Зубообрабатывающий модуль
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
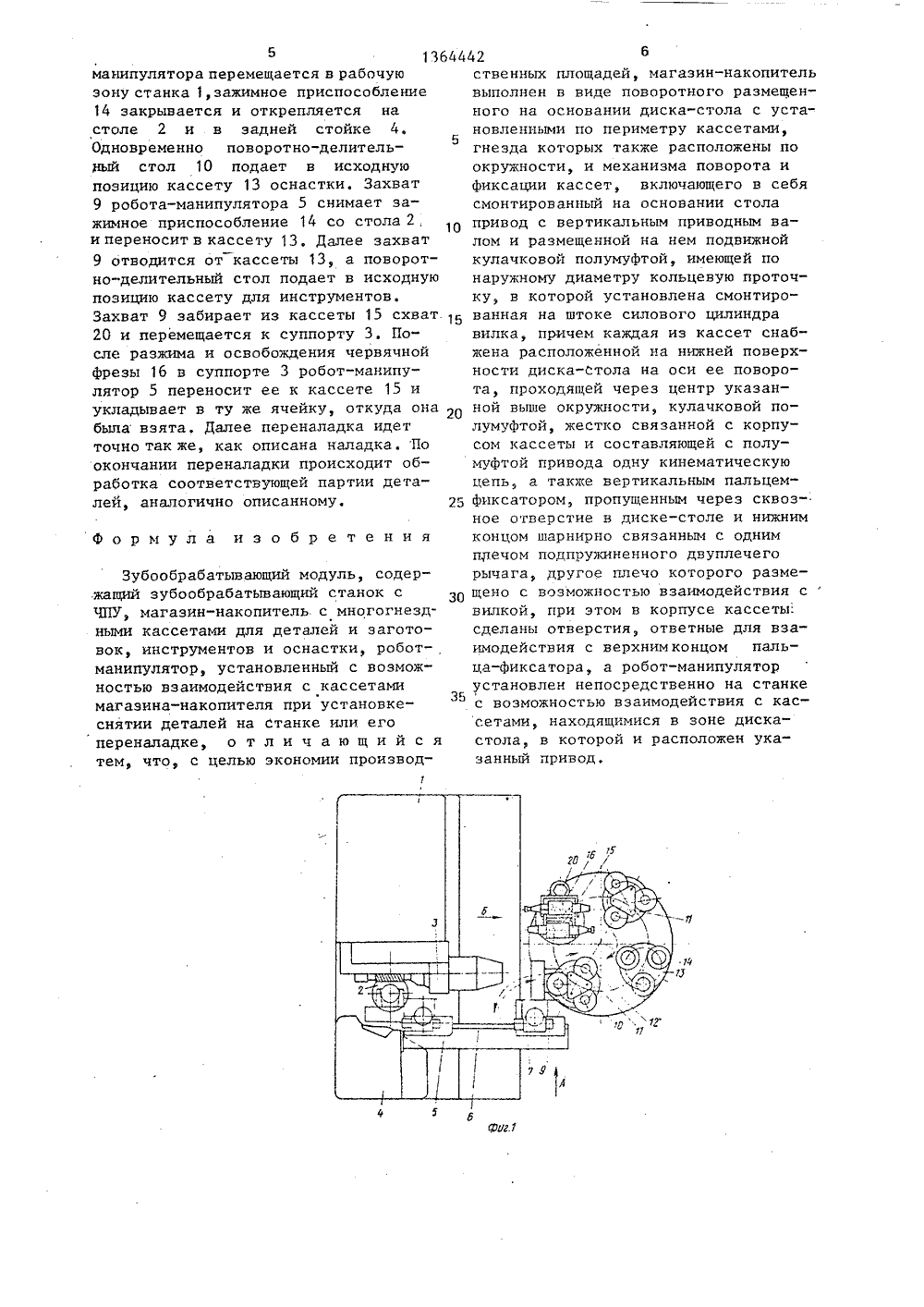
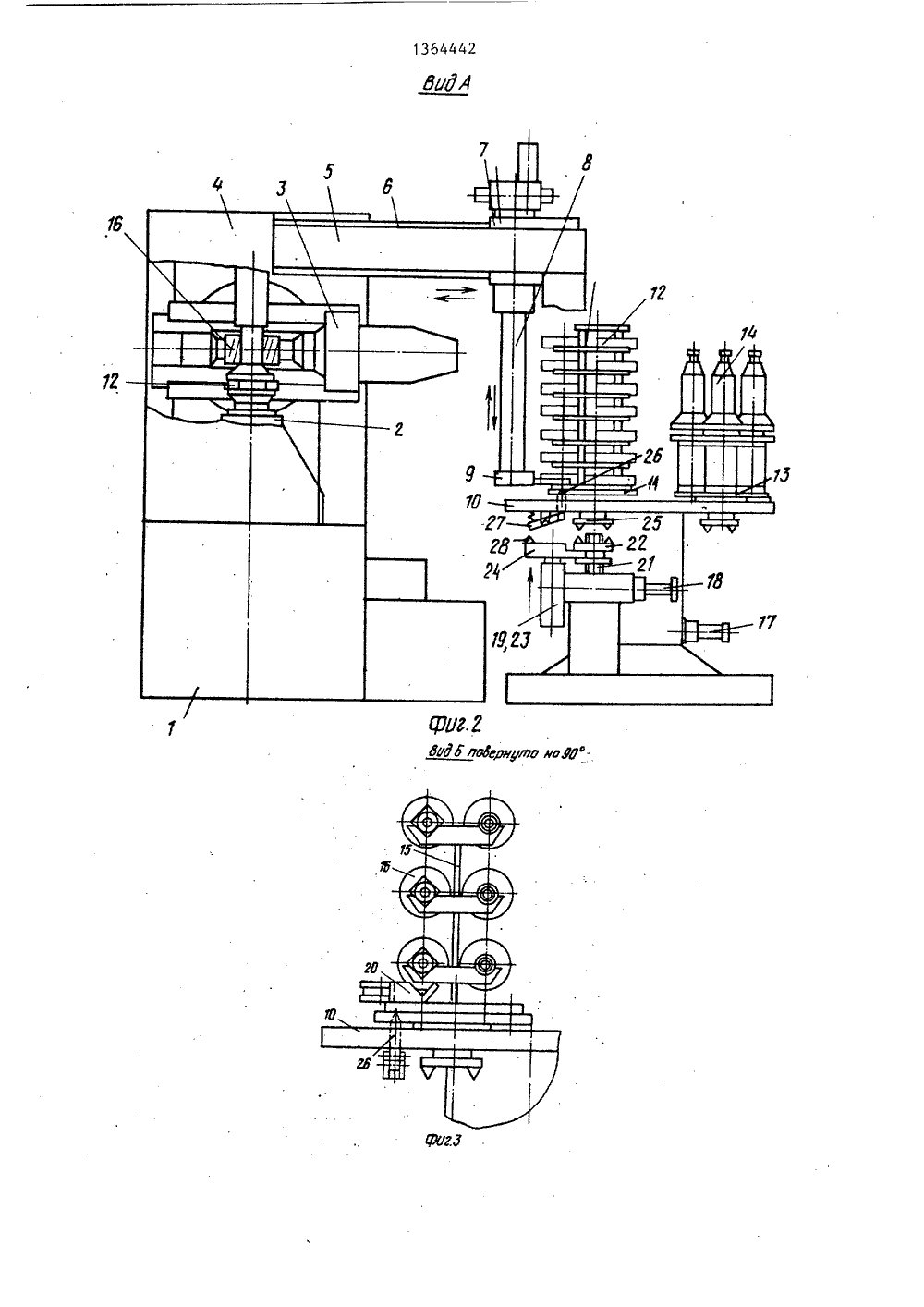
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК ггг 94 0 54) ЗУБООБРАБАТЫВ МОДУ предскве "Ме ОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ ОПИСАНИЕ ИЗОБР А ВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Витебское специальное конструкторское бюро зубообрабатывающих, шлифовальных и заточных станков(56) Проспект Ф. Либхерр-Холдин (ФРГна зубообрабатывакиций центрставленный на выставке в Моталлообработка"(57) Изобретение относится к областимашиностроения и может быть использовано при автоматизированном производстве зубчатых колес. Цель изобретения - экономия производственныхплощадей за счет установки роботаманипулятора непосредственно на станке и обеспечения возможности его взаимодействия с отдельно стоящим магазином-накопителем в одной его зоне,Зубообрабатывающий модуль содержит1364442 станок 1 с ЧПУ, сменные кассеты 11,13, 15 для обрабатываемых деталей 12,оснастки и режущего инструмента счервячными фрезами 16, установленныена поворотно-делительном столе 10.Для поворота кассет установлен механизм поворота и фиксации, включающийделительный механизм 18, содержащийприводной вал 21 с размещенной на немполумуфтой 22 с возможностью переИзобретение относится к машиностроению и может быть использованопри автоматизированном производствезубчатых колес,Цель изобретения - экономия производственных площадей за счет установки робота-манипулятора непосредственно на станке и обеспечения возможности его взаимодействия с отдельно стоящим магазином-накопителем в 10одной его зоне,На фиг, 1 изображен зубообрабатывающий модуль, вид в плане; наФиг. 2 - вид А на фиг, 1; на фиг. 3 вил Б на Фиг, 1; на фиг. 4 - модуль 15в пространстве, общий вид.Зубообрабатывающий модуль содержит зубофрезерный станок 1 с ЧПУ,имеющий стол 2, суппорт 3 и заднююстойку 4, робот-манипулятор 5, прикрепленный одним концом горизонтальной направляющей 6 к стойке 4. Понаправляющей 6 манипулятора 5 перемещается каретка 7 со штангой 8, книжнему концу которой прикреплен захват 9. Перемещение каретки 7 по направляющей 6 осуществляется на постоянную величину между упорами, Штанга 8 с захватом 9 перемещается вертикально в каретке 7 по заданной программе и поворачивается на 90 междуупорами, Справа от станка 1 размещенмагазин в виде поворотно-делительногостола 10, несущий четыре поворотных,из которых две сменные кассеты 11с обрабатываемыми деталями 12, кассета 13 для оснастки с зажимными приспособлениями 14, кассета 15 для инструмента с червячными фрезами 16.