Система управления рабочим процессом асфальтоукладчика
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
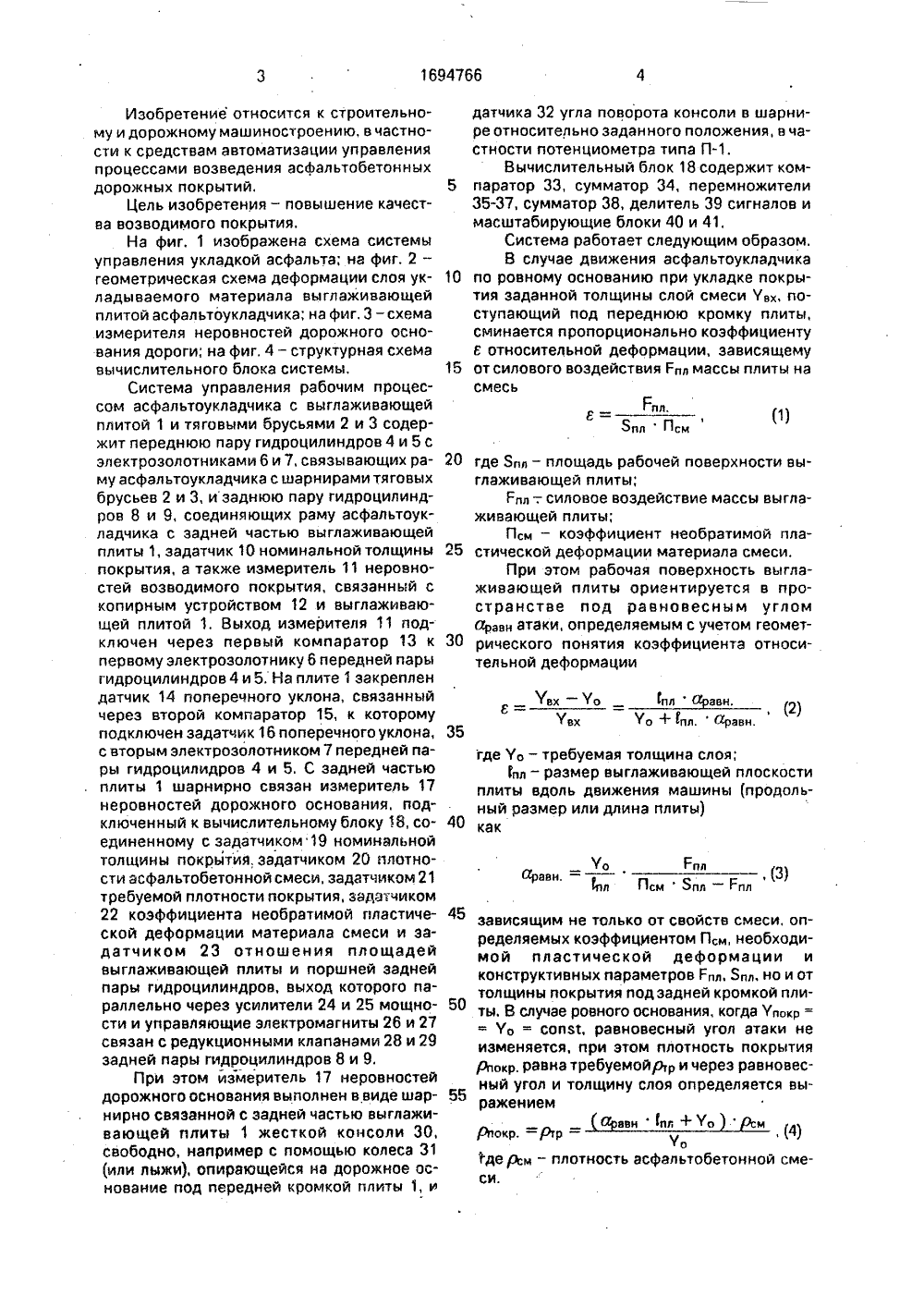
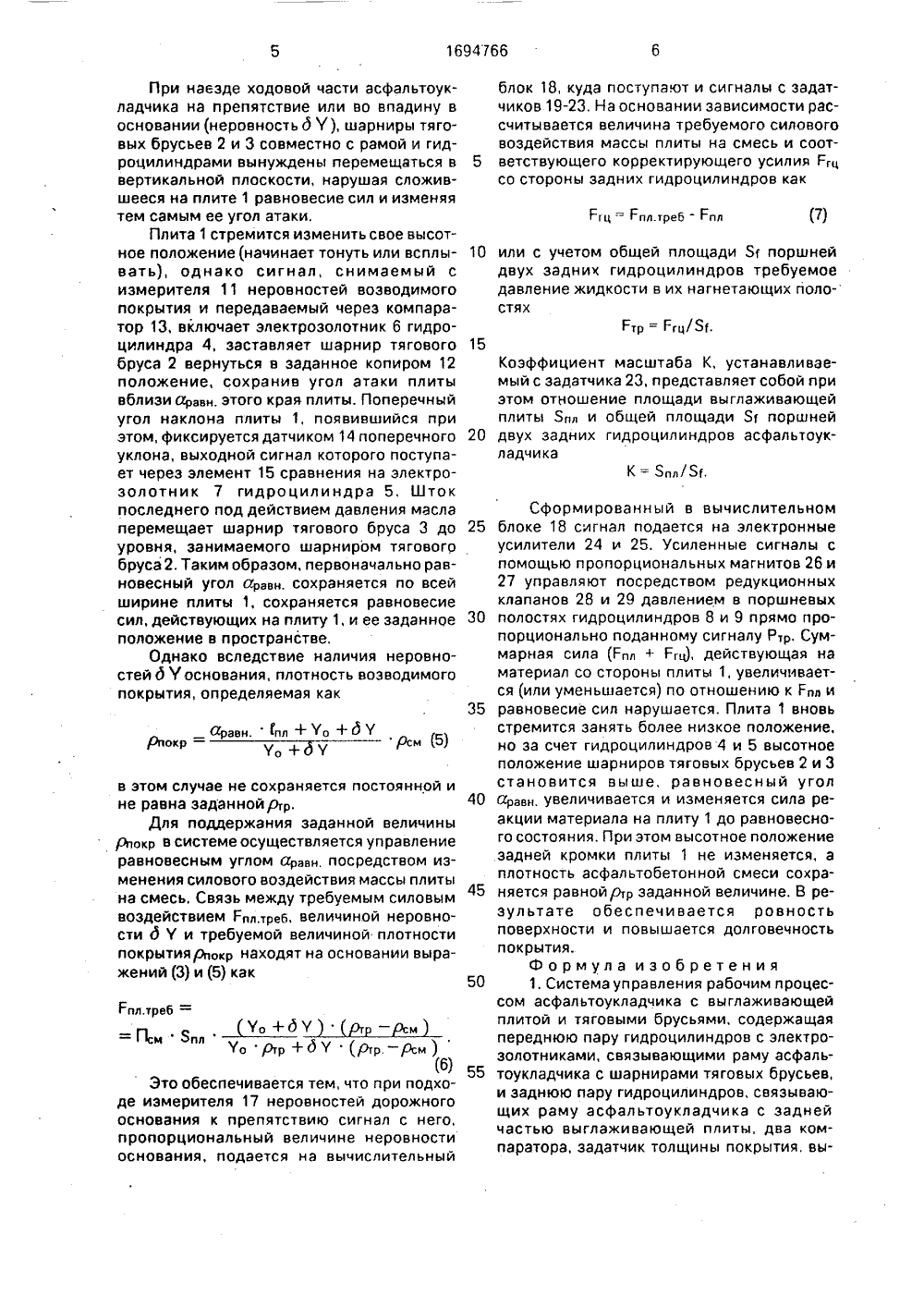
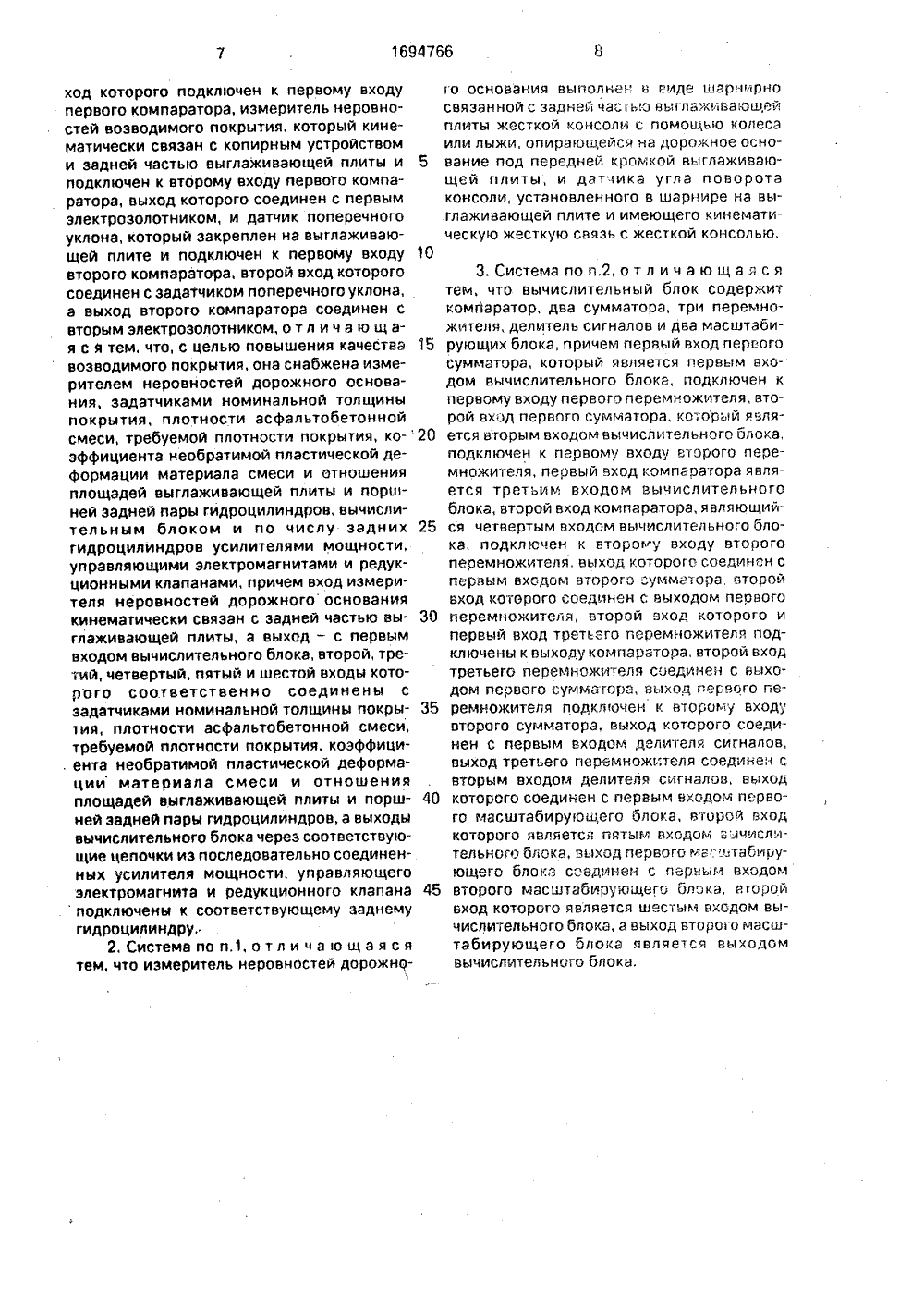
)9) 5 Е 01 С 19/34 ГОСУДЛРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТПРИ ГКНТ СССР ЦЯ ИИИ 0 ПИСАНИЕ ИЗОБРЕТЕНИ СКОМУ СВИДЕТЕЛЬСТ(21) 4709777/33 (22) 26,06.89 (46) 30,11.91. Бюл, И. 44 (71) Московское научно-производственное объединение по строительному и дорожному машиностроению "ВНИИстройдормаш" (72) Н. И, Афа н ас ьев, М. Н, Гороховский, М,А.Батуев, В.В,Кабанов, В,А.Романцов, В.Е.Руфов и В.А.Самарин (53) 625,085 (088.8) (56) Авторское свидетельство СССР В 1143790, кл, Е 01 С 19/48, 1983,Авторское свидетельство СССР М 1491930, кл. Е 01 С 19/34, 1987, (54) СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ПРОЦЕССОМ АСФАЛЬТОУКЛАДЧИКА (57) Изобретение относится к строительству и дорожному машиностроению, в частности к средствам автоматизации управления процессами возведения асфальтобетонных дорожных покрытий, позволяет повысить качество возводимого покрытия, Система содержит выглаживающую плиту 1, тяговые брусья 2 и 3, переднюю пару гидроцилиндров 4 и 5 с электрозолотниками 6 и 7, заднюю пару гидроцилиндров 8 и 9, задатчик 10 номинальной толщины покрытия, измеритель 11 неровностей возводимого покрытия, копирное устройство 12, компаратор 13, датчик 14 поперечного уклона, компаратор 15, задатчик 16 поперечного уклона, измеритель 17 неровностей дорожного основания, вычислительный блок 18, задатчик 19 номинальной толщины покрытия, задатчик 20 плотности асфальтобетонной смеси, задатчик 21 требуемой плотности покрытия, эадатчик 22 коэффициента необратимой пластической деформации материала смеси, эадатчик 23 отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, усилители 24 и 25 мощности, управляющие электромагниты 26 и 27, редукционные клапаны 28 и 29, 2 з,п. ф-лы, 4 илдатчиком 23 отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, выход которого параллельно через усилители 24 и 25 мощности и управляющие электромагниты 26 и 27 связан с редукционными клапанами 28 и 29 задней пары гидроцилиндров 8 и 9.