Интегратор азимутных импульсов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
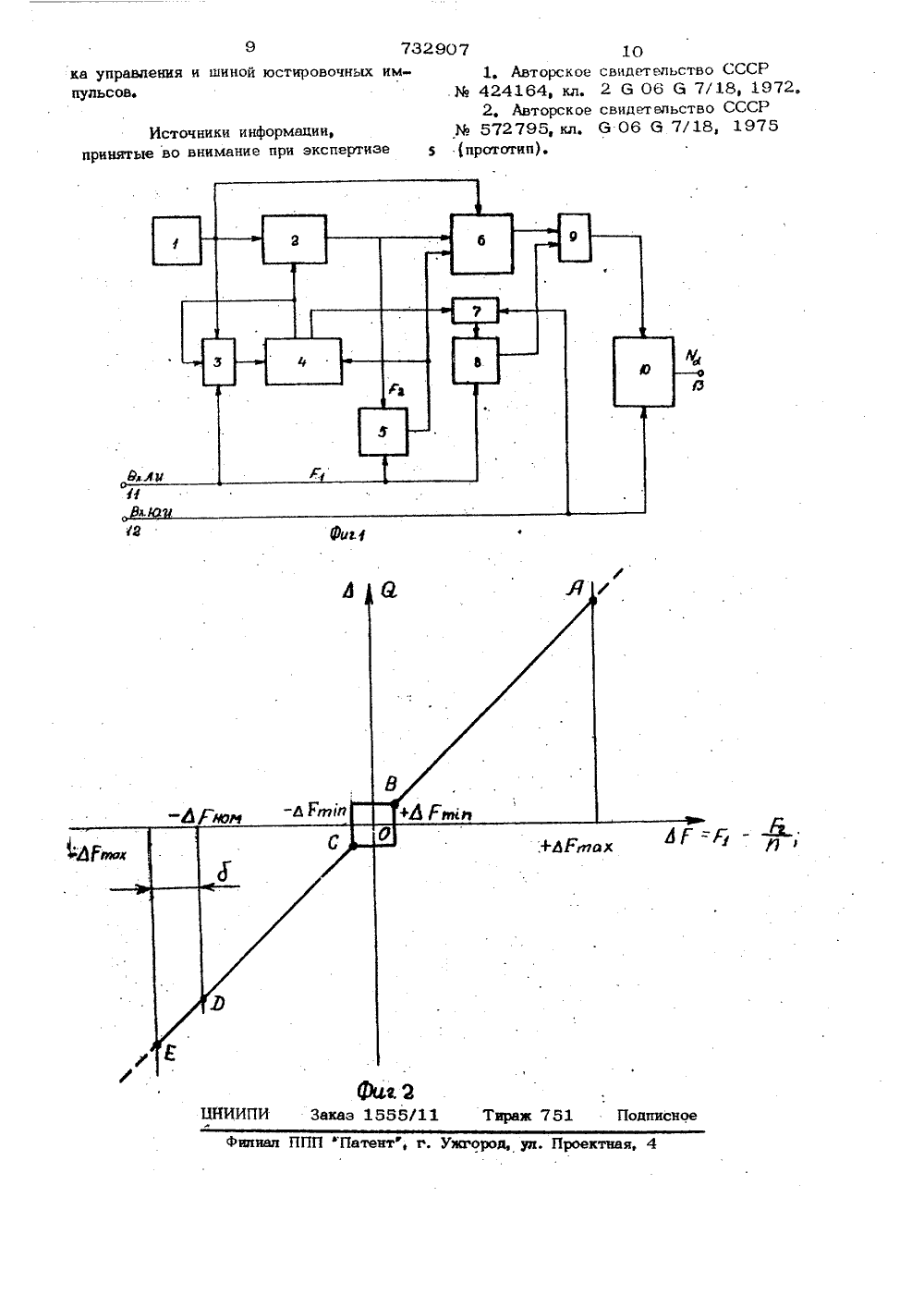
Союз Советск ихСоцналистнческнкРеспублик ОП ИСАИИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 732907(51)Я. Кд. 6 06 6 7/18 с присоединением заявки Ла Гасударственный комитет(088. 8) Опубликовано 05. 05. 80.бюллетень17Дата опубликования описания 10.05,80 ао делам изобретений и етняытий(54) ИНТЕГРАТОР АЗИМУТНЫХ ИМПУЛЬСОВ Изобретение относится к автоматике и вычислительной технике, может быть использовано для воспроизведения значения угла вращения инерционного объекта или для воспроизведения других плавно изме 5 ияюшихся процессов, информация о которых передается методом приращений в системах с цифровой обработкой информации.Известны интеграторы азимутных импульсов, содержащие корректор частоты, корректор фазы и реверсивный счетчик, причем корректор частоты выполняет функции следящего умножителя частотьь Инфо мация в виде приращений (азимутных импульсов) поступает на вход корректора частоты через неравноотстояшие моменты времени. На выходе корректора частоты скорость изменения инерционного процесса восстанавливается в частотной форме им пульсами повышенной частоты. Процесс вжпройзводится интегрирующим звеном реверсивный счетчик), двоичный паралтельный код которого определяет процесс 2во времени. Фазовая коррекция используется для компенсации ошибки, вызванной дискретностью изменения частоты на выходе частотного корректора И .Однако известные интеграторы обладают низкой точностью, узким частотным диапазоном, т.е. не позволяют воспроизводить с достаточной точностью процессы, имеющие широкие диапазоны скоростей изменения.Наиболее бпизким по технической сущности и достигаемому результату к предлагаемому является интегратор аэимутных импульсов, содержащий управляемый делитель частоты, первый вход которого соединен с выходом генератора импульсов, второй вход - с первым выходом блока управления, а выход подключен к первым входам компенсатора фаэовой сшиб ки и измерителя рассогласования соответственно, второй вход компенсатора, фаэовой ошибки соединен с выходом генератора импульсов, второй вход измерителя рассогласования подключен к шине аэимут732907 хгиСледовательно, " - принци 2 -Мпиально не может иметь нулевое значениеИспользование же управляемого делителячастоты с М- сОнецелесообразно с точкизрения аппаратурной реализации интегратора.Цель изобретения - повышение точности интегратора за счет исключения ложных показаний при отсутствии приращений.Иоставленная цель достигается тем,что в интегратор азимутных импульсоввведены триггер, элемент ИЛИ и элементэИ, первый вход которого соединен с:выходом компенсатора фазовой ошибки,второй - с выходом триггера, а выходс вторым входом реверсивного счетчика,первый и второй входы триггера подключены соответственно к шине аэимутныхимпульсов и выходу элемента ИЛИ, первый и второй входы которого соединенысоогветственно со вторым выходом блокауправления и шиной юстировочных импульсов,Ба фиг. 1 представлена структурная,схема интегратора азимутных импульсов,на фиг, 2 - передаточная характеристика,блока управления.