Система управления технологическимпроцессом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
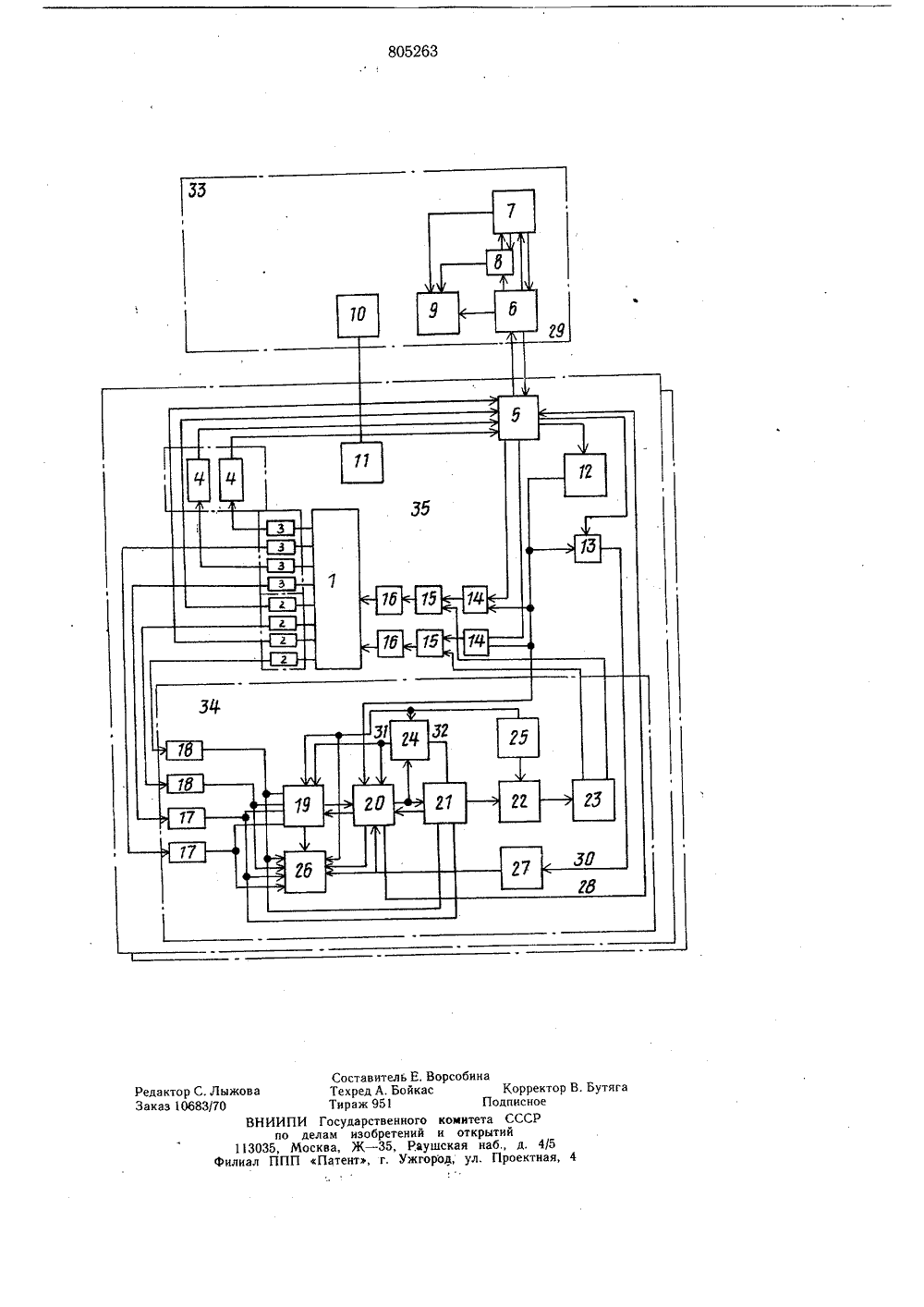
11805263 ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К .АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советски иСоциалистическихРеспубликиа делам изабретеиий и иткрытий(72) Авторы изобретен оргу 486.",, И. Груба, Ф апаяни, Э. К. Никулин и ордена Трудового Красного 3политехнический институт) СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ Изобретение относится к автоматизиро. ванным системам управления и может быть использовано при создании систем управления технологическими процессами, включающими несколько рассредоточенных объектов, управляемых по локальным и глобальному критериям эффективности в условиях, вредно влияющих на работу электронных устройств, например на гидрошахте,Известна автоматизированная система управления производственными процессами, содержащая объект управления, блок извлечения квадратного корня, блок электропневмопреобразователей, блок обнаружения отклонений, ,блок предельных отклонений, блок регистрации, блок регулирующих устройств, блок непрерывного контроля и управления оборудования, накопитель статической информации, блок буферной памяти, блок оперативного измерения, оконечный информатор, аналого-цифровой преобразователь, пульт централизованного управления, групповой задатчик дистанционного управления, групповой переключатель, групповой задатчик номинала, блок формирования вызова и обзорный информатор. Система предназначена для тройного управления,которое заключается в том, что каждымзадатчиком можно управлять по вызову -дистанционно (централизованно) с пультауправления, вручную - индивидуально (децентрализовано) в зоне переходных режимов(зона пуска и останова процесса) и с помощью цифровой вычислительной машины -машинное управление 1,Однако такая система не предназначенадля управления технологическими процессами, имеющими несколько контуров управлеО ния, разнесенных на большие расстояния,работающих в условиях, вредно влияющихна работу электронных устройств, поэтому,в этих системах не предусмотрены решения,направленные на повышение надежности системы при управлении подобными технологическими процессами.Известна также система управления,предназначенная для управления процессом,включающим несколько контуров управления, содержащая датчики, цифровую вычис 20 лительную машину, предназначенную дляпрямого цифрового управления, и локальныеустройства управления контурами технологического процесса в случае неисправностиработы вычислительной машины, переключающее устройство для переключения цепей управления на вычислительную машину либо на устройство локального управления, пульт управления с обзорным информатором, соединенным с цифровой вычислительной машиной 2).Однако известная система управления ограничивается регулированием технологических параметров в заданных пределах и не предусматривает передачу информации на большие расстояния и, как следствие этого, способы помехоустойчивости передаваемой информации, а локальные устройства управления не обеспечивают программное управление объектом.1 ель изобретения - расширение области применения и повышение надежности системы.