Устройство для дифференциального трансформирования плановых аэроснимков
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1392374
Автор: Антонов

Текст
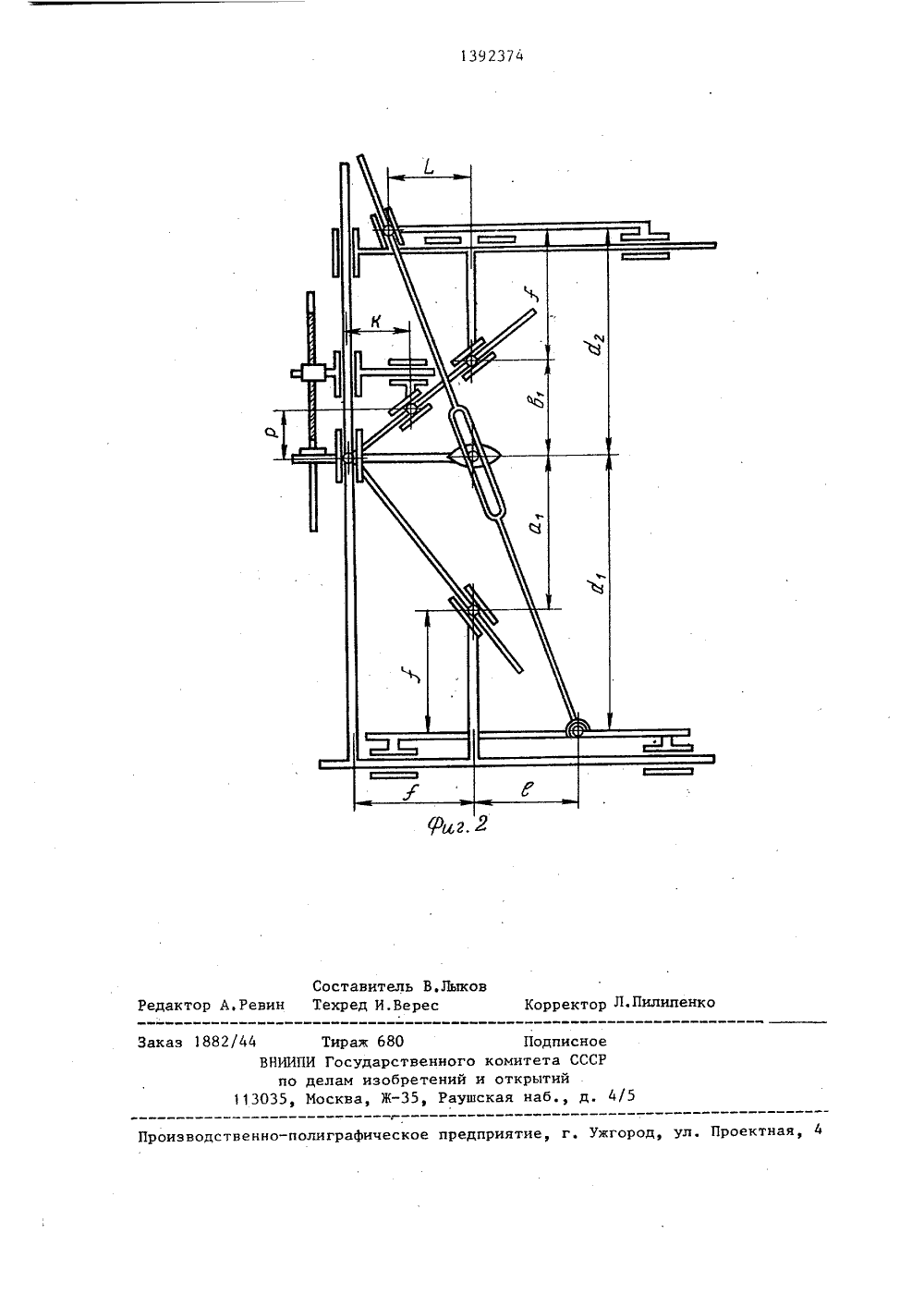
(191 (1 01 С 11/( РЕТЕНИ ИСАНИ В ИДЕТЕ А ВТОРСИОМ льноии стро е яййг225,с Йе Берег (РВ 7 ег 1 а8, р. 222Карл Цей ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИДОБРЕТЕНИЙ И ОТКРЫТИЙ(56) РЬоСоЕгмпиеСгспег) Кея 1 пяЬигцег, 7Ващеяеп. Вег 1 Ы, 19Каталог 14-6373 Нна, ГДР, 1973,(54) УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИАЛЬНОГО ТРАНСФОРМИРОВАНИЯ 11 ЛАНОВЬ 1 Х АЭРОСНИМКОВ(57) Изобретение относится к фотограмметрическому приборостроению ипозволяет повысить экономичностьустр-ва за счет снижения затрат наизготовление блока изменения увеличения. На каретке 21, установленнойна направляющих 22 с возможностью перемещения в вертикальной плоскости,закреплена ось линеек 23 и 24 прямо1392374 ка. Смещение Р-каретки 4 на величи"ну горизонтального параллакса осуществляется ходовым винтом 10 путемвращения штурвала 13. В средней части ленкеры 35, 36 соединены с четырьмя круглыми стержнями 37, лежащимив плоскости объектива 20. 2 ил. угольного инверсора. Воздействиемлинейки 24 на ролик 27 перемещаетсякаретка 30 плоскости экрана 29. Механизм привода экрана 29 выполнен ввиде ленкеров,35, 36, нижние концыкоторых посредством шаровых шарнировзакреплены на каретке 5 левого снимИзобретение относится к фотограм- новленным на валу штурвала 13 продольметрическому приборостроению, а бо- ного параллакса. Каретка 5 левого лее конкретно - к дифференциальным снимка соединена с гайкой отдельного оптико-механическим фототрансформа- ходового винта, подшипники которого торам, и может быть использовано для 5 также закреплены на У-каретке 3. Катрансформирования плановых аэросним- ретка 5 имеет устройство для фиксиков с целью получения ортофотосним- рования ее на направляющих (ходовой ков. винт с гайкой каретки 5 и устройство ройства путем исключения вычислителя.10.Цель изобретения - упрощение уст ее фиксации на фиг. 1 не показаны).Наблюдательная система состоитНа фиг. 1 изображено предлагаемое из двух оптических систем с осветите- устройство, аксонометрия; на фиг,2 - лями. Каждая из систем состоит из схема проектора. треугольных призм 14, и 15, объективаУстройство содержит стереоизмери, сетки 17 и окуляра 18, В левой тельный блок, выполненный в виде че оптической системе вместо первой третырехкареточного трехярусного стерео угольной призмы установлен куб 19 со компаратора с неподвижной наблюда- светоделительной диагональной гранью, тельной системой, и состоит из стани- Объектив 16 правой оптической систены 1, Х-каретки 2, У-каретки 3, Р" мы установлен на направляющих с целью каретки 4 и каретки 5 левого снимка. 20 обеспечения возможности перемещенияВ первом ярусе на направляющих его по оси У для устранения влияния станины 1 находится основная Х-карет- поперечного параллакса, при этом в ка 2, соединенная с гайкой 6 ходово- ход лучей введена телескопическая го.винта 7, с помощью которого Х-ка система.