Интегратор аэимутных импульсов содержит генератор 1 импульсов управляемый делитель 2 частоты, блок 3 коррекции, блок 4 управления, измеритель 5 рассогласования, компенсатор 6 фвэовойошибки, элемент ИЛИ 7, триггер 8, эле-мент И 9, реверсивный счетчик 10, .шину 11 азимутных импульсов, шину12 юстировочных импульсов, выход 13интегратора.,ЙО - изменение двоичного кода М напервом выходе блока 4 управления в зависимости от ЬР (изменения частотыазимутных импульсоь),+ЙГ х-ЙГ - максимально воэмож 1 ЩУо ФОЪное изменение частоты аэимутных импульсов, на которое реагирует измеритель 5 рассогласования и блок 4управления,ных импульсов а выход измерителя рассогласования соединен с третьим входом компенсатора фаэовой ошибки и первым входом блока управления, второй вход которого соединен с выходом блока коррек 5 Я циивходы которого подключены к выходу генератора импульсов и первому выходу блока управления и шине азимутных импульсов, первый вход реверсивного счетчика соединен с выходом компенсатора фазовой ошибки, а второй вход - с шиной юстировочных импульсов 2В интеграторе осуществляется умножение входных ааимутных импульсов на целое, наперед заданное число таким образом, что на выходе управляемого делите ля частоты, фсрмируются импульсы повышенной частоты равномерно располо женные внутри дискрега входных азимутных импульсов. Импульсы повышенной частогы подсчитыва 1 отся счетчиком, выходные разряды которого образуют параллельный двоичный цифровой код. При изменении периода азимутных импульсов изменение частоты импульсов повышен 25 ной частоты осуществляе 1 ся изменением коэффициекта деления ( Ч ) управляемого делителя частоты через блок управления и блок коррекции по результатам подсчета количества импульсов повышенной часЗО тогы за период между соседними входными аэимутными импульсами в.измерителе рассогласования и с учетом часто- ты азимутных импульсовИнтегратор азимутных импульсов с таким управлениемЭ 5 хорошо отслеживает изменение частоты азимутных импульсов в широком диапазоне частот с сохранением точности воспроизведения угла, Компенсатор фаэовой40 ошибки устраняет ошибку на фазе добавлением или вычитанием из выходной последовательности импульсов повышенной . частоты требуемого .количества импульсов.Недостаток такого устройства - нали 45 чие ложных показаний (двоичный параллельный код угла реверсивного счетчика)при остановке вращения. То есть при остановке вращения антенны (отсутствие аэимутных импульсов в канале связи)0 с выхода управляемого делителя частоты(корректора частоты) поступают импульсы повышенной частоты с частотойгиф 1 и 55где 1 - частота импульсов повышенной частоты нв выходе управляемого делит еля частоты,частота импульсов генератораимпульсов,Ю-. разрядность управляемого делителя частоты,- минимально возможное числона выходе блока управления7329 фддщ- зона нечувствительности (искусственно создаваемая с целью ис. ключения возможностиавтоколебаннй в системе),Г частота входных азимут.