При этом йзмеритель 17 неровностей дорожного основания выполнен в виде шарнирно связанной с задней частью выглаживающей плиты 1 жесткой консоли 30, свободно, например с помощью колеса 31 (или лыжи), Опирающейся на дорожное основание под передней кромкой плиты 1, и 50 55 Изобретение относится к строительному и дорожному машиностроению, в частности к средствам автоматизации управления процессами возведения асфальтобетонных дорожных покрытий, 5Цель изобретения - повышение качества возводимого покрытия.На фиг. 1 изображена схема системы управления укладкой асфальта; на фиг. 2 - геометрическая схема деформации слоя ук ладываемого материала выглаживающей плитой асфальтоукладчика; на фиг. 3 - схема измерителя неровностей дорожного основания дороги, на фиг, 4 - структурная схема вычислительного блока системы, 15Система управления рабочим процессом асфальтоукладчика с выглаживающей плитой 1 и тяговыми брусьями 2 и 3 содержит переднюю пару гидроцилиндров 4 и 5 с электрозолотниками 6 и 7, связывающих ра му асфальтоукладчика с шарнирами тяговых брусьев 2 и 3, и заднюю пару гидроцилиндров 8 и 9, соединяющих раму асфальтоукладчика с задней частью выглаживающей плиты 1, задатчик 10 номинальной толщины 25 покрытия, а также измеритель 11 неровностей возводимого покрытия, связанный с копирным устройством 12 и выглаживающей плитой 1, Выход измерителя 11 подключен через первый компаратор 13 к 30 первому электрозолотнику 6 передней пары гидроцилиндров 4 и 5. На плите 1 закреплен датчик 14 поперечного уклона, связанный через второй компаратор 15, к которому подключен задатчик 16 поперечного уклона, 35 с вторым электрозолотником 7 передней пары гидроцилидров 4 и 5, С задней частью плиты 1 шарнирно связан измеритель 17 неровностей дорожного основания, подключенный к вычислительному блоку 18, со единенному с задатчиком 19 номинальной толщины покрцтйя, задатчиком 20 плотности асфальтобетонной смеси, задатчиком 21 требуемой плотности покрытия, задатчиком 22 коэффициента необратимой пластической деформации материала смеси и за ЕРБпдПсм где Янв - площадь рабочей поверхности выглаживающей плиты;г.