Поставленная цель достигается тем, что в систему, содержащую первый блок связи, цифровую вычислительную машину, первый выход которой соединен с первым входом устройства индикации, и в каждом контуре управления второй блок связи, исполнительные механизмы, локальное устройство управления, первые входы которого подключены к первым выходам блока цифровых датчиков, вторые входы - к первым выходам блока аналоговых датчиков, а третий вход - к выходу переключающего устройства, введены устройство формирования средних значений параметров и в каждый контур управления - блок аналого-цифровых преобразователей, первые элементы И, второй элемент И и элементы ИЛИ, выходы которых подключены ко входам исполнительных механизмов, первые входы - к первым выходам локальных устройств управления и первым выходам первых элементов И, а вторые входы - к выходам первых элементов И, первые входы которых соединены с первым входом второго элемента и и выходом переключающего устройства, а вторые входы - с первыми выходами второго блока связи, подключенного вторым выходом ко входу переключающего устройства, третьим выходом - ко второму входу второго элемента И, четвертым выходом - к первому входу первого блока связи, первыми входами - ко вторым выходам блока цифровых датчиков, вторыми входами через блок аналого-цифровых преобразователей - ко вторым выходам блока аналоговых датчиков, третьим входом - ко второму выходу локального устройства управления, а четвертым входом - к первому выходу первого блока связи, второй выход которого соединен с первым входом устройства формирования средних значений параметров, подключенного первым выходом ко второму входу устройства индикации, а вторыми выходом и входом соответственно к первому входу и второму выходу цифровой вычислительной машины, второй вход и третий выход которой соединены соответственно с третьим входом и 5 0 15 20 25 30 35 40 45 50 55 4вторым выходом первого блока связи, выход второго элемента И подключен к четвертому входу локального устройства управления.На чертеже представлена блок-схема системы.Система содержит объект 1 управления, блок 2 дискретных датчиков, блок 3 аналоговых датчиков, блок 4 аналого-цифровых преобразователей, первый блок 5 связи, второй блок 6 связи, цифровую вычислительную машину 7, устройство 8 формирования средних значений параметров, устройство 9 индикации, устройства 10 и 11 диспетчерской связи, переключающее устройство 12, элементы И 13 и 14, элементы ИЛИ 15, исполнительные механизмы 16, субблоки 7 пороговых элементов, элементы 18 электрической развязки, блок 19 логики, блок 20 памяти, блок 21 формирования промежуточных функций, блок 22 выходных функций, блок 23 выходных усилителей, блок 24 тактов, пульт 25 управления, блок 26 сигнализации, блок 27 приема команд, линии 28- 32 связи диспетчерский пункт 33, локальное устройство 34 управления, контур 35 управления.Система работает следующим образом.Информация с объекта 1 управления от дискретных датчиков 2 и от аналого-цифровых преобразователей 4 поступает на блок 5, пересылающий информацию через протяженную линию 29 связи на блок 6 диспетчерского пункта 33 и далее на цифровую вычислительную машину 7.Устройство 8 предназначено для формирования усредненных значений технологических параметров, которые либо явно искажены при передаче, либо не переданы по причине отказа оборудования, Таким образом, управляющий алгоритм обеспечивает ся полной информацией, необходимой для его функционирования при частичной неисправности элементов системы. без дополнительной загрузки памяти вычислительной машины 7 и без уменьшения быстродействия работы системы при значительных объемах информации.