ных импульсов,Р частота импульсов новыщенной частоты на выхо де управляемого делителя2 частоты,Й - коэффициент умножения-дГ - номинальное значение отноьклонення частотыпри котором выдается сигнал совторого выхода блока 4 управления (сигнализирующийо прекращении поступленияазимутных импульсов на входизмерителя 5 рассогласования)ширина зоны реагирования25на отклонение частоты больше номинальногоь.Г МдЪодУправляемый делитель 2 частоты пера,вым входом соединен с выходом генератора 1 импульсов, вторым - с первымЗОвыходом блока 4 управления, а выходом.подключен к первым аходам компенсатора6 фазовой ошибки и измерителя 5 рассог 1ласования соответственно, вторые входыкоторых соединены с выходом генератора 1 импульсов, и шиной 11 азимутных;импульсов соответственно, третий входкомпенсатора 6 фаэовой ошибки подключен к выходу измерителя 5 рассогласования и первому входу блока 4 управле,ния, второй вход которого соединен с вы;ходом блока 3 коррекции, первый, второй и третий аходы которого подключенык выходу. генератора 1 импульсов, первому выходу блока 4 управления и шине4511 азимутных импульсов соответственно,первый аход реверсивного счетчика 3.Осоединен с шиной 12 юстировочных импульсов, первый аход элемента И 9 соединен с выходом компенсатора 6 фазовой50ошибки, второй - с выходом триггера 8,а выход - со вторым аходом реверсивного счетчика 10, первый и второй аходытриггера 8 подключены к шине 11 аэимутных импульсов и выходу элемента ИЛИ 7соответственно, первый и второй аходыкоторого соединены со вторым выходомблока 4 управления и шиной 12 юстиро-,вочных импульсов соответственно, выход 07 б13 реверсивного счетчика 10 является выходом устройства,Интегратор азимутных импульсов работает следующим образом. При передаче угла вращения (инерционного процесса) методом приращений, по каналу связи передается последовательность аэимутных импульсов, следующих через равные угловые интервалы, и юстировочный импульс.Интегратор осуществляет экстраполяцию точного углового положения вала на интервале азимутных импульсов, используя инерционные свойства вращающегося объекта. Азимутные импульсы умножаются на целое, наперед заданное число, таким образом, что на выходе управляемого делителя 2 частоты формируются импульсы повышенной частоты, равномернорасположенные внутри дискрета азимутных им,пульсов. Импульсы повышенной частоты через компенсатор 6 фазовой ошибки подсчитываются реверсивным счетчиком 10,выходные разряды которого образуют параллельный двоичный код угла поворотаЬбьекта. При изменении периода азимутМых импульсов изменяется количество импульсов повышенной частоты с выхода управляемого делителя 2 частоты, что приводит к динамической ошибке внутри дискрета входных импульсов. Требуемое вэтом случае изменение частоты импульсовповышенной частоты осущестьняется изменением коэффициента деления управляемого делителя 2 частоты через блок 4управления и блок 3 коррекции по результатам не только подсчета количества импульсов повышенной частоты за период.между соседними входными азимутнымиимпульсами в измерителе 5 рассогласования, но и с учетом частоты аэимутныхимпульсов. За счет такого управления сохраняется точность воспроизведения угла вшироком диапазоне аходных частот азимутных импульсов, Импульсы повышенной частоты интегрируются реверсивнымсчетчиком 10, запускающим каждым юстировочным импульсом. Инерционные свойкаства вращающегося обьекта (изменяющегося процесса) позволяют повысить разрешающую способность интегратора путемумножения частоты аэимутныхимпульсов.