Контурная система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 568938
Автор: Лихачев
Текст
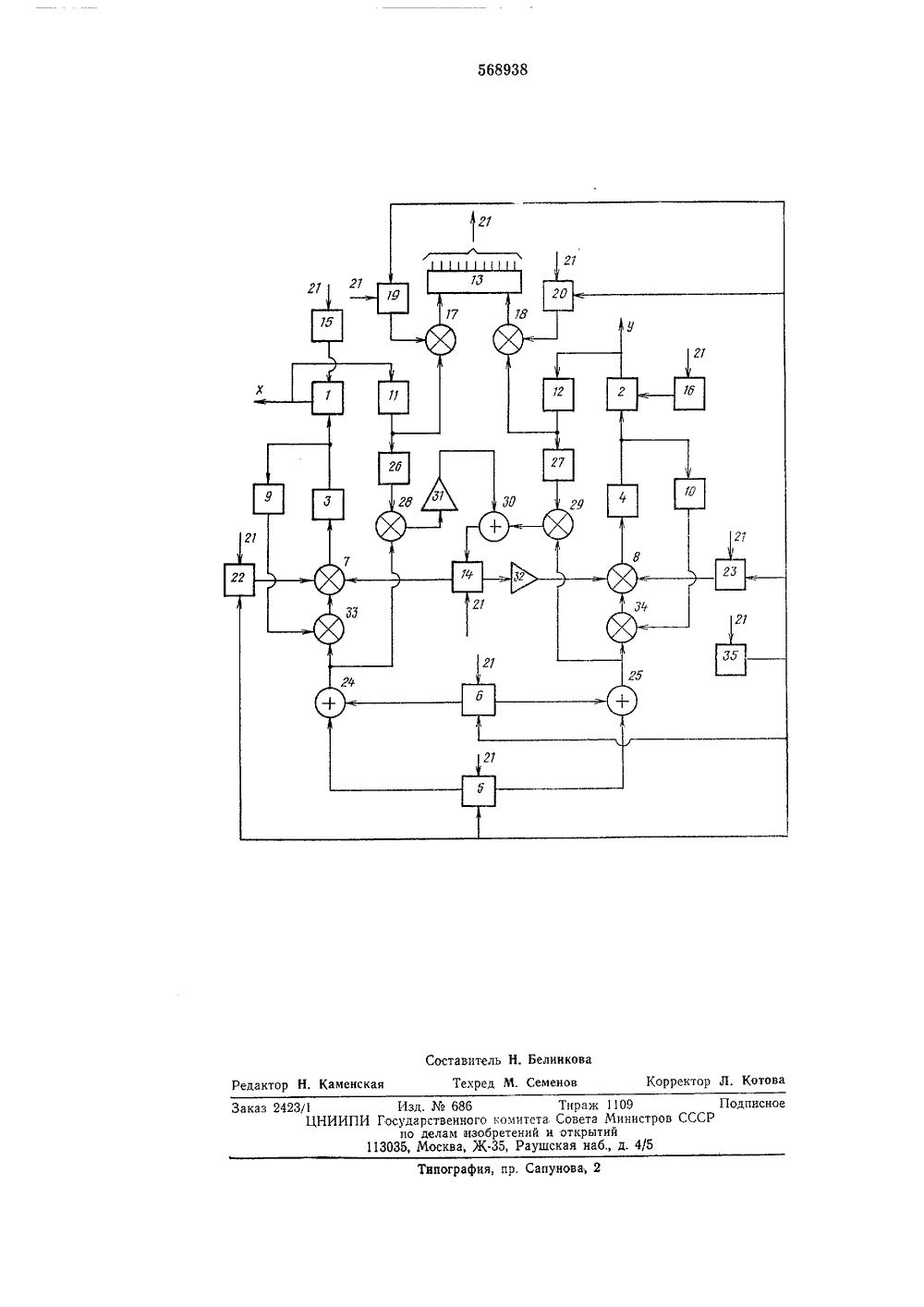
1ОП ИСАНИ ЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ пщ 68938 Союз Советских Сомиалистических Республик(51) М. Кл.з б 05 В 1938 Государственный комитетСовета Министров СССРпо делам изобретений(088.8) юллетень3 ткрыти 9.77 та опубликования описани 72) Автор изобретени А. А. Лихачевордена Ленина авиационный институтим,. Серго Орджоникидзе Московск 1) Заявитель(54) КОНТУРНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИ Изобретение относится к области автоматики и вычислительной техники и может быть использовано на станках с программным управлением,Известна система цифрового управления, которая может обеспечивать работу станка в контурном и позиционном режимах, состоящая из цифровой вычислительной машины, приводов и датчиков положения. Цифровая вычислительная машина производит вычисления траектории и положения инструмента, преобразования и коррекцию входной информации. Вычисление траектории и положения инструмента производится путем интерполяции, вычисления текущих координат для индикации и определения позиции, сравнения участков позиционирования по координатам для определения закона изменения скорости движения и выделения участков торможения ЯНедостатками такой системы программного управления являются необходимость в сложной аппаратуре подготовки информации для ввода ее в систему управления, сложность самой системы управления и, как следствие, большая вероятность отказов,Известно устройство распределения импульсов цифрового управления в одном из Х и У направлений, согласно которому несколько различных точек сравниваются устройствами вычитания и сравнения импульсов относительно эталонных (опорных) точек, задаваемых функциональными генераторами с целью распознавания среди них точек наибольшего при ближения к эталонным и распределения последующих импульсов на основе результатов сравнения 2.Недостатками такого устройства являютсянеобходимость применения дополнительных 10 устройств, выдающих эталонные импульсы,предназначающиеся только для распознавания величины и знака последующих командных импульсов и не используемых непосредственно в процессе цифрового управления, что 15 снижает надежность системы, отсутствие устройств, компенсирующих ошибки перемещений, необходимость в интерполяторе контурной системы управления.Наиболее близким техническим решением к 20 данному изобретению является контурная система программного управления, содержащая устройство ввода программы, подключенное к задатчику скорости, устройство управления и по каждой координате устройство регулирования скорости, подключенное к устройству ввода программы, и последовательно соединенные блок управления исполнительным органом, подключенный через датчик скорости к первому блоку сравнения, исполнительный орган, соединенный с устройством фиксации, датчикперемещения, подключенный к преобразователю перемещение - напряжение, и второй блок сравнения, один из входов которого через блок памяти соединен с устройством ввода программы, а выход второго блока сравне ния подключен ко входу устройства управления 13.