Способ управления измельчительным агрегатом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(51) 5 4 Ра0 ВАМП;81 ЧО-фКЯс.СЕАЯмота,ТЕНИ Е Б оЧИО ом с цикой и ости тСУДЛРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ И ГКНТ СССР К АВТОРСКОМУ СВИДЕТЕЛЬСТВ(56) Авторское свидетельство СССРМ 1036375, кл. В 02 С 25/00, 1982Авторское свидетельство СССРМ 1222312, кл. В 02 С 25/00, 1984.(54) СПОСОБ УПРАВЛЕНИЯ ИЗМЕЛЬ ТЕЛЬНЫМ АГРЕГАТОМ(57) Изобретение относится к области равления измельчительным агрегат мельницей сливного типа в замкнутом ле. Может быть использовано в цветн черной металлургии, промышленн Изобретение отно измельчительным агр сливного типа, в замк быть использовано в таллургии, промышле материалов, химиче удобрений и других от ются шаровые бараба сится к управлению егатом с мельницей нутом цикле, и может цветной и черной менности строительных ской. минеральных раслях. где применянные мельницы.я является повышеия.авлена система. реасоб управления, датчик 1 производиьного агрегата. регу- производительности Целью изобретени ние качества управленНа чертеже предст лизующая данный споСистема содержит тельности измельчител лятор 2 стабилизации строительных материалов, химической и других отраслях. Позволяет повысить качество управления. Для достижения этой цели измеряют и стабилизируют на заданных значениях производительность агрегата и плотность готового продукта и пошаговый поиск оптимальных заданий этим системам стабилизации, причем поиск оптимальных заданий системам стабилизации осуществляют пошаговым изменением мощности привода насоса гидроциклона до достижения оптимума циркулирующей нагрузки или предельного значения уровня пульпы в зумпфе насоса, или предельной величины сигнала акустического параметра разгрузки мельницы, или предельного значения параметра ограничения процесса флотации, или предельной величины времени переходного процесса, при этом задания системам стабилизации устанавливают таким, чтобы снять соответствующее ограничение, 1 ил,иэмельчительного агрегата, регулирующии орган 3 системы стабилизации производительности, датчик 4 плотности готового продукта, регулятор 5 стабилизации плотности готового продукта, регулирующий орган 6 системы стабилизации пло ности готового продукта, датчик 7 мощности двигателя насоса гидроциклона, регулятор 8 стабилизации циркулирующей нагрузки, вычислительное устройство 9 микроЭВМ, датчик 10 уровня пульпы в зумпфе, датчик 11 акустического параметра разгрузки мельницы, датчик 12 параметра ограничения процесса флотации, датчик 13 расхода воды в зумпф, регулятор 14 стабилизации подачи воды в зумпф.10 Выделим три основных режима функционирования системы управления по данному способу.Режим поиска оптимальных установок системам стабилизации и роизводител ьности измельчительного агрегата и плотности пульпы готового продукта, Поиск ведется пошаговым изменением мощности двигателя насоса гидроциклона до момента достижения оптимальной циркулирующей нагрузки или до выхода на одно из укаэанных выше ограничений. Включение режима поиска может осуществляться по инициативе оператора или поступать как команда с верхнего уровня управления,Режим стабилизации найденных оптимальных заданий системам управления производительностью измельчительного агрегата плотностью готового продукта. Функционирование систем стабилизации продолжается до момента включения режима поиска либо выхода на одно из упомянутых ограничений. Режим корректировки заданий системам стабилизации при выходе на одно иэ упомянутых ограничений. В случае наступления такого ограничения в режиме поиска или стабилизации осуществляется пошаговое снижение заданий до тех пор, пока система не сойдет с ограничения.