Замкнутый; контур, состояШий из генератора 1 импульсов, управляемого делителя 2 частоты, измерителя 5 рассогласования, блока 4 управления и блока 3 коррекции осуществляет слежение за частотой аэимутных импульсов и ее кратное умФормул а изобретения 7 73290ножение. Изменение частоты импульсовповышенной частоты достигается изменением коэффициента деления ( сф ) управляемого делителя 2 частоты таким образом,Мчто - =ССОФ. Для достижения данной 59пропорции блок 4 управления и блок 3коррекции изменяют ач пропорциснально( (где Я " ) поэтому данный эамкрнутый контур хорошо отслеживает измене 10ние частоты азимутных импульсов в широком диапазоне частот с сохранением точности воспроизведения угла. При сравнительно низкой частоте азимутных импуль 15сов управляющее воздействие изменяетсяна бсаьшую величину, позволяющую болееэффективно компенсировать ошибку по частоте. При высокой частоте азимутныхимпульсов управляющее воздействие изме 20няется на меньшую. величину, чем достигается меньшаея динамическая ошибка.Для устранения ошибки по фазе обусловленной дискретностью изменения коэффициента деления ( 0 ), управляемого делителя2 частоты, в интеграторе применен компен:сатор 6 фазовой ошибки, осуществляющийсброс ошибки добавлением или вычитанием из выходной последовательности импульсов повышенной частоты (Е ) требуеОмого количества импульсовПри остановке вращения (отсутствииприращений) ЬГ приобретает отрицательный знак; так как,1 и достигаетРЬЦ-чьР при котором вырабатьь-вается со второго выхода блока 4 управления сигнал через элемент ИЛИ 7на сброс триггера 8, запрещающего через элемент И 9 прохождение импульсов.40повышенной частоть 1 на счетный в.ход реверсивного счетчика 10, При этом двоич-ный параллельный код Кугла поворотаравен Идействит.1 сдействитФЧ за счет инерционности са-,мого интегратора, причемй, - =1 +8 Мф 5В принципе возможно учесть +8 й прй считывании действительных показаний реверсивного счетчика 10. Триггер 8 сбрасывается также через элемент ИЛИ 7 каж 50дым юстировочным импульсом. Триггер8 в исходное состояние устанавливаетсякаждым азимутным импульсом по входу1,"., При установке триггера В.в единичное состояние на элемент И, 9 поступает55разрешающий йотенциал и импульсы повышенной частоты беспрепятственно прохо дят на счетный вход реверсивного счетчика 10,7 8Предложенный интегратор азимутных импульсов выгодно отличается благодаря повышенным качеством воспроизведения углового положения (инерционного процесса) вследствие исключения ложньм показаний при остановке вращения (отсутст г вии приращений), Искажение же действи,тельных показаний по отношению к инерционному процессу может быть учтено (ФИ ), так как практически имеетоднои, то же значение. То есть при торможении вращения и остановке вращающегося обьекта представляется возможным вычислить его действительное положение (например антенны).