Интересующая диспетчера информация поступает от устройств 6 - 8 и индицируется на устройстве 9. Сформированные алгоритмом управления управляющие команды по цепи устройства 7 - 6 - 5 поступают далее на элементы И 13 и 14.Переключающее устройство 12 предназначено для блокировки управляющих команд от цифровой вычислительной машины 7 в случае неисправности линии связи, либо устройств 5 - 7 или при блокировке вручную. В случае неисправности устройств 5-7 или линии связи на все элементы И посылается сигнал блокировки. При исправной же работе управляющие команды последовательно проходя через элементы И 14 и элементы ИЛИ 15 поступают на исполнительные механизмы 16.рамм и условий, блокировка входа поступления тактовых импульсов из блока 24 наблок 21 и снятие блокировки опроса на блок19. 55 Локальное устройство 34 предназначено для индицирования основных параметров объекта управления, выполнения программ управления, пуска, останова и защиты, обеспечения режима ручного дистанционного управления объектом и режима работы устройства совместно с цифровой вычислительной машиной,Локальное устройство 34, содержащее бло.ки 17-27, работает следующим образом.Информация из блока 3 и блока 2 поступает соответственно на субблоки 17, осуществляющие преобразование аналоговых сигналов в дискретные комбинации, и на элементы 18, осуществляющие электрическую развязку цепей дискретных датчиков, и далее в блок 19, Расположенные в блоке 19 элементы опрашиваются блоком 24, формируя функции включения триггеров соответствующих программ управления и защиты, установленных в блоке 20, Блок 24 предназначен для организации цикла опроса элементов, синтезирующих функции от сигна лов, поступающих с субблоков 17, элементов 18 и прерывания опроса в случае установления на пульте 25 ручного режима управления, или в случае включения триггера какой-либо, программы. С этой целью выход блока 25 соединен со входом блока 24, другой вход которого подключен к выходам блока 20. После окончания работы программы опрос, производимый блоком 24, возобновляется. Кроме того, блок 24 формирует импульсыпоступающие в блок 21, другой зо вход которого соединен с выходом блока 20. Формирование происходит при установлении триггера соответствующей программы, находящегося в блоке 20, в единичное положение функцией включения соответствующей программы, сформированной в блоке 19. В блоке 21 происходит формирование команд соответствующих программ. На блок 22, объединяющий управляющие команды, предназначенные для управления одним исполнительным механизмом, с блока 21 по О ступает очередная команда исполняемой программы,Если алгоритм программы предусматривает проверку какого-либо условия, то в блоке 20 в случае его невыполнения по каналу выход блока 21 - вход блока 20 при 45 появлении соответствующего импульса в блоке 21 от блока 24 происходит включение специального триггера условия данной программы, который определит дальнейшую ветвь программы, Сигналы от датчиков, формирующих эти проверяемые условия, поступают на блок 21 от соответствующих субблоков 17 и элементов 18. При формировании последнего тактового импульса программы происходит обнуление триггеров прогС выхода блока 22 управляющие команды поступают на вход блока 23 выходных усилителей, с выхода которого они поступают на элементы ИЛИ 15.Пульт 25 управления предназначен для установления режима работы устройства, т.е, соответственно запирается или отпираются каналы 31 и 32 блока 24; ручного дистанционного управления, для чего выход пульта 25 соединен со входом блока 22 выходных функций; включения оператором некоторых программ, в этих целях выходы пульта 25 соединены со входом блока 19.