Система имеет контуры стабилизации и роиэводительности измел ьчительного агрегата 1 - 2 - 3, расхода воды в зумпф 13-14 - б, циркулирующей нагрузки агрегата (по косвенному параметру мощности электро- привода насоса гидроциклона) 7-8-2, плотности готового продукта 4-5-14, которые поддерживают заданные оптимальные значения параметров, При этом контуры стабилизации расходов руды в мельницу и воды в зумпф предназначены для повышения качества управления, поскольку они компенсируют высокочастотные возмущения, Заданные оптимальные значения определяются вычислительным устройством 9 на основании алгоритма, Для выработки оптимальных заданий используется информация датчика 1 расхода руды (обратная связь через объект), датчика 10 контроля предельных значений уровня пульпы в зумпфе, датчика 11 акустического параметра шума разгрузки мельницы и датчика 12 параметра ограничения процесса флотации.Оптимальные значения уставок выбираются в результате поиска на уровне, соответствующем оптимуму циркулирующей нагрузки, при этом производительность агрегата по готовому продукту заданного ка 15 20 25 30 35 40 45 50 чества максимальна. Оптимальны уставки также (для данных условий работы иэмельчительного агрегата) при выходе на одно из упомянутых ограничений, поскольку дальнейшее увеличение заданий системам стабилизации не только не приводит к увеличению производительности по готовому продукту, а ухудшает показатели качества измельчения и даже может привести каварии. П р и м е р 1, Допустим, возникла необходимость в поиске новых оптимальных уставок системам стабилизации (это может быть следствием изменения типа руды по иэмельчаемости), В этом случае включается поисковая часть алгоритма управления и вычислительное устройство 9 в пошаговом режиме начинает увеличивать (на заданную величину Л С накаждом шаге) задание контуру стабилизации циркулирующей нагрузки в агрегате (по косвенному параметру мощности электродвигателя насоса гидро- циклона). На каждом шагу происходит (по завершении переходного процесса) оценка приращения производительности Ь 0 за текущий шаг. Если это приращение ЬО положительно, то на следующем шаге вновь увеличивается на заданную величину ЬС задание контуру стабилизации циркулирующей нагрузки и т,д. Таким образом, последовательными шагами идет движение к оптимуму циркулирующей нагрузки. Когда оптимум по циркулирующей нагрузке достигнут, то следующее положительное приращение /Л С/ даст отрицательное значение - ИО/. В этом случае поиск считается законченным. Задание контуру стабилизации циркулирующей нагрузки Сзад=Стек-Л С, т.е, соответствующим заданию на последнем шаге режима поиска, Соответствующая корректировка (в сторону уменьшения задания по плотности) делается также в контуре стабилизации плотности готового продукта.При оптимуме циркулирующей нагрузки измельченный агрегат обеспечивает глобальный (наивысший из всех возможных при данных условиях) максимум по производству готового продукта заданного качества.