Шаговый конвейер
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 943148
Автор: Коломысина





Текст
(72) Автор изобретени Коломысин торское техиол чному оборудо скохоэяйстэени ССРоею ческ Специализированное проектно-конструкбюро по холодноштамповочному и свароМинистерства тракторного и сельмашиностроения С(71) Заявнтед го ВЕЙЕ 54 ШАГОВЬ Изобретение относится к пойъемнотранспортному машиностроению, в частности к шаговым конвейерам.Известен шаговый конвейер для транспортирования штучных грузов, включающий рабочий орган, совершающий возвратно-поступательное движение посредством механического привода, и подъемные устройства, выполненные в виде прорезиненных надувных рукавов и обеспечивающие подъем груза при обратном движении рабочего органа 1,Недостатки известного шагового кон. вейера заключаются в следующем, Выполнение механизма пойъема. в виде прорезиненных рукавов не обеспечивает достаточной высоты подъема изделия или приспособления-спутника с изделием, что приводит к необходимости снабжения обрабатывающего оборудования дополнительными подъемными устройствами, Увеличение же высоты эа счет увеличения диаметра рукавов ведет к снижению производительности. Кроме того, прорезиненные изонх перемерукава не обладают достаточной жесткостью и долговечностью.Наиболее близким техническим решением к изобретению является шаговыйконвейер, содержащий подвижную раму сприводами ее вертикального и гортального возвратно-поступательныщений, неподвижную раму, механизмыподъема, выполненные из двух реек, одна иэ которых связана с направляющейподвижной рамы, а другая - с площадкойдля укладки, изделий 23.Недостатками этого шагового конвейера являются сложность конструкции,низкая производительность из за излишнихперемещений подвижной рамы и возвратаее в исходное положение только послеокончания цикла обработки.Цепь изобретения - упрощение конст 2 о рукции и повышение эффективности,Указанная цель достигается тем, чтов шаговом конвейере, содержащем неподвижную раму, подвижную раму с приводами ее вертикального и горизонтального3 94314возвратно-поступательных перемещений,механизмы подъема, выполненные иэ двухреек, одна из которых связана с направляющей подвижной рамы, а другая - сплощадкой для укладки изделий, неподвиж-ная рама снабжена кронштейном с направляюшими, при этом рейки механизма подьема расположены в вертикальной плоскости, установлены в направляющих и связаны между собой посредством промежуточной шестерни,Кроме того, с цепью обеспечения ориентированной подачи иэделий в зону обработки, конвейер имеет горизонтальную направляющую, установленную нв подвижной раме, и связанную с одной из реекпосредством пальца с роликом.На фиг, 1 изображен шаговый конвейер, общий вид (для наглядности некоторые детали не показаны); на фиг. 2 -подвижная рама с приводами вертикального и горизонтального перемещений; нафиг. 3 - механизм дпя подъема изделийв зону обработки с частью подвижнойрамы; на фиг. 4 - механизм вертикального подъема подвижной рамы, при покожении механизмов и изделия в момент обработки; на фиг. 5 - то же, при положении механизмов и иэделия в момент леремешения его на швг; нв фиг, 6 - циклограмма работы конвейера.Шаговый конвейер содержит эстакаду1 с обрабатывающими механизмами 2,подвижную раму 3 неподвижную раму 4,на которой закреплены механизмы подьема изделий 5 и механизм вертикального Зфподъема 6 подвижной рамы 3, Загрузочная площадка 7 для подачи иэделий 8 наконвейер и загрузочная площадка 9 дпясъема обработанных изделий установкены также на подвижной раме 3.