ретка 2 перемещается параллельно оси 25 Узел дифференциального трансформи- Х устройства. рования состоит из фронтального проНа Х-каретке 2 параллельно оси У ектора с масштабным инверсором и меустройства закреплены направляющие, ханизмом привода экрана. в которых находится каретка второго Фронтальный проектор состоит из яруса, - У-каретка 3, соединенная с 30 объектива 20, закрепленного на карет- гайкой 8 ходового винта 9, подшипники ке 21 инверсора на расстоянии Г (1 которого также закреплены на Х-карет- Фокусное расстояние объектива 20) от ке 2, направляющих 22 (по оси Х), по котоНа У-каретке 3 параллельно оси Х рым каретка 21 может перемещаться закреплены направляющие, в которых 35 в вертикальной плоскости, На карет- находятся две каретки третьего яру- ке 21 закреплена ось линеек 23 и 24 са - Р-каретка 4 продольных параллак- прямоугольного инверсора. Линейка 23 сов и каретка 5 левого снимка. Р-ка- "ножницами" постоянно прижата к ролиретка 4 соединена с гайкой (не пока- ку 25, ось которого закреплена на зана) ходового винта 10, подшипники 40 стойке 26 на расстоянии г (по оси Е) которого закреплены на У-каретке 3. от плоскости левого снимка. Стойка Ходовой винт 10 соединен с валом сель" 26 закреплена на станине 1 устрой- сина 11, который электрически соеди- ства. Линейка 24 постоянно прижата к нен с задающим сельсином 12, уста- ролику 27, ось которого закреплена.3на стойке 28 на расстоянии Г ,по осиХ) от плоскости экрана 29. Гтойка 28закреплена на каретке 30 и несущейплоскостью экрана способна перемещаться по направлявшим 22 в нертиЬкальной плоскости. К ребру линейки 24прижат "ножницами" также и ролик 31,ось которого установлена на малойкаретке 32, находящейся на направляющей 22 и имевщей воэможность перемещения по оси Е, На каретке 32закреплена гайка ходового винта 33,который зубчатой передачей соединенс валом штурвала 13 ручного приводаР-каретки. Ролик 31 с помощьв винта34 может перемещаться по малой каретке 32 в направлении оси Х и фик-,сироваться в различных положениях.Механизм привода экрана состоитиз ленкеров 35 и 36, нижние концыкоторых с помощьв шаровых шарниров,расположенных в плоскости снимков,закреплены на каретке 5 левого снимка. Верхние концы ленкеров скользящи" 25щими шарнирами соединены с плоскостью экрана, что позволяет ленкерам перемещаться относительно плоскости экрана 29, В средней части ленкеры двойные и насажены на стержни3037, лежащие в плоскости объектива 20параллельно осям Х и У устройства,являющиеся осями вращения ленкеров.Плоскость экрана 29 в горизонтальнойплоскости перемещается по двум взаимно перпендиКулярным направляющим, З 5закрепленным на каретке 30В целом устройство построено последующей схеме: снимок и экран имеют противоположное направление движения в горизонтальной плоскости, Объ - 4 Оектив, щель и осветитель в горизонтальной плоскости неподвижны, Изменения масштаба проектирования и одновременно сохранение резкости изображения обеспечивается прямоугольным 45инверсором с неподвижной плоскостьюснимка Р, перемещающимся по оси Е,объективом и плоскостью экрана. Привод инверсора осуществляется на экранную линейку инверсора от винта 50продольного параллакса,Устройство работает следующим образом.