Блок 26 предназначен для индикации параметров объекта, названия исполняемой локальным устройством управления программы и сигнализации некоторых команд.Возможен режим работы системы, когда часть функций управления выполняется локальным устройством управления; а часть - цифровой вычислительной машиной. Команда от последней в этом случае поступает на вход элемента 13 И, второй вход которого подключен к выходу устройства 12. При исправности устройств 5 - 7 и линии связи с выхода устройства 12 на вход элемента 13 И выдается сигнал, разрешающий прохождение управляющих импульсов от цифровой вычислительной машины по каналу 30 на блок 27 приема команд, осуществляющий формирование управляющих сигналов на входах соответствующих элементов блоков 20 и 26, в зависимости от кода команды.Локальное устройство управления может работать, кроме этого, в режиме дублирования функций вычислительной машины 7. В этом случае переключающее устройство 12, выход которого соединен с блоком 20, блокирует вместе с обнулением или деблокирует триггеры программ соответственно при исправной и неисправной работе устройств 5 - 7 и линии 29 связи, или при ошибках переданной информации.Простейшие ошибки, обусловленные помехами в линии 29, исправляются самим устройством 12 без деблокирования триггеров программ в локальном устройстве управления.Информация о режиме работы локального устройства управления и о том, какая программа исполняется устройством, выдается с блока 20 по каналу 28 на блок 6.Устройства 10 и 11 диспетчерской связи предназначенны для обеспечения диспетчера информацией в случае выхода из строя блоков 5 и 6 или линии 29.Каждый объект управления (в случае гидрошахты это - эрифтный подъем, углесосные станции, насосная станция) имеет свой контур управления. Некоторые объекты не требуют для своего управления и защиты распределенных во времени команд, т.е. программ. В этом случае в локальномустройстве 34 управления будут отсутствовать блоки 21 и 24.Расширение области применения автоматизированной системы управления технологическим процессом достигается за счет возможности регулирования комбйнаций параметров и программного управления объектом как от цифровой вычислительной машины, так и от локального устройства управления, за счет возможности передачи информации на большие расстояния, за счет возможности режима работы, когда часть функций управления выполняет локальное устройство управления, а часть - цифровая вычислительная машина.Повышение помехоустойчивости системы достигается за счет выполнения переключающим устройством как функции определения неисправности передающих и обрабатывающих информацию устройств, так и ошибок в переданной информации, и за счет включения в структуру устройства формирования значений.Формула изобретенияСистема управления технологическим процессом, содержащая первый блок связи, цифровую вычислительную машину, первый выход которой соединен с первым входом устройства индикации, и в каждом контуре управления второй блок связи, исполнительные механизмы, локальное устройство управления, первые входы которого подключены к первым выходам блока цифровых датчиков, вторые входы - к первым выходам блока аналоговых датчиков, а третий вход - к выходу переключающего устройства, отличаюи 1 аяся тем, что, с целью расширения области применения и повышения надежности системы, в нее введены устройство формирования средних значений параметров и в каждый