Стол 10 получает периодические пово мещения от вилки 24, смонтированнойна силовом цилиндре 23. На кассетахимеются соответствующие полумуфты25, взаимодействующие с полумуфтой22 в зоне взаимодействия магазина-на"копителя с роботом-манипулятором 5.Для Фиксации в определенном угловомположении в столе 10 установленыпальцы-фиксаторы, Фиксирующие кассеты11 13, 15. 4 ил,роты от делительного механизма 17, Под поворотно-делительным столом 10 в исходной позиции (ближайшей к роббту-манипулятору 5), занимаемой каждой кассетой при поворотах стола 10, стационарно расположен делительный механизм 18 с устройством 19 сцепления, В кассете 15 для инструмента имеется схват 20, с помощью которого робот-манипулятор 5 переносит червяч. ные фрезы 16Делительный механизм 18 имеет вертикально расположенный приводной вал 21, в котором размещена кулачковая полумуфта 22, По наружному диаметру последней выполнена кольцевая проточка, в которой располагается смонтированная на силовом цилиндре 23 устройства .19 сцепления вилка 24, Каждая из кассет снабжена кулачковой полумуфтой 25, установленной с нижней стороны стола 10 и составляющей с полумуфтой 22 при их сцеплении кинематическую цепь поворота кассеты,Механизм поворота и фиксации кассет на столе также включает в себя вертикальные пальцы-фиксаторы 26, пропущенные через сквозные отверстия в столе, при этом каждый палец-фиксатор 26 шарнирно связан нижним концом с одним плечом подпружиненного двуплечего рычага 27, второе плечо которого взаимодействует с вилкой 24, на верхней поверхности последней закреплен для этого упор 28. В корпусе каждой кассеты выполнены отверстия, ответные для взаимодействия с пальцем-фиксатором 26 при фиксации кассеты в определенном угловом положении.64442 10 15 20 25 30 35 40 45 50 55 з 13Модуль работает следующим образом.В программе работы модуля предусмотрены циклы по наладке или переналадке его на обработку данного типоразмера деталей и циклы по обработке этих деталей. В исходном состоянии в суппорте 3 станка 1 нет инструмента, а на столе 2 нет зажимногоприспособления. Каретка 7 робота-манипулятора 5 находится в зоне взаимодействия его с кассетами,Работает модуль в соответствии с .