Этот пример рассматривает ситуацию, когда измельчительный агрегат не выходит ни на одно из ограничений,П р и м е р 4. В поисковом режиме на одном из шагов система вывела агрегат на ограничение по уровню пульпы в зумпф. Переполнение зумпфа (датчик 10 уровня) мо- жет быть следствием того, что не1727910справляется насос, перекачивающий воз- контурах науровне шага поиска. предшестросший объем пульпы на гидроциклон, В вующим появлению этого ограничения. этом случае система должна автоматически П р и м е 5. Всякийи м е р . сякий раз, после очеред- прервать дальнейший поиск (отключается ного поискового шага, осуществляется конпоисковая часть алгоритма) и задания в 5 троль времени переходного процесса и контурах стабилизации циркулирующей на- следующий шаг приращения задания контугруэки (а следовательно, и производитель- рам стабилизации осуществляется не раности агрегата), плотности готсти готового нее, чем закончится переходной процесс,м на предыдущем продукта (а следовательно, и расхода воды вызванный приращением на ив зумпф) устанавливаются на уровнях. соот шаге, В памяти микроЭВМ 9 заложены две ветствующим тем, которые были на пред- константы ТБ и Тм. Это соответственно врепоследнем шаге режима поиска мя наиболее быстрого ТБ и наиболее медр и м е р 3, В поисковом режиме на ленного Тм переходных процессов. Удобно одном из шагов наблюдается интенсивный знать Тм=1 ТБ, где-м= ь. где - целое число. Оценка выход из разгрузки мельницы металличе продолжительности времени переходного ского(обломки шаров и т.п.) и рудного(круп- процесса может вестись по одному или сраные куски руды) скрапа. Это явление эу несколькими параметрами.В момент изменения задания (очеред- мельницу начнут уже покидать шары, и яв- ной шаг поисковой системы и начало пере- ляется аварийным. Помимо предвестия о 20 ходного процесса) запоминается значение начале перегрузки выходящий скрап заби- одного (основного и определяющего) или вает трубы, попадает в насос и может при- нескольких параметров. По истечении вревести к поломке рабочего колеса насоса, В мени ТБ сравниваются значения этого пакачестве индикатора, фиксирующего мо- раметра (параметров) в текущий момент и мент начала интенсивного выхода скрапа из 25 момент начала переходного процесса, Если мельницы, в системе используется акусти- разница между значениями параметров в ческий датчик, установленный на разгрузоч- моменты времемени начала и конца периода ной горловине мельницы (датчик 11). ТБ превышает заданную величину Ьзл, то Амплитуда выходного сигнала такого датчи- это значит, что переходный ит, что переходный процесс еще неледующее сравнение происходитущ возрастает при интенсив окончен, Следующее сра.ном выходе скрапа за счет ударов через промежуток времени 2 ТБ от начала металлических обломков и кр"пных к сковр, ус ов переходного процесса, при этом параметры руды о разгрузочную бутару, При выходе на сравниваются за начальный и конечный моограничение по заданному предельному менты те Т, . Ементы текущего Б и т,д. Если по истечении значению акустического параметра раз времени Т =Тни м= Б переходный процесс так и грузки мельницы система автоматически от- не уста оне становился, т,е. последний принял заключает поиск и устанавливает задания . тяжной харж ой характер. то это свидетельствует контурам стабилизации на уровнях, соот- о перехо ео переходе агрегата в неустановившийся ветствующим тем, которые были на пред- режим с последующим переполнением изпоследнем шаге режима поиска.