее рукоятку с кнопками управления и три датчика линейных перемещений, выходы которых .являются выходами устройства, о т л и ч а ющ е е с я тем, что, с целью повышения проиэводительцости и удобства работы оператора, в устройство введена подвижная по трем линейным координатам платформа, механически связанная с датчиками линейных перемещений по каждой степени ее подвижности, на платформе установлен трех- степенной угловой шарнир, механически соединенный, с датчиками угловых перемещений по каждой иэ степеней его подвижности, к которому жестко присоединена пластина для визуализации вводимой и выводимой информации, причем центр пересечения осей трехстепенного углового шарнира совмещен с точкой платформы, три линейные пространственные координаты которой вводятся в ЭВМ, и одновременно лежит на плоскости пластины, с которой соединена рукоятка, по каждой из степеней подвижности платформы и трехстепенного углового шарнира установлены механически свя1003061 Фиг эанныеанные с ними исполнительный механизм и управляежй тормозной узел, соединенный с кнопками управления, причем выходы датчиков угловых перемацений также являются выходами, а выходы всех исполнительных механизмов - входами устройства. Источники информации,принятые во внимание при экспертизе1, Дистанционно-управляете роботы-манипуляторы. Сб.статей. Составители Алабян А,К. и Филатов А.М.5 М "Мир", 197 Б, с, 243-255 (прототип).10030 б 1 Составитель Н. ВасильевТехред Т.Маточка Корректор Ю. Макаренко Поло едакто аказ 1553/3/5 ент", г. Ужгород, ул. Проектн цал ППП ВНИИПИ Г по дел 3035, Мо
СмотретьЗаявка
2648502, 14.08.1978
ВСЕСОЮЗНОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ВНИИСТРОЙДОРМАШ"
МАЛИНОВСКИЙ ЕВГЕНИЙ ЮРЬЕВИЧ
МПК / Метки
МПК: G06F 3/03
Метки: ввода, вывода, информации, конфигурации, объекта, пространственной, эвм
Опубликовано: 07.03.1983
Код ссылки
<a href="https://patents.su/6-1003061-ustrojjstvo-dlya-vvoda-v-ehvm-i-vyvoda-iz-ehvm-informacii-o-prostranstvennojj-konfiguracii-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для ввода в эвм и вывода из эвм информации о пространственной конфигурации объекта</a>
Устройство для сопряжения устройств ввода-вывода с цвм

Номер патента: 736083
Опубликовано: 25.05.1980
Авторы: Запольский, Иванов, Кардаш, Костинский, Мойса, Орлова
МПК: G06F 3/04
Метки: ввода-вывода, сопряжения, устройств, цвм
...блок 20 производит выборку УВВ, передает ему команду и обеспечивает ее выполнение. Одновременно с этим блок 4 производит увеличение содержимого счетчика адреса б на единицу, в результате чего в счетчике адреса получается адрес управляющего слова для переданной команды, После 15 этого управляющий блок 4 вырабатывает сигнал, который поступает по режимной шине 25 в канал 27 и устанавливает там границы обмена согласно управляющему слову канальной програм мы. Необходимый для этого адрес управляющего слова поступает из счетчика б адреса через блок 2 для прямого доступа в память по шине 3 ацреса а режим ввода-вывода опраши 25 вается каналом 27 в блоке 4 посре,цством режимной шины 25. Информация, определяющая режим обмена, поступает в...
Устройство для сопряжения процессора с устройствами ввода вывода