пл - , силовое воздействие массы выглаживающей плиты;Псм - коэффициент необратимой пластической деформации материала смеси,При этом рабочая поверхность вьглаживающей плиты ориентируется в пространстве под равновесным углом йрввн атаки, определяемым с учетом геометрического понятия коэффициента относительной деформации Е Увх - Уо Увхвн. о+балл де У г о - требуемая толщина слоя;лв - размер выглаживающей плоскости плиты вдоль движения машины (продольный размер или длина плиты)как Уо Орввн" (3)пл ПсмЯпл - Рпл зависящим не только от свойств смеси, определяемых коэффициентом П,м, необходимой пластической деформации и конструктивных параметров Гпв, Япв, но и от толщины покрытия под задней кромкой плиты. В случае ровного основания, когда Уоокр = = Уо = сопзт, равновесный угол атаки не изменяется, при этом плотность покрытия Ъокр, равна требуемойрр и через равновесный угол и толщину слоя определяется вы- ражением барРлокр. =РгрГДЕ/3 м - ПЛОТНОСТЬси.(4) Уосфальтобетон и сме датчика 32 угла поворота консоли в шарнире относительно заданного положения, в частности потенциометра типа П,Вычислительный блок 18 содержит компаратор 33, сумматор 34, перемножители 35-37, сумматор 38, делитель 39 сигналов и масштабирующие блоки 40 и 41,Система работает следующим образом, В случае движения асфальтоукладчика по ровному основанию при укладке покрытия заданной толщины слой смеси Увх, поступающий под переднюю кромку плиты, сминается пропорционально коэффициенту е относительной деформации, зависящему от силового воздействия Епл массы плиты на смесьПри наезде ходовой части асфальтоукладчика на препятствие или во впадину в основании (неровность д У), шарниры тяговых брусьев 2 и 3 совместно с рамой и гидроцилиндрами вынуждены перемещаться в вертикальной плоскости, нарушая сложившееся на плите 1 равновесие сил и изменяя тем самым ее угол атаки,Плита 1 стремится изменить свое высотное положение (начинает тонуть или всплывать), однако сигнал, снимаемый с измерителя 11 неровностей возводимого покрытия и передаваемый через компаратор 13, включает электрозолотник 6 гидро- цилиндра 4, заставляет шарнир тягового бруса 2 вернуться в заданное копиром 12 положение, сохранив угол атаки плиты вблизи арлен, этого края плиты, Поперечный угол наклона плиты 1, появившийся при