Подвижная рама с приводами (Фиг. 2)состоит из корпуса 10 рамы, которыйопирается на ролики 11, цилиндра 12 вертикального подъема рамы, рычагов 13,цилиндра 14 горизонтального перемещения рамы, тяги 15, роликов 16 горизонтальных направляющих 17, расположенныхс обеих сторон корпуса 10 рамы, и установочных площадок 18 для размещенияиэделий 8, ИМеханизм подъема изделий в зону обработки 5 состоит (см. фиг. 3) иэ кронштейнов 19 с направляющими 20 и 21,реек 22 и 23, связанных между собойпромежуточной шестерней 24. Пальцы сроликами 25 кинематически связывают рейки 22 с направляющими 17 подвижнойрамы 3, в рейки 23 соединены с уста 8 ановочными площадками 26, на которыеложится изделие 8. Кронштейны 19 жестко закреплены на неподвижной раме 4,попарно нв каждой технологической позиции.Механизм вертикального подъема 6подвижной рамы 3 состоит (см, фиг. 4)из кронштейна 27 с вертикальной направляющей 28 и пальца с роликами 29, кинематически связывающего вертикальнуюнаправляющую 28 с горизонтальной направляющей 17 подвижной рамы 3. Кронштейн 27 также жестко закреплен на неподвижной раме 4,Шаговый конвейер работает следую-.щим образом,В исходном положении подвижная рама 3 находится в крайнем нижнем и крайнем левом положении, что соответствуетточке "0" на циклограмме, При вкшочении цилиндра 12 шток его приводит вдвижение рычага 13 и через ролик 11поднимает в верхнее положение подвижную раму 3, что соответствует точке1" программы.При этом все иэделия 8, в том чиспеи с загрузочной площадки 7, окажутсяна площадках 18 подвижной рамы. Причем, с .цепью обеспечения ориентированного и точного приема обрабатываемыхизделий на установочные площадки 18подвижной рамы 3 и последующей их точной передачи на площадки 26 подъемныхмеханизмов 5, подвижная рама поднимается вверх вертикально по направляющей28 кронштейна 27. Тяга 15 в этот момент скользит между роликами 16.После достижения рамой 3 конечноговерхнего положения включается в работуцилиндр 14, Тяга 15 давит на ролик 16и толкает подвижную раму вправо до крайнего положения (фиг. 2), причем пальцы25 и палец 29 скользят по горизонтальным направляющим 17 подвижной рамы.В результате изделия 8 перемешаютсянв шаг над установочными плошадками26 подъемных механизмов, что соответствует точке "2" циклограммы. Поскедостижения подвижной рамой крайнего положения отключается цилиндр 12 и подвижная рама под собственным весом начинает опускаться до нижнего исходногополокения, В этот момент пальцы 25,воспринимая давление со стороны горизонтальных направляющих 17 подвижнойрамы, заставляют перемешаться вниз рейки 22, которые, вращая промежуточныешестерни 24, придают вертикальное движение вверх рейкам 23 с установочными5 943площадками 26, В первоначальный момент установочные площадки 18 и 26движутся навстречу друг другу, в момент,когда они находятся на одном уровне, изделия 8 перехватываются на установочные площадки 26, с установочных площадок 18 подвижной рамы, поспе чего онирасходятся и принимают положение, указанное на фиг. 4,В этот момент подвижная рама 3 находится в крайнем нижнем положении, амеханизмы для подъема обрабатываемыхизделий - в крайнем верхнем положении;что соответствует точке ф 3" циклограммы, Иэделия поданы в зону обработки,В тот момент, когда обрабатываемыеизделия переходят с установочных площадок 18 подвижной рамы на установочныеплощадки 26 ждъемиых механизмов 5,иэделие, прошедшее весь цикл обработки,остается на разгрузочной площадке 9(фиг. 1),После подачи издейий 8 к обрабатывающим механизмам 2 начинается их обработка, а подвижная рама 3 с помощьюцилиндра 14 возвращается влево, в исходное положение, что соответствует точке"0 ликлограммы.