Недостатками такой системы являются ограничение точности отслеживания перемещений в результате того, что определение 10 ошибок подачи производится по отклонениям скорости, определяемой цифровым тахометром, без учета ошибок перемещений, система регулирования скорости подачи не выдает импульсов, компенсирующих ошибки переме щения, а только разрешает формирование импульсов команд при отрицательном содержании блока ошибки, регулирование скорости подачи по каждой оси координат производится путем ускорения или замедления скорости 20 подач по всем осям координат одновременно. Система нуждается в интерполяторе, что усложняет систему и снижает ее надежность.Целью изобретения является повышение точности и надежности контурной системы 25 программного управления.Поставленная цель достигается тем, что в систему введены функциональный преобразователь, вход которого подключен к устройству ввода программы, последовательно соединен- З 0 ные первый инвертор и первый сумматор, коммутатор и второй инвертор и по каждой координате третий и четвертый блоки сравнения и второй сумматор, подключенный к функциональному преобразователю и задатчику ско- З 5 рости, выход второго сумматора по каждой координате через, последовательно соединенные первый блок сравнения и третий блок сравнения, подключенный к устройству регулирования скорости данной координаты, подсоединен к блоку управления исполнительным органом, причем выход второго сумматора соединен со входом четвертого блока сравнения, подключенного к преобразователю перемещение в напряжен данной координаты, 45 вход первого сумматора и выход второго инвертора соединены соответственно с выходом четвертого и входом третьего блоков сравнения одной координаты, а выход коммутатора и вход первого инвертора подключены соот ветственно к выходу четвертого и входу третьего блоков сравнения другой координаты, причем выход устройства управления соединен со входами функционального преобразователя, задатчика скорости и по каждой координате в со входами блока памяти, устройства регулирования скорости и устройства фиксации.На чертеже представлена блок-схема двух- координатной контурной системы программно го управления, которая содержит исполнительные органы 1 и 2, блоки 3 и 4 управления исполнительным органом, задатчик скорости 5, функциональный преобразователь 6, третьи блоки сравнения 7 и 8, датчики скоро- б 5 сти 9 и 10, датчики перемещения 11 и 12, устройство управления 13, коммутатор 14, устройства фиксации 15 и 16, вторые блоки сравнения 17 и 18, блоки памяти 19 и 20, соединения 21 устройства управления с блоками системы, устройства регулирования скорости 22 и 23, вторые сумматоры 24 и 25, преобразователи перемещение - напряжение 26 и ,27, четвертые блоки сравнения 28 и 29, первый сумматор 30, первый инвертор 31, второй инвертор 32, первые блоки сравнения 33 и 34, устройство ввода программы 35,Система работает следующим образом.При прямолинейных траекторных перемещениях исполнительного органа станка по осям координат управляющий ток может подаваться в каналы регулирования как одновременно, так и раздельно. Скорость перемещения исполнительных органов 1 и 2, например двух гидродвигателей, в ортогональных координатных направлениях регулируется блоками 3, 4 управления исполнительными органами, например управляемыми дросселями гидросистем, приводимыми в действие электроприводами постоянного тока, параметры которого регулируются задатчиком скорости 5, получающим команды от устройства управления 13 на соответствующее изменение напряжения управляющего тока. При прямолинейных траекторных перемещениях цепи обратной связи от датчиков 11 и 12 разобщены коммутатором 14 и параметры управляющего тока, подаваемого задатчиком скорости 5 на блоки управления 3 и 4, корректируются только датчиками скорости 9 и 10, например датчиками давления жидкости в гидросистемах гидроприводов. В этом случае блоки 3, 4 питаются током, параметры которого пропорциональны производной от ошибки перемещения, то есть пропорциональны изменению скорости перемещения, и стабилизируют таким образом скорость движения исполнительного органа в каждом координатном направлении.