контур управления - блок анало 8052638го-цифровых преобразователей, первые элементы И, второй элемент И и элементы ИЛИ, выходы которых подключены ко входам исполнительных механизмов, первые входы - к первым выходам локальных устройств управления и первым выходам первых элементов И, а вторые входы - к выходам первых элементов И, первые входы которых соединены с первым входом второго элемента И и выходом переключающего устройства, а вторые входы - с первыми вы- О ходами второго блока связи, подключенноговторым выходом ко входу переключающего устройства, третьим выходом - ко второму входу второго элемента И, четвертым выходом - к первому входу первого блока связи, первыми входами - ко вторым выходам блока цифровых датчиков, вторыми входами через блок аналого-цифровых преобразователей - ко вторым выходам блока аналоговых датчиков, третьим входом - ко второму выходу локального устройства уп О равления, а четвертым входом - к первомувыходу первого блока связи, второй выход которого соединен с первым входом устройства формирования средних значений параметров, подключенного первым выходом ко 25второму входу устройства индикации а вто)рыми выходом и входом - соответственно к первому входу и второму выходу цифровой вычислительной машины, второй вход и третий выход которой соединены соответственно с третьим входом и вторым выходом первого блока связи, выход второго элемента И подключен к четвертому входу локального устройства управления,Источники информации,принятые во внимание при экспертизе351. Авторское свидетельство СССРМ 492852, кл. С 1 05 В 1/58, 25.06.732. Патент Великобритании ЛЪ 1391276,кл. 6 05 В 15/00, опублик. 1976 (прототип),Редактор С. Лыжов Заказ 10683/70 Ти ВНИИПИ Рос по делам 113035, Москва,илиал ППП Патоставитель Е. Ворсобинахред А. Бойкас Корректраж 951 Подписноеударственного комитета СССРизобретений и открытийЖ - 35, Раушская наб д, 4/5ент, г. Ужгород, ул. Проектная, 4 ор В, Бутяга
СмотретьЗаявка
2660980, 22.08.1978
ДОНЕЦКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГОЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ГРУБА ВЛАДИМИР ИВАНОВИЧ, ПАПАЯНИ ФЕДОР АЛЕКСЕЕВИЧ, НИКУЛИН ЭДУАРД КОНСТАНТИНОВИЧ, МОРГУНОВ ВИКТОР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: технологическимпроцессом
Опубликовано: 15.02.1981
Код ссылки
<a href="https://patents.su/5-805263-sistema-upravleniya-tekhnologicheskimprocessom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления технологическимпроцессом</a>
Вычислительный блок к устройствам для измерения геометрических размеров объектов

Номер патента: 765641
Опубликовано: 23.09.1980
Авторы: Костенко, Суздальцев
МПК: G01B 7/02
Метки: блок, вычислительный, геометрических, объектов, размеров, устройствам
...и на его первой выходной шине появляется сигнал, в результате чего происходит опрос первого конъ.онктора блока 5 конъюнкторов.Если фотодатчик ФД 1 ( на чертеже не показан) находится в сработанном состоянии (поверхность измеряемой фигуры не находится в зоне действия этого датчика), то срабатывает первый конъюнктор блока 5 конъюнкторов,и на выходе дизъюнктора появляется сигнал, который через инвертор 9 закрывает конъюнкторО.Второй импульс с распределителя 8 поступает по шине Г 1 на вход конъюнктора 10, но не проходит на вход счетчика 7.Третий импульс с распределителя 8 поступает по шине 1 на вход коммутатора 3, от чего с шины 1 снимается, а по шине 11 появляется сигнал, и все повторяется сначала.Если в зоне действия фотодатчиков (ФД - ФДп)...