этом, фиксируется датчиком 14 поперечного уклона, выходной сигнал которого поступает через элемент 15 сравнения на электро- золотник 7 гидроцилиндра 5, Шток последнего под действием давления масла перемещает шарнир тягового бруса 3 до уровня, занимаемого шарниром тягового бруса 2. Таким образом, первоначально равновесный угол арлен. сохраняется по всей ширине плиты 1, сохраняется равновесие сил, действующих на плиту 1, и ее заданное положение в пространстве,Однако вследствие наличия неровностей д У основания, плотность возводимого покрытия, определяемая как араенпл + У +д УУРсм (5)Уо+ в этом случае не сохраняется постоянной и не равна заданной ртр.Для поддержания заданной величины рпокр в системе осуществляется управление равновесным углом арлен. посредством изменения силового воздействия массы плиты на смесь. Связь между требуемым силовым ВОЗДЕйСтВИЕМ Епл.треб, ВЕЛИЧИНОЙ НЕРОВНО- сти д У и требуемой величиной плотности покрытия рпокр находят на основании выражений (3) и (5) как Епл,треб =д ау а -а, Уо ртр+дУ(Ртр. - Рсм)(6)Это обеспечивается тем, что при подходе измерителя 17 неровностей дорожного основания к препятствию сигнал с него, пропорциональный величине неровности основания, подается на вычислительный(7) 10 Етр = Егц/Ь 15 20 К = Япл/Ь 25 30 35 40 45 50 55 блок 18, куда поступают и сигналы с задатчиков 19-23, На основании зависимости рассчитывается величина требуемого силового воздействия массы плиты на смесь и соответствующего корректирующего усилия Егц со стороны задних гидроцилиндров как или с учетом общей площади Я поршнейдвух задних гидроцилиндров требуемоедавление жидкости в их нагнетающих полостях Коэффициент масштаба К, устанавливаемый с задатчика 23, представляет собой при этом отношение площади выглаживэющей плиты 5 пл и общей площади 31 поршней двух задних гидроцилиндров асфальтоук- ладчика Сформированный в вычислительном блоке 18 сигнал подается на электронные усилители 24 и 25. Усиленные сигналы с помощью пропорциональных магнитов 26 и 27 управляют посредством редукционных клапанов 28 и 29 давлением в поршневых полостях гидроцилиндров 8 и 9 прямо пропорционально поданному сигналу Ртр, Суммарная сила (Епл + Егц), действующая на материал