С окончанием обработки иэделий вновьвключается цилиндр 12, и подвижная ра. ма поднимается вверх, принимая на своиплощадки 18 изделия 8 от,обрабатывающих механизмов 2 и с загрузочной площадки 7 д,алее цикл работы шаговогоконвейера повторяется,Расположение обеих реек подъемныхмеханизмов в вертикальной. плоскости иих связь между собой через промежуточную шестерню позволяют упростить конструкцию. Конструкция подъемных мехаЮнизмов позволяет также повысить произ водительность конвейера. Благодаря на 148 бличию механизма вертикального цодъема в шаговом конвейере, осуществляется более точная передача изделий с загруэоч ной площадки на установочные площадки подвижной рамы и с установочных площадок рамы на установочные площадки подъемных механизмов.ф ормупа изобретения1, Шаговый конвейер, содержащий неподвижную раму, подвижную раму с дриводами ее вертикального и горизонтального возвратно-поступательных перемещений, механизм подъема, выполненные издвух реек, одна иэ которых связана с направляющей подвижной рамы, а другаяс площадкой для укладки иэделий, о тл и ч а ю щ и й с я тем, что, с цепьюупрощения конструкции и повышения эф.фективности, неподвижная рама снабжена кронштейном с направляющими, приэтом рейки механизма подъема расположены в вертикальной плоскости, установлены в направляющих и связаны междусобой посредством промежуточной шестерни2, Конвейер по п. 1, о т л и ч а ющ и й с я тем, что, с целью обеспечения ориентированной подачи изделий в зону обработки, он имеет горизонтальнуюнаправляющую, установленную на подвижной раме и.связанную с одной иэ реекпосредством пальца с роликом..Источники информации,приня.ые во внимание при экспертизе1, Авторское свидетепьство СССР153226, кл. В 65 С 25/04, 1962.2. Авторское свидетельство СССР позаявке2802384/03,кл, В 65 6 25/04, 1979 (прототип)943148 2 17 Составитеиь Г. Мапышкоерсияннева Техред Л.Пекфь Кор рМ. Кос едактор 4999/27 Тираж 977 ВНИИПИ Государственного по депам изобретений и 113035, Москва, Ж, РауПодпис комитета ССС открытий шская наб., д, лиан ППП "Патент", г, Ужгород, уи. Проектная, 4
СмотретьЗаявка
2828654, 10.08.1979
СПЕЦИАЛИЗИРОВАННОЕ ПРОЕКТНО-КОНСТРУКТОРСКОЕ ТЕХНОЛОГИЧЕСКОЕ БЮРО ПО ХОЛОДНОШТАМПОВОЧНОМУ И СВАРОЧНОМУ ОБОРУДОВАНИЮ МИНИСТЕРСТВА ТРАКТОРНОГО И СЕЛЬСКОХОЗЯЙСТВЕННОГО МАШИНОСТРОЕНИЯ СССР
КОЛОМЫСИНА ЗИНАИДА ИВАНОВНА
МПК / Метки
МПК: B65G 25/02
Опубликовано: 15.07.1982
Код ссылки
<a href="https://patents.su/5-943148-shagovyjj-konvejjer.html" target="_blank" rel="follow" title="База патентов СССР">Шаговый конвейер</a>
Приспособление для подъема валков машины вертикального вытягивания стекла

Номер патента: 95852
Опубликовано: 01.01.1953
Авторы: Бромлей, Луконин, Мостович
МПК: C03B 15/00
Метки: валков, вертикального, вытягивания, подъема, стекла
...плечо ВсздеистВует кажимной винт, благодаря чему осуществляется подъем Переднего плеча, а следовательно, и валка.На чертеже изображен предлагаемый двуплечий рычаг. строите ыы,Спубтн;овано в БораетК раме 1 шахтного оокового люка маш:1 ны вертикального вытягивания стеклрнкрепле:ы бОлтаз 1 п 2 крслштсии 3, часть 4 котсрогс входит в шахту и иссст ось с поворота двуглеего рычага б- - 7 первого рода. Его ирсднес плечо 6 несет иа своем копце рорик 8, пОзнобя 10 щиЙ произВо;1 ить Осегое презе:цение. В пилиВе крси 1 нтеЙиа сг с:.баланс Отвезст 1 е с пезьоси для пажимпого винта 1 О котсрыи упирается В заднее плечо 7 рычага,Пс 1 лите Валка 11 сслслькс приспо- СООЛСИ С. СИ 213;ПВ 21 ОТСЯ Т 2 КИМ образом, то ролики о приходятся под смсияемь Валков...