При раздельном поочередном функционировании каналов регулирования в процессе лозиционирования органов станка смещение не- функционирующего исполнительного органа 1 или 2 предотвращается его закреплением устройством фиксации 15 или 16 по команде устройства управления 13.В процессе перемещений датчики перемещения 11 и 12 выдают ток на вторые блоки сравнения 17, 18, функционально связанные с блоками памяти 19, 20.При программировании требуемых перемещений в каждом переходе технологической операции ячейки блока памяти настраиваются на соответствующее количество импульсов, которые в процессе функционирования системы через преобразователи, содержащиеся в блоках 19, 20, сравниваются с поступающими от датчика 11 или 12. При переходе в сбалансированное состояние блоки сравнения 17 и 18 выдают управляющие команды устройству управления 13, которое, в свою очередь, вы568938 даст команды: задатчику 5 - обесточить каналы регулирования; устройствам фиксации 15, 16 - закрепить исполнительные органы 1 и 2; олокам памяти 19, 20 - подключить к блокам сравнения 17, 18 ячейки памяти перемещений в последующем переходе технологической опепации; коммутатору 14 - разобщить или соединить сумматоп 30 с блоками сравнения 7, 8; устройству 35 - подать очере тнгто программу работы блот(ов системы.Стабильные. но различные тпропорциональные) скопости двтттт(ентля исполнительных органов при воспроизведетцли прямолинейных траекторных перемецтений огганов станка, нат(лонны.с относительно коопдинатных осей Х, ,У. обеспечиваются включением устройством 13 в пдечо блока сравнения 7 или 8 соответ- СтВУтОтттЕГО ПЕзИСтОРаСтРОйСтВа РЕГУЛИРОВания скорости 22 или 23,Ппи тппавлетлии контлттымтл перемещениями по тсомячдям устройства тппавления 13 залатчик 5 и ф 1 нкциональный ппеобпазователь 6 подтслточаются в цепь питания, я коммутатор 14 подключает цепи обратной связи от датчиков 11, 12 к третьим блокам сравнения 7 и 8.По команде устройства 13 стройства регулипования скопости 22 и 23 автоматически ппиводят в Павттовесное состояние тбалансил тот) мостовые схемы блоков спавнения 7 и 8, ф 1 нкциональньтй ппеобпазовятель 6 подключается к смматопам 24, 25 и обеспечивает изменение ппавлятошего тока по требуемой математической фнкции. Блоки 7 и 8 начинают выдавать токи питания блокам управления 3, 4 переменного наппяжения по тем фх нкциям, тсотогые восппоизводит преобразователь 6. Наппимеп, если преобразователь воспроизводит изменение параметров тока в КП 1;ГОВЬ 1 Х ФУНКЦИЯХ СИН 1 С - КОСИНУС ТО СКО- рость пепемещения исполнительного органа по ОРИ Х будет:У= Ут. з 1 п(о,5 0 15 20 25 Зо 35 40.движения опгана 2 и исполнительный орган 45 5055 60 05 а скорость по оси У:У,=УтсозИ,В пез.льтяте елокения этих скоростей исполнительный орган станка будет иметь траектопней движения окру жпость.Эллиптические кпивые исполнтлтельный орган станка б дет описывать, если ппи воспроизведении этой же Функтттлтл 1 круговой) в плечи мостовы схем блоков сравнения 7 и 8 буд т введены дополнительные резисторы устройств 22 или 23, станавливатоших в данном случае величины большой или малой полуОсРЙ эллипса.