со стороны плиты 1, увеличивается (или уменьшается) по отношению к Епл и равновесие сил нарушается, Плита 1 вновь стремится занять более низкое положение, но за счет гидроцилиндров 4 и 5 высотное положение шарниров тяговых брусьев 2 и 3 становится выше, равновесный угол арлен. увеличивается и изменяется сила реакции материала на плиту 1 до равновесного состояния. При этом высотное положение задней кромки плиты 1 не изменяется, а плотность асфальтобетонной смеси сохраняется равной ртр заданной величине. В результате обеспечивается ровность поверхности и повышается долговечность покрытия.Формула изобретения 1. Система управления рабочим процессом асфальтоукладчика с выглэживающей плитой и тяговыми брусьями, содержащая переднюю пару гидроцилиндров с электро- золотниками, связывающими раму асфальтоукладчика с шарнирами тяговых брусьев, и заднюю пару гидроцилиндров, связывающих раму асфальтоукладчика с задней частью выглаживэющей плиты, два компаратора, задатчик толщины покрытия, вы 1694766ход которого подключен к первому входу первого компаратора, измеритель неровностей возводимого покрытия. который кинематически связан с копирным устройством и задней частью выглаживающей плиты и 5 подключен к второму входу первого компаратора, выход которого соединен с первым электрозолотником, и датчик поперечного уклона, который закреплен на вцглаживающей плите и подключен к первому входу 1 О второго компаратора, второй вход которого соединен с задатчиком поперечного уклона, а выход второго компаратора соединен с вторым электрозолотником, о т л и ч а ю щ ая с я тем, что, с целью повышения качества 15 возводимого покрытия, она снабжена измерителем неровностей дорожного основания, задатчиками номинальной толщины покрытия, плотности асфальтобетонной смеси, требуемой плотности покрытия, ко О эффициента необратимой пластической деформации материала смеси и отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, вычислительным блоком и по числу задних 25 гидроцилиндров усилителями мощности, управляющими электромагнитами и редукционными клапанами, причем вход измерителя неровностей дорожного основания кинематически связан с задней частью вы- ЗО глаживающей плиты, а выход - с первым входом вычислительного блока, второй, третий, четвертый, пятый и шестой входы которого соответственно соединены с задатчиками номинальной толщины покры тия, плотности асфальтобетонной смеси, требуемой плотности покрытия, коэффици. ента необратимой пластической деформации материала смеси и отношения площадей выглаживающей плиты и порш ней задней пары гидроцилиндров, а выходы вычислительного блока через соответствующие цепочки из последовательно соединенных усилителя мощности, управляющего электромагнита и редукционного клапана 45подключены к соответствующему заднему гидроцилиндру,.2. Система по п.1, от ли ч а ю ща я с я тем, что измеритель неровностей дорожного Основания Выполнен В Виде шарнирно СВЯЗВННОй С ЗВДНЕй ЧВСТЬЮ ВЬГЛатКИЬЭЮЩЕЙ плиты жесткОй кОнсОли с помОщью колеса или лыжи, Опирающейся на дорожное основание под передней кромкой выглаживаощей плиты, и датчика угла поворота консоли, установленного в шарнире на выглаживающей плите и имеющего кинематическую жесткую связь с жесткой консолью. 3. Система по и 2, от л и ч а ю щ а я с я тем, что вычислительный блок содержит комг 1 аратор, два сумматора, три перемножителя, делитель сигналов и два масштабирующих блока, причем первый вход первого сумматора, который является первым Входом вычислительного блока, подключен к первому входу первого перемножителя, второй вход первого сумматора, который является вторым входом вычислительного блока, подключен к первому входу Второго пере- множителя, первый Вход компаратора является третьим входом Вычислительного блока, второй вход компаратора, являющийся четвертым входом вычислительного блока, подключен к Второму Входу второго перемножителя, Выход которого соединсн с первым входом Второго сумматора, Второй вход которого соединен с Выходом первого перемножителя, второй вход которого и первый вход третьего перемножителя подключены к выходу компаратора, Второй вход третьего перемножителя соединен с Выходом первого сумма гора, Выход первого перемножителя подключен к второму Входу второго сумматора, Вьход которого соединен с первым Входом делителя сигналов, выход третьего перемножителя соединен с вторым Входом делителя сигналов, Выход которого соединен