ности измельчать и аварией. В таком случаеП р и м е р 4. В поисковом режиме, на режим поиска также прерывается (по огра- одном из шагов возникает ограничение по ничению предельного времени переходного процессу флотации. Такое может случиться, процесса) и снижение знижение задания системам если резко повысился уровень пульпы в ка стабилизаста илизации должна быть на один шаг намерах флотомашин основной и контрольной зад и сущесад и существенно выше (возможно три и флотации, ухудшились показатели качества более).(содержание ценного компонента, крупно- Конкретные значения ТБ, Тм и Дззд. сть и т.п.) концентрата, увеличились потери зависят от типоразмера измельчительного с хвостами, не справляются последующие 50 агрега аагрегата, его состояния (до и после капиза фабрикой переделы, Все эти факторы мо- тальнотального ремонта), схемы измельчения и гут быть следствием возросшего обьема т,п., и подбирпульпы питания флотации либо другой при- цес ет,п., и под ираются индивидуально в прочины.цессе наладки системы.При появлении такого ограничения си Рассмотри эассмотрим этот же пример, задавшись стема 12 по сигналу датчика (или датчика конкретными числовыми значениями вели- ручного ввода с пульта оператора) должна чин. Допустим ТБ=10 мин, Тм=100 мин, автоматически прервать поиск и застаби--4 ,ПАзад.". редположим также, что в качестлизировать задания в соответствующих ве основного определяющего режим перегрузки выбран параметр мощностидвигателя насоса гидроциклона йн.Допустим, что в момент первого поискового шага мощность равнялась 50%, а через Ть=10 мин - 56%. Поскольку разница сигналов Лаан=6% больше заданной величины Лэад,=4, то переходный процесс считается незаконченным и спустя 20 мин снова замеряется текущее значение параметра Мн (допустим оно составило 62 о ). Разница Лен=62 - 56=6 обольше Азад., поэтому спустя 30 мин снова сравнивают текущее и начальное значения ЙН для новой пятиминутки. Предположим, Ин в конце ЗТБ составило 65 о ,тогда Лаан=65 - 62=3%Ьэд. В этом случае переходный процесс можно считать законченным и новый поисковый шаг допустим. Если же спустя 10 ТБ так и не Выполнилось условие Ь Кнтказад то считается, что система вышла на ограничение по продолжительности переходного процесса и реакцией должно быть значительное снижение производительности, что и предусмотрено алгоритмом.П р и м е р 6, Допустим, при работе системы управления в режиме стабилизации измельчительный агрегат выходит на одно из перечисленных в примерах 2 - 5 ограничений. Реакция системы должна быть таковой, чтобы последовательйыми шагами в сторону снижения задания снять зто ограничение (ограничения), В большинстве случаев достаточно одного шага назад, но если этого окажется мало, то процедура может быть повторена. Аналогичное правило предусматривается, если агрегат вышел сразу нэ два и более ограничений, Величина одного шага назад во всех ограничениях (кроме описанного в примере 5) должна быть одинаковой. При наступлении ограничения по продолжительности переходного периода шаг назад должен быть больше,При нахождении уставок системы стабилизации, соответствующих оптимальной циркулирующей нагрузке (пример 1) обеспечивается глобальный максимум производительности измельчительного агрегата по готовому продукту требуемой крупности. В случае выхода на одно из ограничений обеспечивается также оптимум (для данных условий), но локальный из-за действия соответствующего ограничения, Вместе с 5 тем, учет в системе управления этих ограничений делает работу системы безаварийной.