Радиусы кпивизны полученных траекторий перемешеттия определяются скоростью изменения напряжения упрявляютцего тока, выдаваемого в каналы регулирования функциональным преобразователем 6, величина вектора скорости (скорость подачи исполнительного органа по этой траектории движения) 6устанавливается задатчиком скорости 5. Длина траекторных перемещений по каждой координате ограничивается системами отсчета перемещений, описанными выше.Для исключения рассогласования скоростей координатных перемещений исполнительных органов 1 и 2, которые могут возникнуть в результате колебаний внешних нагрузок на приводы, система снабжена цепью обратной связи датчиков перемещения 11 и 12 с блоками сравнения 7 и 8 через преобразователи 26, 27 параметров тока до уповня уппавляюшего тока, блоки сравнения 28, 29, сумматор 30, инвепторы 31, 32 и через коммутатор 14,Ввиду того, что параметры тока управления в ка кдом тсанале реги липования корректируются датчиками 9 и 10 по скопости слежения через первые блоки спявнения ЗЗ и 34, датчики перемещения 11 и 12 выдают на блоки сравнения 28, 29 ток, папаметпьт которого ппопорциональны ошибке пепемешения каждого исполнительного оргячя 1 тл 2 и производной от этой ошибки, т. е, ппопопциональны изменениям скорости пепемещения. Блоки 28, 29 сравнивают эти параметры с папаметрами тока питания контуров пегулипования и выдают на стмматор 30 сигналы, ппопорциональные ошибкам слежения по каждому контпч Пегтлипования. В пезультате наличия в пепи датчика 1 инвептопа 3 Ст мматоп 30 ппоизводит алгебпаическое действтле сглмипоганпя и выдает через т(оммутатоп 14 копректипчоший импульс. Лспользовантле инвертопа 32 обеспечивает подачу на блоки сравнения 7 и 8 импульса противоположного знака, что повышяРт бьтстподейтствие системы регулипования, Если в результате внешнтлх воздействий скопость двтлжения опгана 1 снижается. соответственно снижается и скорость станка продолжает движение по заданной тпаектории. Таким образом, предлагаемая система, в отличие от известных, является замки той по каналам пег липования.Все параметры ф 1 нкционтлроватлия системы в каждом переходе технологической опепацитл устяттявтиваются устройствохл ввода программы 35, наппимеп электпонной вычтлслительной матттиной, которое ПазПабатьтвает техчологический ппоцесс выполнения операции на станке и засылает в запоминаютцие устпойства: из б чокя3 - ппогп амму последовательности лействття всех элементов системы; блоков 19, 20 - ппогпямму величин перемещений: блоков 5. 6, 22, 23 - ттрограмм режимов обработки.Ппименение данной системы ппотпаммното т правления позволяет повысить точность и рясшипить функптлональные возможности систем мппавления, автоматически ппогпаммировать ппоцессы обпяботки поверхностей криволинейной фопмы без применения дорогостоятпего обоПтдоватлия тинтеПполяторов и др.), цифровых и копировальных систем ппавления и значительно сокращает количество электрической и электронной аппаратурыв системе, повышает надежность, сокращаетстоимость и габаритные размеры.Формула изобретенияКонтурная система программного управления, содержащая устройство ввода программы, подключенное к задатчику скорости, устройство управления и по каждой координате устройство регулирования скоростиподключенное к устройству ввода ппограммы, и последовательно соединенные блок управления исполнительным органом, подключенный через датчик скорости к первому блоку сравнения, исполнительный орган, соединенный с устройством фиксации, датчик перемещения, подключенный к преобразователю перемещение в напряжен, и второй