Устройство связи

Номер патента: 553609
Опубликовано: 05.04.1977
Авторы: Блинов, Сасковец, Ульянов
МПК: G06F 3/04
Метки: связи
...на вход 13 через элемент И 4,происходит сдвиг 1, записанной в нулевомразряде, в первый разряд регистра, Одновременно регистр сдвига 2 ожидает прихода вызова от первого внешнего устройства с входа16. Если вызов от первого внешнего устройства на входе 16 не был принят в первом такте, то во втором такте происходит сдвиг 1во второй разряд регистра сдвига 2 и ожидание вызова от второго внешнего устройства.Допустим, что вызов от второго внешнегоустройства поступил во втором такте. В этомслучае в нулевой разряд регистра сдвига 2записывается 1, Таким образом, во второмтакте регистр сдвига 2 находится в состоянии,когда к него в нулевом и во втором разрядахзаписана 1, В этом случае 1 с выходавторого разряда регистра сдвига 2...
Устройство для сопряжения электронно-вычислительной машины с каналом связи и периферийным устройством

Номер патента: 1161948
Опубликовано: 15.06.1985
МПК: G06F 13/00
Метки: каналом, периферийным, связи, сопряжения, устройством, электронно-вычислительной
...с информационным входомблока передатчиков, с первым информационным входом коммутатора и.свходом узла свертки, выход которогосоединен с управляющим входом первого селектора признака, выход которого соединен с входом узла формирования сигнала прерывания, с разрешающим входом блока передатчикови с единичным входом первого триггера, выход которого соединен с первым входом первого элемента И, выход которого соединен с входом первого элемента задержки, с единичнымвходом третьего триггера и с первымзапускающим входом генератора одиночных импульсов, выход которогосоединен с синхровходом дешифратора,. с вторым входом первого элемента И и с первым входом второгоэлемента И, выход которого соединенс вторым запускающим входом генератора...
Устройство связи с дельта-модуляцией

Номер патента: 1365364
Опубликовано: 07.01.1988
Авторы: Блат, Ловинский, Усанов
МПК: H03M 3/00, H04J 13/00
Метки: дельта-модуляцией, связи
...у(с) сигнала логического "0" АЛБ 13 уменьшает цифровой код, выставленный на предыдущем такте на величину, задаваемую кодопреобразователем 11, а при наличии в цифровой последовательности у(г.) сигнала логической "1 - увеличивает на ту же величину. Для этого на управляющий вход АЛБ 13 подается цифровая последовательность у(С) с первого выхода регистра 5. На вторые входы АЛБ 13 с выходов буферного регистра 14 подается цифровой код, сосоответствующий величине напряжения аппроксимации на предыдущем такте. Для защиты от ошибок аппроксимации на границах динамического диапазона, возникающих в АЛБ 13, входы ш старших разрядов из общего числа выходов и АЛБ 13 заведены на блок эквивалентности 18, где шс и. Число разрядов п - ш зависит...
Устройство связи эвм

Номер патента: 1399752
Опубликовано: 30.05.1988
Авторы: Знаменский, Чуприк
МПК: G06F 15/16, H04L 12/00
...ИСКЛЮЧАЮЩЕЕ ИЛИ, первый и второй элементы НЕ, причем в блоке кодирования информационный вход блока кодирования подключен к информационному входу первого триггера, выход которого подключен к первым входам первого и второго элементов ИЛИ, выход второго элемента ИЛИ подключен к информационному входу второго триггера и первому входу первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подключен к второму входу первого элемента ИЛИ и информационному входу третьего триггера, выход которого подклю,чен к третьему входу первого элемента ИЛИ, выход четвертого триггера подключен к первому входу третьего элемента ИЛИ и чет" вертому входу первого элемента ИЛИ, выход которого подключен к входу первого элемента НЕ, выход которого подключен к...
Предыдущий патент: Система программного управленияметаллорежущим ctahkom
Следующий патент: Устройство для поиска неисправного логическогомодуля b дискретной системе управления
Случайный патент: Способ обнаружения неплотностей в холодильныхагрегатах