Вертикально-замкнутый тележечный конвейер

Номер патента: 345068
Опубликовано: 01.01.1972
Авторы: Агеев, Глузман, Данилин, Ефимов, Котов, Лернер, Московский, Онищенко, Ордена, Удалов, Федотов
МПК: B65G 17/16
Метки: вертикально-замкнутый, конвейер, тележечный
...по которым свободно движутся грузонесущие те лежки 2 и направляющие 3 для тяговой цепи4 конвейера, На каждом звене тяговой цепи 4 посредством двух ригелей 5 крепится штифт 6. Каждая тележка конвейера снабукена двуплечим рычагом 7, одно плечо которого снабжено противовесом 8, а другое выполнено с пазом под штифт б. Рычаг закреплен шарнирно на раме тележки осью 9. На раме тележки установлены Г-образные упоры 10, удерживающие штифты б в пазу рычага 7, а также упор 11, взаимодействующий с противовесом 8 рычага 7 предыдущей тележки 2.На раме тележки 2 также установлены два подвижных упора 12, фиксирующие рычаг 7 с двух сторон и контактирующие посредством роликов 18 с ограничивающими направляющими 14, расположенными с двух сторон вдоль верхней...
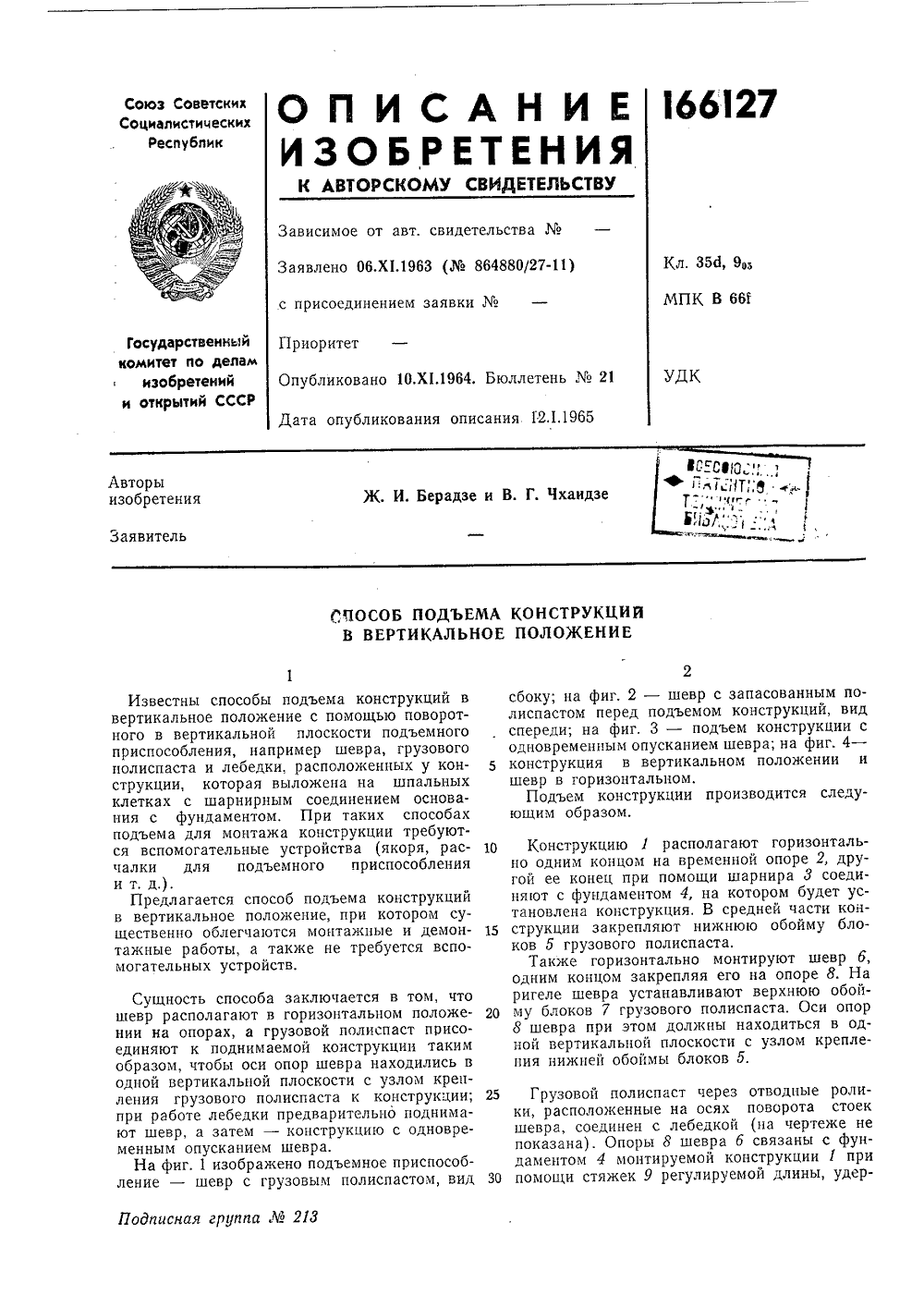
Способ подъема конструкции в вертикальное положение

Номер патента: 1289812
Опубликовано: 15.02.1987
Авторы: Ильичев, Кузнецов, Сидоров
МПК: E04H 12/34
Метки: вертикальное, конструкции, подъема, положение
...Производственно-полиграфам изобретений и открытий наб., д. 4/5Ужгород, ул. Проектная, 4 1 Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при подъеме конструкций, например цилиндрических емкостей, аппаратов колонного типа и тому подобное, в вертикальное положение. Цель изобретения - исключение использования дорогостоящего оборудования и исключение возникновения осевых усилий поднимаемой конструкции. На фиг. 1 показана поднимаемая конструкция, промежуточное и конечное (вертикальное) положения; на фиг. 2 - то же, начальное и промежуточное положения (вид сверху),На монтажную площадку 1 перед началом монтажа устанавливают винтовую направляющую 2 таким образом, чтобы фундамент 3, на который должна...