с первым Входом первого масштабирующего блока, второй вход которого является пятым входом Вычислительного блока, Выход первого мв. штабирующего блока соединен с первьгм входом второго масштабирующего алека, Второй ВхОд Котороо яляется шестым Входом Вычислительного блока, а выход Второго масштабирующего блока является выходом вычислительного блока.16947 бб Составитель М.Черенкованская Техред М.Моргентал Корректор Т.Пали Редактор М.Коб роиэводственно-издательский комбинат "Патент", г. Ужгород, у ина, 1 каэ 4136 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб.,4/5
СмотретьЗаявка
4709777, 26.06.1989
МОСКОВСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СТРОИТЕЛЬНОМУ И ДОРОЖНОМУ МАШИНОСТРОЕНИЮ "ВНИИСТРОЙДОРМАШ"
АФАНАСЬЕВ НИКОЛАЙ ИВАНОВИЧ, ГОРОХОВСКИЙ МИХАИЛ НАУМОВИЧ, ВАТУЕВ МИХАИЛ АНДРЕЕВИЧ, КАБАНОВ ВЯЧЕСЛАВ ВИКТОРОВИЧ, РОМАНЦОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ, РУФОВ ВАСИЛИЙ ЕГОРОВИЧ, САМАРИН ВИКТОР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: E01C 19/34
Метки: асфальтоукладчика, процессом, рабочим
Опубликовано: 30.11.1991
Код ссылки
<a href="https://patents.su/5-1694766-sistema-upravleniya-rabochim-processom-asfaltoukladchika.html" target="_blank" rel="follow" title="База патентов СССР">Система управления рабочим процессом асфальтоукладчика</a>
Плита покрытия

Номер патента: 808638
Опубликовано: 28.02.1981
Авторы: Крючков, Пицкель, Потапов, Приезжев, Розенблит, Сидоров, Соломаткин
...стекловаты и различные пенопласты.Ограждающие элементы б выполняют иэ волнистого асбестоцементного листа:который крепят к закладным деревянным рейкам 7, втопленным заподлицо с верхней горизонтальной гранью в во бетона ребер.Такое конструктивное выполнение плиты покрытия уменьшает на 15-20расход бетона на продольные и попереч ные ребра, причем внутренние попереч ные ребра исключаются эа счет включения в работу при нагружении плиты асбестоцементного волнистого листа.При соединении асбестоцементных листов к железобетонным ребрам исключается применение шурупов или других крепежных деталей, что обеспечивает снижение стоимости и трудоемкости изготовления плит.Панель покрытия повышает герметичность стыковых соединений и ее конструкция...