автоматически вызванной управляющейпрограммой, Начинается она с автоматической наладки, которая осуществляется в следующем порядке. Делительным механизмом 17 поворотно-делительный стол 10 поворачивается ивыносит кассету 15 в исходную позицию, Робот-манипулятор 5 захватом 9берет схват 20 и выносит его из кассеты 15. Если требуемая червячнаяфреза 16 находится вкассете 15 спротивоположной от робота-манипулятора стороны, то включается устройство19, которое сцепляет делительный механизм 18 с кассетой 15, одновременно расфиксировав ее, Делительный механизм 18 поворачивает касеету 15.Робот-манипулятор 5 схватом 20 снимает в кассете 15 необходимую фрезу 16и переносит в станок 1 к суппорту 3.После зажима фрезы 16 в суппорте 3робот-манипулятор возвращает схват20 в кассету 15. Устройство 19 расцепляет делительный механизм 18 скассетой 15, последняя одновременнофиксируется. Далее поворотно-делительный стол 10 делительным механизмом 17 поворачивается и вносит висходную позицию кассету 13 с зажимными приспособлениями 14, Как и вслучае с кассетой для инструмента,если требуемое зажимное приспособление 14 находится не со стороны робота-манипулятора 5, то срабатываетустройство 19, и делительным механизмом 18 кассета 13 устанавливаетсяв требуемое положение,Робот-манипулятор 5 схватом 9 забирает из кассеты 13 зажимное приспособление 14, переносит в станок 1и устанавливает на столе 2. После закрепления зажимного приспособления14 на столе 2 и в задней стойке 4зажимное приспособление раскрываетсяи каретка 7 робота-манипулятора возвращается к магазину, Одновременно поворотно-делительный стол 10 поворачивается и вносит одну из кассет 11 в исходную позицию, включается устройство 19 и сцепляет с кассетой делительный механизм 18, В это же время узлы станка 1 устанавливаются в заданное программой исходное положение, предусмотренное для обработки данной детали. Далее модуль работает по циклу загрузки-выгрузки и обработки данной партии деталей,Робот-манипулятор 5 схватом 9 берет из кассеты 11, начиная, например, с верхнего яруса, деталь 2, вносит в рабочую зону и устанавливает на нижней части зажимного приспособления 14, Губки схвата 9 разводятся, деталь 12 в приспособлении 14 зажимается и обрабатывается. После обработки зажимное приспособление 14 раскрывается, губки схвата 9 сходятся, робот-манипулятор снимает обработанную деталь 12 с нижней части приспособления 14 и возвращает в кассету 11 на свое место. Затем схват 9 берет деталь 12 иэ следующего яруса кассеты 11, и цикл повторяется. Когда детали 12 со всех ярусов данной стороны обработаны, включается делительный механизм 18 и поворачивает кассету 11 на одну позицию, Происходит загрузка-выгрузка и обработка всех деталей 12 с этой стороны кассеты, которая завершаетсяочередным поворотом кассеты 11, После обработки всех деталей 12 кассеты 11, если детали данного типо-.