При стереоскопическом наведенииизмерительной марки на произвольную 55точку А местности, изобразившуюсяна левом фотоснимке в точке с координатами Х, и У имеющей горизонтальный параллакс Р, вращают штур 4 4вал 13 до тех пор, пока Р-каретка 4 через сельсиннув пару (сельсины 11 и 12) не сместится ходовым винтом относительно нулевого положения на величину Р Одновременно с этим вращение штурвала 13 вызывает вращсние ходового винта 33, что изменяет положение ролика 31 и линеек 23 и 24 прямоугольного инверсора, а так как одиниз подшипников ходового винта 33 закреплен на каретке 21, а его гайка " на каретке 32, то расстояние между осью вращения ролика 31 по оси Е всегда будет равна величине Р (ходовые винты 10 и 33 должны иметь одинаковый шаг), Ролик 25 установлен на неподвижной стойке 26, следовательно, измене" ние положения линеек инверсора может происходить только путем перемещения каретки 21 вместе с осью вращения линеек по направляющим 22 с одновременным поворотом их вокруг оси. При этом линейка 24, действуя на ролик 27, перемещает в вертикальной плоскости каретку 30 экранной плоскости. При этом .постоянно выполняется условие ортотрансформирования: масштаб изображения, проектируемого объективом 20 с левого негатива на плоскость экрана, постоянный и равен М. Это условие можно записать следующим образом:ш. Ч;=М,где М - масштаб изображения в плоскости проекции;ш, - масштаб в -й точке левогофотоснимка;ч; - увеличение.Как известно, масштаб в точке на аэроснимке равенгде В - базис фотографирования;Р, - горизонтальный параллаксточки,Увеличение проектирующей системыравногде а- расстояние от главной точкиобъектива до плоскости экрана;а- то же, до плоскости снимка.Так как расстояние от роликов 25 и 27 до аэронегатива и плоскости проекции равно 1 (фиг. 2),то30 К=В М где Г - фокусное расстояние объектива. 5Расстояние Ъ, (Фиг. 2) равно Расстояние а, для прямоугольногоинверсора равно Г Ка =: ар.1 1Подстановка этих значений в формуле увеличения проектируемой системыдает:+Р7ГК КК+Р, 1 КР; Условие ортотрансформирования мож.- но записать в следующем виде: Следовательно, оно постоянно выполняется в устройстве при условии,Перенос изображения с рабочей площади стереопары производится участками путем сканирования негатива полосами, при этом смещение измерительной марки по, оси Х на величину Х, одновременно сместит на величину Хшаровой шарнир ленкера 36, при этом он повернется вокруг стержня 37 и верхним концом сместит плоскость эк" рана 29 по оси Х в противоположном направлении на величину, равную а; Р, Р,т,е. уравнение ХФактически решается в масштабе М.Аналогично, смещение плоскости левого снимка по оси У на некоторую величину У приводит к смещению плоскости экрана в противоположном направлении на величину, в 7 раз боль" шую. При изменении увеличения проектирующей системы изменяется положение стержней 37, следовательно, н изменяется увеличение транспортного механизма каретки экрана, Режим работы устройства "ОПпг", Для удобства сканирования площади снимка привод Х-каретки и У-каретки снабжается электродвигателями (не показаны).