Данный способ позволяет улучшить качество управления и повысить производи тельность измельчительного агрегата.Формула изобретения Способ управления измельчительнымагрегатом с мельницей сливного типа в замкнутом цикле, включающий измерение и 15 стабилизацию на заданных значениях производительности агрегата и плотности готового продукта и пошаговый поиск оптимальных заданий системам стабилизации производительности агрегата и плот ности готового. продукта, о т л и ч а ю щ ий с я тем, что, с целью повышения качества управления, измеряют мощность привода насоса гидроциклона, уровень пульпы в зумпфе насоса, акустический параметр разгруз ки мельницы, параметр ограниченияфлотации и время переходного процесса в агрегате, поиск оптимальных заданий системам стабилизации осуществляют пошаговым изменением мощности привода насоса 30 гидроциклона до достижения оптимумациркулирующей нагрузки, или предельного значения уровня пульпы в зумпфе насоса, или предельной величины сигнала акустиче- ского параметра разгрузки мельницы, или 35 предельного значения параметра ограничения флотации, или предельной величины времени переходного процесса, причем изменение заданных значений производительности агрегата и плотности готово го продукта осуществляют до достиженияоптимума циркулирующей нагрузки, до снятия предельного значения уровня пульпы в зумпфе насоса, предельной величины сигнала акустического параметра разгрузки 45 мельницы, предельного значения параметра ограничения процесса флотации и предельной величины времени переходногопроцесса.1727910 Составитель Л.ШароваРедактор Н.Лазаренко Техред М.Моргентал Корректор Н.Ревска Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина,аказ 1362 Тираж ВНИИПИ Государственного комитета по из 113035, Москва, Ж, РПодписноеетениям и открытиям при ГКНТ СССРшская наб., 4/5
СмотретьЗаявка
4835723, 07.06.1990
ЛЕНИНГРАДСКИЙ ГОРНЫЙ ИНСТИТУТ ИМ. Г. В. ПЛЕХАНОВА
АНДРЕЕВ ЕВГЕНИЙ ЕВГЕНЬЕВИЧ, ЕГОРОВ ВАЛЕНТИН ФЕДОРОВИЧ, ЗЛАТОРУНСКАЯ ГАЛИНА ЕВГЕНЬЕВНА, КОСТРОВА МАРИНА АНАТОЛЬЕВНА, КУЗНЕЦОВ ПЕТР ВЛАДИМИРОВИЧ, ЛЕУС ВАЛЕРИЙ ВИКТОРОВИЧ, СЕРОВ ГЕННАДИЙ ВАСИЛЬЕВИЧ, ТИХОНОВ ОЛЕГ НИКОЛАЕВИЧ
МПК / Метки
МПК: B02C 25/00
Метки: агрегатом, измельчительным
Опубликовано: 23.04.1992
Код ссылки
<a href="https://patents.su/5-1727910-sposob-upravleniya-izmelchitelnym-agregatom.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления измельчительным агрегатом</a>
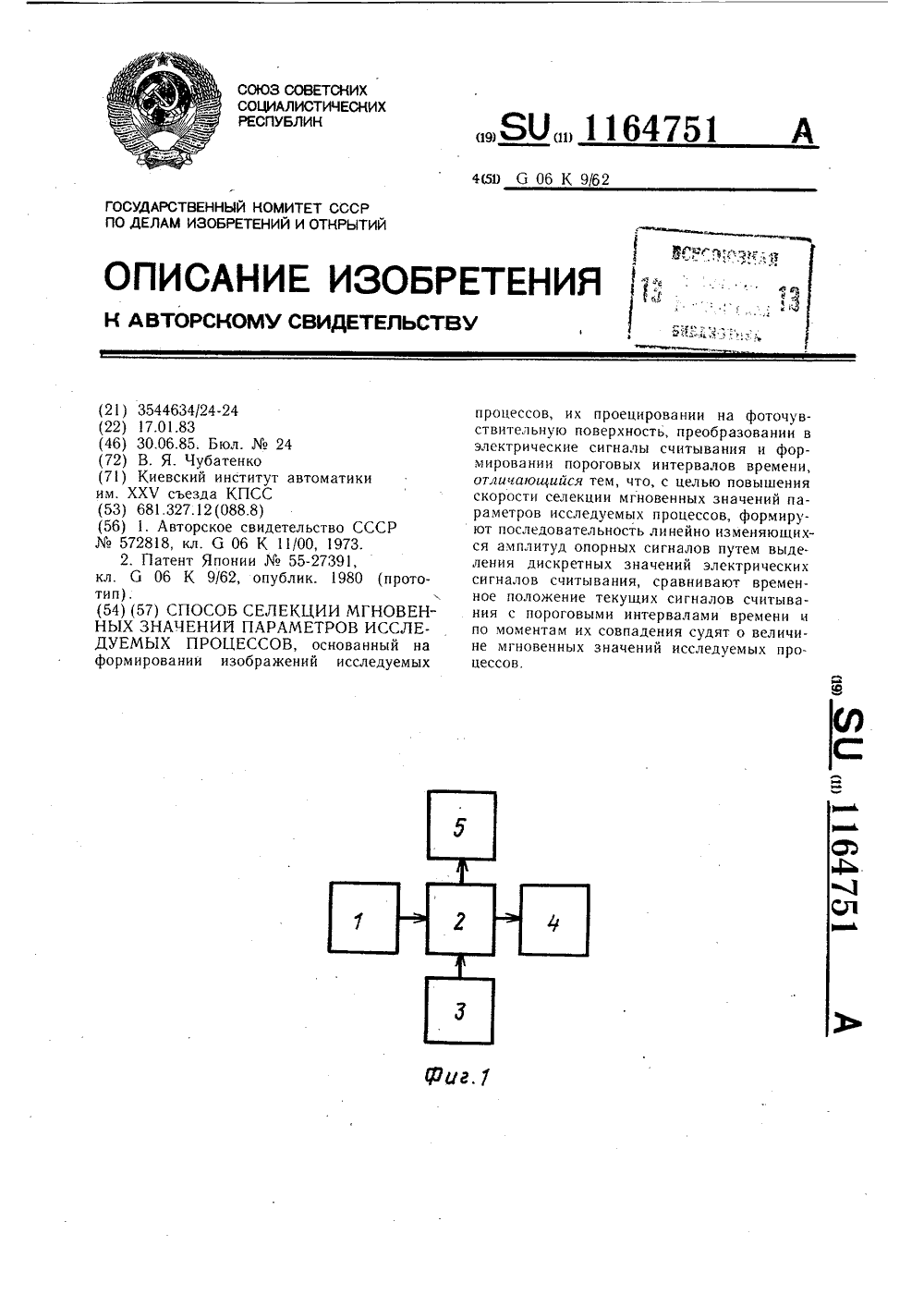
Способ селекции мгновенных значений параметров исследуемых процессов
Номер патента: 1164751
Опубликовано: 30.06.1985
Автор: Чубатенко
МПК: G06K 9/62
Метки: значений, исследуемых, мгновенных, параметров, процессов, селекции
...кабель 4 и индикаторное устройство 5.Тест-маска 6 состоит из точечных фотоприемников (круглые волоконные свето- воды) 7 - 12 и др., расположенных на оди- наковом расстоянии друг от друга, равном ступени 13 квантования.Приемно-передающий модуль содержит клеммы 14 электрического входа, входной световод 15, выходной световод 16, фото- резистор 17 и светодиод 18, входящие в состав длинных оптронов 19 и 20 соответственно, резистор 21 и клемму 22 электрического выхода.Индикаторное устройство состоит из схемы 23 управления, включающей входную клемму 24 преобразователь 25 единичного позиционного кода в параллельный двоичный код, преобразователь 26 параллельного двоичного кода в двоично-десятичный код и преобразователь 27...