В результате наличия указанных достоинств предлагаемого интегратора рас-, ширяются сфера его использования и функциональные возможности. Интегратор азимутных импульсов, содержащий управляемый далитель частоты, первый вход которого соединен с выходом генератора импульсов, второй входс первым выходом блока управления, а выход подключен к первым входам компенсатора фазовой ошибки и измерителя рас- согласования соответственно, второй вход . компенсатора фазовой ошибки соединен: с выходом генератора импульсов, второй аход измерителя рассогласования подключен к шине азимутных импульсов, а выход измерителя рассогласования соединен с третьим входом компенсатора фа зовой ошибки и первым аходом блока уп- равления, второй аход которого соединен с выходом блока коррекции, входы которого. подключены соответственно к выхсм ду генератора импульсов, первому выходу блока управления и шиве азимутных импульсов, первый аход реверсивногосчетчика соединен с шиной юстировочныхимпульсов, отли чающи йс я тем,что, с целью повышения точности интетратора эа счет исключения ложных показаний при отсутствии приращений, интегратор содержит триггер, элемент ИЛИ иэлемент И, первый вход которого соединен с выходом компенсатора фазовой ошибкивторой - с выходом триггера, а выходс вторым входом реверсивного счетчика,первый и второй входы триггера подключены соответственно к шине аэимутньм импульсов и выходу элемента ИЛИ, первый и второй аходы которого соединены соответственно со вторым выходом бло9 732907 ка управления и шиной юстировочньи импульсов. 6 - -л ИИПИ Заказ 1555/11 1 Подписное иал ППП фПатент, г. Ужгоро ктная,Источники информации,принятые во внимание при экспертизе10 1, Авторское свидетельство СССР Хо 424164, кл. 2 б 06 б 7/18, 1972. 2, Авторское свидетельство СССР Мо 572795, кл. Я 06 б 7/18, 1975 5 ( прототип)
СмотретьЗаявка
2550321, 01.12.1977
ПРЕДПРИЯТИЕ ПЯ А-3327
ЧЕБОТАЕВ ОЛЕГ ЕГОРОВИЧ, МОТИН ВАЛЕНТИН ФЕДОРОВИЧ
МПК / Метки
МПК: G06G 7/18
Метки: азимутных, импульсов, интегратор
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/5-732907-integrator-azimutnykh-impulsov.html" target="_blank" rel="follow" title="База патентов СССР">Интегратор азимутных импульсов</a>
Устройство для отображения информации на матричном экране

Номер патента: 1005176
Опубликовано: 15.03.1983
Автор: Шабурова
МПК: G09G 3/20
Метки: информации, матричном, отображения, экране
...- .-7" И, единичный выход каждого 1-го разряда регистра 8 столбца соединен со вторым входом соответствуюцего ему эл мента 7 И, выход которого связан с соответствукнццм столбцовым входом матричноГо экрана 1 и через элемент 10 задержки со входом сброса 1-го разряда регистра 8 столбца ц одним из входов элемента ИЛИ 9.Элемент 7И предназначен для формирования сигнала окончания обновления 35 информации в выбранной строке табло.Элс мент 9 ИЛИ и элементы 10 - 10" задержки предназначены для формирования сигналов окончания записи знака в очередцук) ячейку индикации. Выход элемента 9 40ИЛИ соединен с третьим вхо;10 М блока 1 управления.Матричный экран 11 предназначен длясцображения записываемой в его ячейки индикации информации. 45 Ус гройство...