Использование в предлагаемом устройстве в качестве основы не универсального прибора, а стереокомпараторной измерительной части значительно упрощает (по сравнению с известными) конструкцию устройства и в несколько раз снижает стоимость его изготовления. Формула изобретения Устройство для дифференциального трансйормирования плановых аэроснимков, содержащее станину, стереоизмерительный блок с наблюдательной системой, проекционный объектив, блок изменения увеличения, кассету и блок перемещения кассеты, о т л и ч а - ю щ е е с я тем, что, с целью повышения экономичности за счет снижения затрат на изготовление блока изменения увеличения, стереоизмерительный блок выполнен дополнительно с У-кареткой с ходовым винтом, оптическая наблюдательная система выполнена неподвижной, блок изменения увеличений выполнен в виде первой и второй направляющих, первой каретки с четырьмя круглыми стержнями, объективом, двумя жестко соединенными под прямым углом линейками, закрепленными на первой каретке с возможностью вращения, второй каретки с роликом, первая и вторая каретки кинематически соединены с ходовым винтом продольных параллаксов, станина выполнена со стойкой и роликом связи, кассета выполнена с третьей кареткой, первая и третья каретки закреплены соответственно на первой и второй направляющих с возможностью перемещения, механизм перемещения кассеты выполнен в виде четырех ленкеров, нижние концы которых закреплены в плоскости левого снимка на шаровых шарнирах, верхние концы соединены с кареткой кассеты муфтами, а в средней части ленкеры соединены с четырьмя круглыми стержнями шарнирными соединениями.1392374 ектор Л.Пил к 2/ Зак аж 6 ВНИИ 5 113 кая наб., д еско я Редактор А.Реви Оизводственно-пол Составитель В.ЛыковТехред И,Верес Государственногелам изобретенийосква, Ж, Рауш Подписноомитета СССоткрытий г. Ужгород, ул. Проектна
СмотретьЗаявка
4029434, 18.10.1985
УСТЬ-КАМЕНОГОРСКИЙ СТРОИТЕЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ
АНТОНОВ ВАЛЕРИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G01C 11/00
Метки: аэроснимков, дифференциального, плановых, трансформирования
Опубликовано: 30.04.1988
Код ссылки
<a href="https://patents.su/5-1392374-ustrojjstvo-dlya-differencialnogo-transformirovaniya-planovykh-aehrosnimkov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для дифференциального трансформирования плановых аэроснимков</a>
Устройство для измерения толщины покрытия катода цветного кинескопа

Номер патента: 1711257
Опубликовано: 07.02.1992
Авторы: Дубинин, Кузнецов, Махтин, Тамарченко
МПК: H01J 9/42
Метки: катода, кинескопа, покрытия, толщины, цветного
...положение измерительного узла 4 определяется упором 26; при этом устанавливается определенный: 35 зазор между торцами пневматического со.- пла 23 и оправки 2. Величина этого зазора рассчитывается как сумма толщины дна катода 3, толщины покрытия катода 3 и измерительного зазора . 40 Отклонение толщины покрытия от но-. минала регистрируется . измерительными приборами 25, которые выдают девять дис-. кретных электрических сигналов в. зависи-;мости от величины отклонения от номинала 45 по толщине покрытия. В соответствии с величиной сигнала зажигается одна из лампочек 27 пульта 28, выполненного в виде ступенек. Крайние группы, обозначенные знаком "0", соответствуют браку по минимуму и максимуму, а остальные семь групп. - .годным катодом. В...