Плита покрытия

Номер патента: 1310492
Опубликовано: 15.05.1987
Авторы: Баранов, Вайсбанд, Зотова, Ковальчук, Курганский, Ломакин
...ей форму волны, и,удерживая в этом положении, прикрепляют к прогону 3. Далее плиту сновавыгибают и крепят к второму продольному ребру 1. Количество волн обшивки зависит от количества прогонов. При укладке древесно-волокнистыхплит следят за получением компенса 13104ционных зазоров, величина которых должна быть не менее 10 мм. Наличие зазора между верхними гранями поперечных диафрагм и впадинами волн обшивки обеспечивает последней свободу перемещений по ширине плиты при влажностных деформациях, Последующие плиты укладывают в той же последовательности с соблюдением требуемой величины нахлеста, Овальная форма 10 отверстий 12, которыми снабжены древесно-волокнистные плиты 4, обеспечивает последней необходимую для компенсации влажностных...
Структурная плита покрытия

Номер патента: 365444
Опубликовано: 01.01.1973
МПК: E04B 5/14
Метки: плита, покрытия, структурная
...образующие структуру плиты, могут быть соединены меж ду собой в центре параллелепипеда посредством пластин. Раскосные фермы представляют собой сборную конструкцию из единичных монтажных элементов 8. Монтажные элементы состоят из уголков на всю длину раскосной фермы, сваренных между собой решеткой в виде ряда пирамид по длине уголков. На вершинах пирамид, в месте соединения элементов решетки, приваривается пластина 4 для последующего соединения с пластиной верхнего монтажного элемента. Геометрическая неизменяемость уголков при сборке плиты обеспечивается временным кондуктором,Из единичных монтажных элементов собираются блоки - нижний и верхний - с поясами, составленными одиночными уголками при сборке элементов в блоки. Между...
Плита покрытия шпренгельного типа

Номер патента: 709777
Опубликовано: 15.01.1980
Автор: Хозяинов
Метки: плита, покрытия, типа, шпренгельного
...профиля), опорных швеллеров 9, которые крепятся к несущим продольным балкам 1 через определенное расчетом расстояние, гибких связей 10, раскрепляющих стойки 6, и колец 11, жестко прикрепленных к пространственной системе стоек и раскосов, через которые продеваются тяги 12, связующие гибкий нижний пояс. Тяги обьединяют пространственные системы стоек и раскосов в единую напряженную конструкцию. 1(репление тяги к концам несущих продольнь.х балок осуществляется с помощью соеди нительных элементоь, выполненных в виде металлических коробчатых захватов 13, снабженных ушками, удерживаюгцими несущие продольные балки от расщепления, и отверстием для установки болта.Для натяжения гибкого и нижнего пояса служат приспособления 14 для натяжения,...
Комплексная плита покрытия

Номер патента: 981535
Опубликовано: 15.12.1982
Авторы: Дрожжин, Кузьмук, Полтавцев, Хоменко
МПК: E04C 2/26
Метки: комплексная, плита, покрытия
...и закрывается Фиксирующей крышкой, наносится слой гидроизоляции 4 и также закрывается фиксирующей крышкой. Через патрубки в форме и крышке подается пар .с температурой: в форму 80-90 С и крышку 95-98 ОС, В случае прогрева теплоиэоляционной смеси электрическими нагревательными приборами (электротенами) крышка должна прогреваться до 120-130 ОС, После тепловой обработки иэделия поступают на пост распалубки и склад готовой продукции. Распалубка производится при температуре изделия не выше 60 С. Сначала отключают фиксаторы, затем поднимают крышку и отбрасывают борта Формы. При складировании и транспортировании утепленных плит применяются специальные прокладки, исключающие смятие и повреждение слоя тепло-гидроизоляции Примеры составов...
Предыдущий патент: Сборно-разборное деревянное покрытие
Следующий патент: Устройство для гашения колебаний пролетного строения моста
Случайный патент: Способ получения хромолого дубителя основного сульфата хрома