блок соавнения, один из входов которого через блок памяти соединен с устпойством ввода программы, а выход второго блока сравнения подключен ко входу устройства управления, о т л и ч а ющ а я ся тем, что, с целью повышения точности и надежности системы, в нее введены функциональный преобразователь, вход которого подключен к устройству ввода прогпаммы, последовательно соединенные первый инвеотор и первый сумматор, коммутатор и второй инвертор и по каждой координате третий и четвертый блоки сравнения и второй сумматор, подключенный к функциональному преобразователю и задатчику скорости, выход второго сумматора по каждой координате через последовательно соединенные первый блок сравнения и третий блок сравнения, подключенный к устройству регулирования скорости данной координаты, подсоединен к блоку управления исполнительным органом, причем выход второго сумматора соединен со входом четвертого блока сравнения, подключенного к преобразователю перемещение - напряже ние данной координаты, вход первого сумматора и выход второго инвертора соединены соответственно с выходом четвертого и входом третьего блоков сравнения одной координаты, а выход коммутатора и вход первого 15 инвертора подключены соответственно к выходу четвертого и входу третьего блоков сравнения другой координаты, причем выход устройства управления соединен со входами функционального преобразователя, задатчика 20 скорости и по каждой координате - со входами блока памяти, устройства регулирования скорости и устройства фиксации.Источники информации, принятые во внимание при экспертизе25 1, Сборник Контурные системы числовогоуправления и их элементы, М Машиностроение, 1972 г., с. 25 - 29.2. Патент США ЛЪ 3619582, кл. 235-152,1971 г.з 0 3. Патент США3792333, кл, 318-571,1974 г.568938 Составитель Н. Белинкова Техред М. Семенов Корректор Л, Котова Редактор Н, Каменская Типография, пр, Сапунова, 2 Заказ 2423/1 Изд. Мо 686 Тираж 1109 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам язобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5
СмотретьЗаявка
2344865, 05.04.1976
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА АВИАЦИОННЫЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ
ЛИХАЧЕВ АНДРЕЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/39, G05B 19/41
Метки: контурная, программного
Опубликовано: 15.08.1977
Код ссылки
<a href="https://patents.su/5-568938-konturnaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система программного управления</a>
Устройство для переключения резервируемых блоков системы телеуправления

Номер патента: 1032601
Опубликовано: 30.07.1983
Авторы: Галантерник, Калинин, Корольков, Литвинов
МПК: H05K 10/00
Метки: блоков, переключения, резервируемых, системы, телеуправления
...блока 2, вход опроса которого соединен с выходом счетчика, 7 пери- . ода контроля и первым входом элемента И 3, второй вход которого соединен с выходом запоминающего блока 2, выход элемента И 3 соединен с открывающими входами первого и второго управляемых вентилей 11 и. 12 и с уп" равляющим входом счетчика 1.3 импугьсов, закрывающий вход второго управляемого;вентиля 12 соединен с выходом первого генератора 4 тактовых импульсов,и тактовым входом первого генератора 5 И-последовательности,ин;.зУформационный вход, второго- управляемого вентиля 12 соединен с выходом счетчика 13 импульсов и закрывающим входом первого управляемого вентиля 11, выхор втооого управляемого венВтиля 12 соединен с. запускающим вхо дом первого генератора, 4 тактовых...