Радиогеодезическая фазовая аппаратура для автоматической записи промерных галсов при производстве русловых речных съемок

Номер патента: 479064
Опубликовано: 30.07.1975
Авторы: Зубков, Куделько, Шмерлинг
МПК: G01S 9/00
Метки: автоматической, аппаратура, галсов, записи, производстве, промерных, радиогеодезическая, речных, русловых, съемок, фазовая
...фазовращатель 7 на угол, соответствующий разности фаз между частотами 30 сравнения Г, и Г,. Таким образом обеспечи3дается непрерывный счет циклов разности фаз сравниваемых колебаний, Редуктор 9 приводит также во вращение червячный винт 10, по которому при вращении его перемещается иодвикная каретка 11 с пишущим устройством. Редуктор сконструирован таким образом, что дистанция, пройденная плавсредством, фиксируется в одежном из трех масштабов 1:1000, 1;2000 и 1:5000.Сигнал , ведущего передатчика (бортовая ведомая радиостанция 1 Ъ) принимает приемник 12 и с помощью трансформатора 13 частоты, выполненного по схеме регенеративного делителя, преобразуется в частоту , которой возбуждается передатчик 14 этой станции,Для связи между...
Каретка для механизированного горочного башмака

Номер патента: 108203
Опубликовано: 01.01.1957
Автор: Загурский
МПК: B61K 7/06
Метки: башмака, горочного, каретка, механизированного
...положение совершаются автоматически. С целью осуществления переменного юза, поворотный вокруг горизонтальной оси башмак монтирован на поворотной вокруг вертикальной оси плите, а для удержания плиты в процессе торможения от поворота в направляющей плиту стойке на каретке предусмотрена защелка, взаимодействующая с плитой.На чертеже в трех проекциях изображена описываемая конструкция каретки к механизированному горочному башмаку с жесткой неподвижной направляющей балкой. Каретка направляется вдоль рельса с помощью рельса 1 и направляющего угольника 2, которые жестко соединяются между собой подкладками 3 при помощи болтов.Каретка состоит из несущей каретки 4 с приваренной осью 5 и направляющей стойки б с отверстием для запирающего ригеля 7....
Каретка для перемещения краскораспылителя

Номер патента: 553008
Опубликовано: 05.04.1977
Автор: Норкин
МПК: B05B 15/06
Метки: каретка, краскораспылителя, перемещения
...изобретения - повышение удобства ее и эксплуатации,Для достижения этого каретка снабжена установленным в полуосях аксиально им стягивающим винтом, а направляющие выполнены с отверстиями.Такое выполнение обеспечивает легкость установки каретки в направляющую путем ИЯ КРАСКОРАСПЫЛИТЕЛЯ стягивания полуосе о причемполуоси ие будут от ту са поддействием распорио 1 учас демонтажа каретки,5 На чертеже изображена предлагаемая каретка, разрез.Каретка содержит корпус 1, в котором свозмо)кностью относительно поворота и перемещения смонтированы полые полуоси 2 и 3,10 свободные концы которых вьполисиы в нидевило и одна из иих входит в другуо,На концах полуосей установлены ролики 4,которые при помощи распориого элемента, например пужины...
Стереокомпаратор

Номер патента: 987386
Опубликовано: 07.01.1983
МПК: G01C 11/04
Метки: стереокомпаратор
...4 стекла имеют при горизонтальном расположении кареток (фиг.З, б и 7) одинаковую толщину. Каждая иэ кареток 1 и 2 имеет по четыре Ч-образные опоры 5 и б, а каждая опора включает в себя два ролика. При этом для одной из кареток, например 1, ролики 5 опор установлены на внешних, а для другой каретки, например 2, ролики б установлены на внутренних сторонах одной общей пары направляющих 7 и 8. Направляющие 7 и 8 выполнены цилиндрическими, Каретки 1 и 2 аэроснимков при помощи гаек 9 и 10 и измерительных винтов 11 и 12 связаны с аналого-цифровыми преобразователями 13 и 14, а также с приводами Х) и Хп, например, ручными штурвалами. Измерительная система стереокомпаратора включает в себя две прямоугольные прнэмы 15 и два обьектива 16,...
Предыдущий патент: Устройство для измерения угла наклона
Следующий патент: Автоматический дозатор жидкости
Случайный патент: Устройство для пересчета импульсов