Устройство для преобразования частоты следования импульсов в код

Номер патента: 1182676
Опубликовано: 30.09.1985
Авторы: Добрынин, Скворцова, Соловьев
МПК: H03M 1/50
Метки: импульсов, код, преобразования, следования, частоты
...импульсов.Устройство работает следующим образом.При подаче сигнала на шине 11 0 "Пуск" (фиг. 2 Б ) происходит установка в исходное (нулевое) состояние блока 1 Формирования временного интервала, счетчика 4, КБ-триггера 10. По переднему Фронту сигнала преобра- у зуемой частоты К, поступающему по шине 13 после подачи сигнала "Пуск", блок 1 вырабатывает временной интер 2676 гвал (фиг. 2 1 ), рави. п и периодам преобразуемой частоты 1(Фиг,2 д) .Передним фронтом сигнала Соткрываются элемент 2 и элемент 9, и на управляющие 8 и К входы триггера 10 начинают поступать импульсы эталон" ной частоты Е(Фиг, 2 е ), причем на 8-входы импульсы поступают через элемент, 2, а на К-вход - через инвертор 8 и элемент 9, в результате чего при скважности...
Генератор импульсов с изменяющейся частотой

Номер патента: 1503060
Опубликовано: 23.08.1989
Автор: Медников
МПК: H03K 3/64
Метки: генератор, изменяющейся, импульсов, частотой
...частота вновь плавно увеличивается по закону геометрической прогрессии до максимальной, установленной задатчиком 11 максимальной частоты, затем цикл изменения повторяется (фиг.3 б).Если на втором выходе задатчика 14 режима установлен логический 0", а на его первом выходе - уровень лг 1 гической "1", то на выходной шине 10 генерируются импульсы, частота которых изменяется от наибольшей Р к наименьшей Рмц по закону геометрической прогрессии, после чего частота скачком изменяется до максимальных значений Р, затем цикл повторяется (фиг.За).В том случае, когда на выходах задатчика 14 режима установлены нулевые уровни напряжений, выходная частота плавно изменяется по закону геометрической прогрессии как в сто 03060 0 5 1 О рону...
Устройство для измерения частоты сигналов

Номер патента: 991324
Опубликовано: 23.01.1983
Автор: Большаков
МПК: G01R 23/02
...наформирователь 9. По фронтам мерногоинтервала Т 1 УЛЗ 8 производит задержку входного сигнала на один периодГ, Формирователь 9 формирует импульсы, начинающиеся по фронтам мерного интервала Т 1 и заканчивающиесяпо приходу второго импульса Г(фиг.2 е), Длительность каждого изэтих двух импульсов с 1 и с зависитот фазовых соотношений спорной и измеряемой частоты, но их разностьоТ=с-с зависит только от измеряемой частоты (с точностью до Т=1/),УЛЗ 8 можно выполнить в виде двухсоединенных последовательно Р-триггеров, .срабатывающих по фронту, причемвход Р первого из них соединен с первым выходом блока 2 управления, обасинхровхода подключены к входу устройства, а выход второго триггера - квходу формирователя 9, роль которогов этом случае...
Устройство для контроля и диагностики цифровых блоков

Номер патента: 1167610
Опубликовано: 15.07.1985
Авторы: Руденко, Шилинговский
МПК: G06F 11/00
Метки: блоков, диагностики, цифровых
...в положении "Останов по ошиб ке" поступает уровень логической "1", вход 58 сигнала "Счет" с выхода тумблера Г "Счет-ввод задержки", с которого в положении "Счет" поступает уровень логической " 1", выход 59 сигнала установки и сброса, выход 60 сигнала сброса, выход 6 1 сигнала сброса, выход 62 сигнала установки, выход 63 сигнала записи кода, выход 64 сигнала записи кода. Коммутатор 6 (фиг. 4) содержит триггер 65, элементы 2 ИИЛИ 66, элементы 2 ИИЛИ 67, входы 68 кода задержки, вход 69 сигнала разрешения отображения первого знака, вход 70 сигнала разрешения отображения второго знака, вход 71 сигнала разрешения отображения третьего знака, вход 72 сигнала разрешения35 Генератор 11 тактовых импульсов (Фиг. 9) содержит элемент 2 И-НЕ...
Предыдущий патент: Электронный интегратор
Следующий патент: Устройство для определения параметров аппроксимирующей экспоненциально-косинусной корреляционной функции
Случайный патент: Вибрационная мельница