Устройство опознавания цвета декодирующего блока цветной телевизионной системы пал

Номер патента: 291375
Опубликовано: 01.01.1971
Авторы: Сорока, Хлебородов
МПК: H04N 9/69
Метки: блока, декодирующего, опознавания, пал, системы, телевизионной, цвета, цветной
...цветовой поднесущей, необходимой для контрольных декодирующих и транскодирующих устройств. Требуемую фазовую стабильность поднесущей можег обеспечить только система автоматической подстройки фазы. Однако такая система не может быть применена в описанном известном устройстве, поскольку амплитуда цветовой поднесущей на ее выходе никак не связана с фазой коммутации сигнала цветности и процессами автоподстройки.Цель изобретения - повышение надежности опознавания цвета и уменьшение времени опознавания,В предлагаемом устройстве это достигается тем, что в блоке установки фазы генератора импульсов пол устрочной частоты включены квадратурный и синфазный фазовые детекторына один вход,каждого подан сигнал со входа блока восстановления...
Устройство для синхронизации блоков вычислительной системы

Номер патента: 1467551
Опубликовано: 23.03.1989
МПК: G06F 1/04
Метки: блоков, вычислительной, синхронизации, системы
...с тактового генератора 9 (фиг.2),Последовательности импульсов с выходов делителя 5 частоты и триггеров 6-8 представляют собой последовательности прямоугольных импульсов с частотой в четыре раза меньше частоты тактового генератора 9, причем каждая последовательность сдвинута по фазе относительно предыдущей на одну восьмую периода, эти последовательности поступают на выходы блока 1, с которых по линиям связи поступают на входы блоков 2,В блоках 2 эти последовательности поступают на входы элементов 10 и 11 сложения.по модулю два, с выходов которых они поступают на входы элемента ИЛИ 12, на выходе которого образуется последовательность, частота которой в четыре раза древьппает частоту, передаваемую по линиям связи,Фформула изобретения...
Приемное устройство системы телемеханики

Номер патента: 596996
Опубликовано: 05.03.1978
МПК: G08C 15/06
Метки: приемное, системы, телемеханики
...кода, описываюшего состояние входов 37 атого периферийного устройства 1. Прием этого сообщения блоком первичной обработки вызывает появление соответствующего сигнала на его выходе 26, пере вод вединичное состояние соответствуюшего индикатора в регистре 8 и запуск блока 7 управления, после чего блоком перви щой обработки через блок 6 сопряжения в линию 3 связи генерируется "единяпый "коц, вызывающий повторную передачу сообщения от того же периферийного устройства 1. При совпадении первого и второго сообщения блоком первичной обработки на выходе 26формируется повторный сигнал, вызываюшийиндикацию возникшей ситуации блоком 9оконечного преобразования уже описаннымвыше образом,Если в тот момент, когда оперяторомосушествляется прием...
Передающее устройство системы телеизмерения

Номер патента: 387414
Опубликовано: 01.01.1973
Автор: Авторы
МПК: G08C 19/16
Метки: передающее, системы, телеизмерения
...20 опрашивает блок сравнения б. В случае равнозначности кодовых комбинаций текущего и предыдущего отсчетов на выходе блока сравнения б появляется сигнал равенства, который поступает на один из входов логического элемента ИЛИ 22 и далее на регистр сдвига 28, подключенный через открытый дискретный ключ 11 к блоку питания 13. Происходит сдвиг числа в регистре сдвига 28 ь Если же кодовые комбинации неравнозначны, то появляется сигнал на втором выходе блока сравнения б, который через логический элемент ИЛИ 22 также осуществляет сдвиг числа в регистре сдвига 28; и, кроме того, запускает формирователь сигнала записи 1. Производится запись 1 в последнюю ячейку регистра сдвига 28, а импульсом с выхода формирователя сигнала перезаписи...
Предыдущий патент: Система автоматического управления
Следующий патент: Устройство для контроля технологических параметров
Случайный патент: Способ определения гемолитического действия лекарственных средств окислителей