Номер патента: 1456964
Опубликовано: 07.02.1989
Автор: Тетенкин
МПК: G06F 13/24
Метки: ввода, вывода, процессора, сопряжения, устройствами
...либо 45 получив сигнал прерывания на выходе28 прерываний устройства (режим работы по прерываниям), либо путем опроса порта состояния устройства (режим опроса),считывает содержимое трнг.гера 72 регистра 6 и триггеров 74и 75 регистра 7.При реализации ввода слова информации иэ устройства ввода-вывода пос.леднее Формирует на входе 32 слово 55 информации, а на входе 33 - комбинацию управляющих сигналов, котораячерез выход 26 регистра 6 транслируется на входы узлов О и 3, При этом, на выходе узла 3 в интерфейс процес 5 10 15 20 25 30 на управляющих сигналах хранится в постоянной памяти 80 узла 10.При реализации вывода слова информации в устройство ввода-вывода процессор осуществляют вывод слова информации в порт вывода устройства, при этом...
Устройство ввода-вывода синхронной двоичной информации в цифровые тракты

Номер патента: 1374438
Опубликовано: 15.02.1988
Метки: ввода-вывода, двоичной, информации, синхронной, тракты, цифровые
...28, формирователь 10 служебной кодовой группы содержит элементы И 29-43, первый элемент НЕ 44, сумматор по модулю два 45, эле- мент ИЛИ 45, второй элемент НЕ 47, шестнадцатый элемент И 48, семнадцатый элемент И 49, блок 16 приема рекурренты содержит входной регистр 50, элемент 51 сравнения, датчик 52 эталонной ПСП, элемент 53 задержки, буферный регистр 54 сдвига, дешифратор 15 служебной кодовой группы содержит элемент 55 сравнения, первый элемент И 56, дешифратор 57 состояний, первый элемент ИЛИ 58, сумматор 59 по модулю два, второй элемент И 60,второй элемент ИЛИ 61, третий элемент И 62, блок 8 коррекции сверхцикла содержит первый элемент И 63, первый элемент ИЛИ 64, второй элемент И 65, первый счетчик 66, дешифратор 67 нуля, третий...
Устройство ввода-вывода

Номер патента: 781803
Опубликовано: 23.11.1980
Авторы: Аптекарь, Дехтяренко, Заславский, Нефедченко, Щередин
МПК: G06F 3/04
Метки: ввода-вывода
...выполняется операция чтения,байт данных принимается с шин 22 насоответствующий вход первого элемента ИЛИ 11 и затем помещается в блок7 буферных регистров, следующий байтпомещается в регистр 7 к т,д. Буферные регистры используются по кольцевому принципу - после заполнения регистра 7 вновь используется регистр71, если он к этому времени освобождается. Параллельно с накоплениемв буферных регистрах данные черезвторой элемент ИЛИ 12 передаютсядальше в регистр 3, где Формируетсяслово для записи в оперативную память. Выдача байтов иэ блока 7 буФерных регистров происходит н порядке их поступления кз внешнего устройства (сначала считывается первый байт иэ регистра 7 и т.д.), Блок б управления следит эа расположением данных в блоке 7 буферных...
Устройство ввода-вывода кассет магнитофона

Номер патента: 1027773
Опубликовано: 07.07.1983
Авторы: Валеев, Головатый, Когут
МПК: G11B 23/04
Метки: ввода-вывода, кассет, магнитофона
...относительно шасси основание с пазами, рамку, размещенную с возможностью возвратно-посту,пательного движения в укаэанных пазах, 45захват о Фкксирукшими ролкками, подпружиненный относительно шасси, ивозвратные пружины, один конец каждой из которых закреплен на подвижномосновании, а другой на шасси, снабже-оно сопряженным с подвижным основанием рычагом, один конец которого шарнирно закреплен на шасси, а другойвхог,ит в зацепление рамкой.Предпочтительным является выполнение рамки с закрепленной иа нейпружинной скобой с возможностью коктактироваиия ее внутренней поверхности с кассетой,На Фкг. 1 показано исходное положение кассеты и устройства ввода"вы фвода прк заправке) на Фкг. 2 - устройство ввода"вывода,вид сверху) яаФиг, 3 - то же,...
Предыдущий патент: Клавиатура
Следующий патент: Многоканальное устройство коммутации магистралей управляющей вычислительной системы
Случайный патент: Способ самообращения волнового фронта