размера размещены и во второй кассете 11, поворотно-делительный стол10 поворачивается на 180 О и подаетв зону действия робота-манипулятора5 вторую кассету 11. Обработка деталей 12 продолжается, как было описано, Кассета 11 с обработанными деталями 12 на противоположной стороне поворотно-делительного стола снимается и заменяется на кассету с заготовками этой же партии или другого типоразмера другой партии. После завершения обработки очередной партии деталей происходит переналадка модуля на обработку следующей партии в соответствии с заданной управляющей программой,При переналадке вначале узлы станка занимают необходимое для этого положение. После этого захват 9 робота5136 манипулятора перемещается в рабочую зону станка 1, зажимное приспособление 14 закрывается и открепляется на столе 2 и в задней стойке 4.Одновременно поворотно-делительиый стол 10 подает в исходную позицию кассету 13 оснастки, Захват 9 робота-манипулятора 5 снимает зажимное приспособление 14 со стола 2, и переносит в кассету 13. Далее захват 9 отводится от кассеты 13, а поворот- но-делительный стол подает в исходную позицию кассету для инструментов.Захват 9 забирает из кассеты 15 схват.20 и перемещается к суппорту 3. После разжима и освобождения червячной Фрезы 16 в суппорте 3 робот-манипулятор 5 переносит ее к кассете 15 и укладывает в ту же ячейку, откуда она была взята. Далее переналадка идет точно так же, как описана наладка. По окончании переналадки происходит обработка соответствующей партии деталей, аналогично описанному. формула изобретенияЗубообрабатывающий модуль, содержащий зубообрабатывающий станок с ЧПУ, магазин-накопитель с многогнездными кассетами для деталей и заготовок, инструментов и оснастки, робот- манипулятор, установленный с возможностью взаимодействия с кассетами магазина-накопителя при установке- снятии деталей на станке или его переналадке, о т л и ч а ю щ и й с я тем, что, с целью экономии производ 4442ественных площадей, магазин-накопительвыполнен в виде поворотного размещенного на основании диска-стола с установленными по периметру кассетами,5гнезда которых также расположены поокружности, и механизма поворота ификсации кассет, включающего в