Способ подъема конструкции в вертикальное положение
Номер патента: 166127
Опубликовано: 01.01.1964
МПК: B66D 3/04, E04H 12/34
Метки: вертикальное, конструкции, подъема, положение
...положерах, а грузовой полиспаст присоподнимаемой конструкции таким обы оси опор шевра находились в кальной плоскости с узлом крепового полиспаста к конструкции; лебедки предварительно поднимазатем - конструкцию с одновресканием шевра.изображено подъемное приспособевр с грузовым полиспастом, вид ость аспо опо 25 Грузовой полисп ки, расположенные шевра, соединен с показана). Опоры даментом 4 монти30 помощи стяжек 9 роли- стоек же не фун 1 при удерт через отводныеа осях поворотаебедкой (на чертшевра б связаныемой конструкциигулируемой длины одписная группа Л 0 2 И Сущн шевр р нии на единяют к образом, чт одной верти ления груз при работе ют шевр, а менным опуНа фиг. 1 ление - ш асполагают горизонтальвременной опоре 2, друмощи шарнира 3...
Механизм подвижных передних

Номер патента: 393183
Опубликовано: 01.01.1973
МПК: B65H 1/02
Метки: механизм, передних, подвижных
...расстоянии ст приемных валиков, чтобы рашкеты могли отклоняться длч пропуска листа. Это, в свою очередь, требует значительного перемещения листа механизмом подающих присосов, что создает большие инерционные нагрузки в механизме присссозсам он а кл ада.Цель изобретения - уменьшение инерцпснных нагрузок в механизме присосов самонаклада.Достигается это тем, что в предлагаемом механизме каждый из рашкетов установлез на индивидуальной оси, перпендикулярной оси приемного валика, а для поворота,рашкетов применена общая тяга,Это позволяет очень олизко придвинуть стапель и приемному валику и резко уменьшить ход и инерциснные нагрузки механизма ведущих присосов,На чертеже изображена схема предлагаемого мехаьизма.гКаждый рашкет 1 механизма...
Предыдущий патент: Привод конвейерного поезда
Следующий патент: Устройство для автоматического адресования объекта по кратчайшему пути
Случайный патент: Самоходный погрузчик