Устройство для определения максимального значения параметра
Номер патента: 277907
Опубликовано: 01.01.1970
Авторы: Богущевский, Воронин, Куц, Соболев, Сорокин, Талалаевский
МПК: G01D 1/12
Метки: значения, максимального, параметра
...указания текущего значения пар аметра. Зубчатый сектор 1 служит для передачи движения от механизма указания текущего значения параметра к зубчатому колесу 2, которое соединено с поводком 3 с помощью пальцев 4. Поводок 3 связан через коническую передачу 5 и 6 с выходной осью ферродинамического датчика 10, на которой закреплен сектор 7, соединенный с колесом 8 и возвратной пружиной 11. Зубчатое колесо 8 связано с помощью фрикционной передачи с якорем 9 электромагнитной муфты 12.Электромагнитная муфта электрически соединена с контактом реле 1 Р 1. Реле 14, зашунтированпое конденсатором С, расположено в анодной цепи фазового детектора 13, собранного на лампе, представляющей собой триод,277907 Предмет изобретения фи Составитель 3....
Устройство для определения текущего и накопленного значений параметра
Номер патента: 571816
Опубликовано: 05.09.1977
Автор: Першин
МПК: G06G 7/18
Метки: значений, накопленного, параметра, текущего
...подклюЧенык соответствующим выходам фазового селейатора, вход которого. подсоединен.к Выходуусилителя. 3 то повышает точность рабаътустройства.571816 3редуктора 10 и указателя текущего значении параметра 11.При сигнале датчика параметра 1, равном нулю, на входе усилителя 4 сигнал также равен нулю. Двигатели 8 и 9 не включены. При измененчи сигнала датчика параметра появляется сигнал разбаланса на входе уси лителя 4. Усиленный сигнал подается на вход фазового селектора, котооый в зависв мости от фазы сигнала управляет работой 1 р одного иэ двигателей. Двигатель с помощью дифференциального редуктора изменяет уотввку компенсатора до тех пор, пока с входа усилителя не будет снят сигнал разбаланса. Так как основной двигатель кинема)Ь...
Устройство для упорядоченной выборки значений параметра

Номер патента: 739527
Опубликовано: 05.06.1980
Авторы: Самойленко, Скубилин, Шаглий
МПК: G06F 7/02
Метки: выборки, значений, параметра, упорядоченной
...выход второго триггера подключенко вторым входам элементов И второйи третьей групп и к третьему входуэлементов И четвертой группы, выходвторого алемента ИЛИ соединен с выходной шиной управления узла анализа.На чертеже приведена блоксхема устройства,Устройство содержит узлы анализа1 1 11, каждый из которых сос:тоит из алементов 2, 2 2 И,групйы элементов 3, 3,31 п . И,группы элементов 4, 4 4 цИЛИ,7 739 20 ИЛИ третьего разряда сигналами сохраняются неизменными.При вйбранной степенй упорядоченияравйой 1, переключателем 27 соеднняется единичный выход 2-го разряда регистра 26, приэтом первым импульсом с генератора 20 тактовых сигналов единицас первого разряда регнстра 26"йереводится во второй, с выхода переключателя27 импульс...
Устройство для регистрации суммарного значения параметра

Номер патента: 938289
Опубликовано: 23.06.1982
МПК: G06G 7/18
Метки: значения, параметра, регистрации, суммарного
...поступает с диодногомостика 19, а сеточное с трансформатора 20 через резисторы 21 и тиристор 22, управляемый через диод 23сигналом с выхода усилителея 3. ТрансФорматор 20 входит в состав блока 5установки нуля, содержащего такжереле 24 установки нуля, включаемоекнопкой 25, и концевой выключатель 26"Нуль , кинематически связанный с валом суммирующего двигателя 6.Через собственный контакт 27 реле 24 встает на самоблокировку, аконтактныю 28 и 29 коммутирует входыфазового селектора 4 с входами блокаустановки нуля.Устройство работает следующим образом.При увеличении сигнала датчика 1параметра с выхода усилителя 3 на фазовый селектор 4 поступает сигнал, фаза которого совпадает с фазой сеточного напряжения на правой половине двойного триода...
Предыдущий патент: Система управления процессом дробления в конусной дробилке
Следующий патент: Устройство для измерения загрузки мельниц
Случайный патент: Фотоприемное устройство