себясмонтированный на основании столаО привод с вертикальным приводным валом и размещенной на нем подвижнойкулачковой полумуфтой, имеющей понаружному диаметру кольцевую проточку, в которой установлена смонтированная на штоке силового цилиндравилка, причем каждая из кассет снабжена расположенной на нижней поверхности диска-Стола на оси ее поворота, проходящей через центр указанной выше окружности, кулачковой полумуфтой, жестко связанной с корпусом кассеты и составляющей с полумуфтой привода одну кинематическуюцепь, а также вертикальным пальцем 2- фиксатором, пропущенным через сквоз-.ное отверстие в диске-столе и нижнимконцом шарнирно связанным с однимппечом подпружиненного двуплечегорычага, другое плечо которого размеЗО щено с возможностью взаимодействия свилкой, при этом в корпусе кассеты:сделаны отверстия, ответные для взащодействия с верхнимконцом пальца-фиксатора, а робот-манипуляторустановлен непосредственно на станкес возможностью взаимодействия с кассетами, находящимися в зоне дискастола, в которой и расположен указанный привод,
СмотретьЗаявка
4105094, 12.08.1986
ВИТЕБСКОЕ СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ЗУБООБРАБАТЫВАЮЩИХ, ШЛИФОВАЛЬНЫХ И ЗАТОЧНЫХ СТАНКОВ
СТАРЦЕВ НИКОЛАЙ КОНСТАНТИНОВИЧ, ШТЕЙМАН МОИСЕЙ МАКСИМОВИЧ, ВАСИЛЬЕВ АРКАДИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B23Q 41/00
Метки: зубообрабатывающий, модуль
Опубликовано: 07.01.1988
Код ссылки
<a href="https://patents.su/5-1364442-zuboobrabatyvayushhijj-modul.html" target="_blank" rel="follow" title="База патентов СССР">Зубообрабатывающий модуль</a>
Привод модуля промышленного робота

Номер патента: 1349999
Опубликовано: 07.11.1987
МПК: B25J 9/14
Метки: модуля, привод, промышленного, робота
...3 управляется, например, с помощью электромагнитов, обмотки которых соединены с контактами программного устройства или путевых включателей (не показаны). женное на чертеже, и перекрывает все магистрали. Поршень и исполнительный орган продолжают движение вправо под действием сил инерции. Во время этого движения штоковая полость силового цилиндра 1 заполняется рабочей средой из емкости 6 через обратный клапан 5, а рабочая среда из поршневой полости вытесняется через обратный клапан 7 в аккумулятор 9,заряжая его. В результате сжатия упругого элемента аккумулятора 9 (газа или пружины) увеличивается давление в поршневой полости и соответственно сопротивление перемещению поршня, что приводит к остановке поршня и связанного с ним...
Дискретный поворотный привод манипулятора

Номер патента: 787171
Опубликовано: 15.12.1980
МПК: B25J 9/00
Метки: дискретный, манипулятора, поворотный, привод
...в кронштейнах 19.Привод работает следуюшим образом.За исходное положение диска 4 принято такое, когда штырь 13 находится в отверстии 5 под действием давле" ния, поданного в штуцер 18. При необходимости повернуть диск 4 и связанный с ним вал 1 на угол с 4,787171в верхнюю камеру корпуса 7 цилиндра через канал 9 штока 8 подается давление, а давление в штуцере 18 штыря 13 отключается, и последний под действием пружины выходит из отверстия 5, освобождая диск 4Одновременно подачей давления включается штырь 141 который упирается в диск 4. Последний поворачивается на угол с(., при этом штырь 14 попадает в ближайшее отверстие своей окружности и затормаживает диск. Для поворота диска 4 на угол с отключается штырь 14и включается штырь 15,...
Поворотная колонна манипулятора

Номер патента: 1682489
Опубликовано: 07.10.1991
Авторы: Демин, Доманский, Зиннатуллин, Корнюшенко, Кузнецов, Лапко, Судницын, Цареградский, Шибанов
МПК: E02F 9/12
Метки: колонна, манипулятора, поворотная
...с неподвижной стойкой 1 солнечного колеса 11, из соединенного жестко с корпусом 2 эпициклического колеса 12, из водила 13, установленного на стойке 1 с возможностью вращения, Водило 13 состоит из жестко связанных между собой верхней 14 и нижней 15 щек. Между щеками водила 13 на осях 16 свободно посажены три сателлита 17, входящие в зацепление с солнечным колесом 11 и эпициклическим колесом 12, На стойке 1 свободно посажено с возможностью вращения зубчатое колесо 18, с которым кинематически связана посредством кулачкового соединения нижняя щека 15 водила 13. Кулачковое соединение выполнено из чередующихся выступов 19 и впадин 20,.Плунжеры 21 гидроцилиндров 5 выполнены с зубчатыми рейками 22. Рейки 22 взаимодействуют с зубчатым колесом...
Адаптивный захватный модуль промышленного робота

Номер патента: 1689063
Опубликовано: 07.11.1991
Авторы: Дарда, Дровников, Нуждин
МПК: B25J 15/00
Метки: адаптивный, захватный, модуль, промышленного, робота
...минимальной и максимальной величинами, то привод 2, проворачиваясь относительно оси крепления, воздействует на эапорно-регулирующий элемент дроссел я 4 (умен ьшает его и роводимость), то в свою очередь приводит к увеличению давления в поршневой полости и ривода 2 и, следовательно, к перемещению поршня со штоком вправо и увеличению усилия зажатия объекта манипулирования Поскольку выход делителя давления одновременно соединен с поршневой полостью привода 8, то шток последнего переместится влево, При этом с помощью пары рейка 9 - зубчатое колесо 12 происходит поворот и осевое перемещение винта задатчика 13 давления, в результате чего на его выходе устанавливается давление РП 2, пропорциональное давлению Рп 1, Так как одна из губок...
Модуль промышленного робота

Номер патента: 1715578
Опубликовано: 28.02.1992
Автор: Семеноженков
МПК: B25J 9/00
Метки: модуль, промышленного, робота
...11 35обгонными муфтами 12 и 13 с взаимно противоположным направлением свободного.хода, наружные обоймы которых с помощьюшатунов 14 и 15, 16 и 17 связаны линейно. перемещающимися звеньями 18 и 19, пере- . 40мещающимися в направляющих 20 и 21.иподпружиненными друг к другу с помощьюпружин 22 и 23, Каждая пружина оснащенафиксатором состояния (фиг. 1 и 3), состоящим из скрепленных с концами пружины 45опорных шайб 24 и 25 с пазами 26 и кронш-,.тейнами 27, выполненного в виде установ-.ленного на стойке вала, содержащего упоры .28 и поворачиваемого с помощью шарнирноукрепленного на стойке пневмоцилиндра .5029, функции которого могут выполнять так.же электромагнит, электродвигатель и т.д.Аккумулятор механической энергии включает...