Загрузочное устройство
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(ц 4 В 23 7/00 ОПИСАНИЕ ИЗОБРЕТЕНИК АВТОРСКОМУ СВИДЕТЕЛЬСТВУЬь",Д У Ф 7 Ю СИ ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(7 1) Межотраслевой головной конструкторско-технологический институт технологической оснастки(56) Авторское свидетельство СССРВ 961921, кл. В 23 Я 7/00, 1981. ЯО 1303367 А 1(57) Изобретение относится к загрузочным устройствам обрабатывающихмашин и может бысть применено в станкостроении при создании роботизированных комплексов. Целью изобретенияявляется повышение надежности работыустройства и уменьшение высоты бункера за счет обеспечения выстоя ножевого захвата в верхнем положении безотключения привода и кинематической1303367 связи механизма перемещения ножевого захвата с корпусом бункера. Это достигается тем, что при движении цепного конвейера его ролики взаимодействуют с ведущей кареткой 5 и поднимают ее. При перемещении вверх каретки 5, вследствие кинематической связи ,шестерни 18 с неподвижными рейками 7 и рейками 13, ведомая каретка 4 также пе. ремещается вверх со скоростью в два ра, за больше скорости ведущей каретки 5, Ножевой захват, захватывая детали,1Изобретение относится к загрузочным устройствам обрабатывающих машини может быть применено в станкостроении при создании роботизированныхкомплексов. 5Целью изобретения является повышение надежности работы устройства иуменьшение высоты бункера за счетобеспечения выстоя ножевого захватав верхнем положении без отключенияпривода и кинематической связи механизма перемещения ножевого захватас корпусом бункера.На фиг. 1 изображено загрузочноеустройство, продольный разрез; на15фиг. 2 - вид А на фиг. 1; на фиг.3разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5. - разрезГ-Г на фиг. 2; на фиг. 6 - положениесориентированной детали.Загпузочное,устройство содержитдбункер, выполненный в виде емкости 1,направляющие 2, ножевой захват 3, перемещающийся с помощью механизма перемещения ножевого захвата, состоящего из ведомой каретки 4, ведущей каретки 5, а также привод 6,Направляющие 2 установлены на неподвижных рейках 7, которые крепятсяна емкости 1. Ножевой захват 3, выполненный в виде двух параллельныхпластин 8, рабочие поверхности которых расположены под углом к горизонтальной цлоскости, закреплен на ведомой каретке 4 с проемом 9. Расстоя 35ние между пластинами 8 больше диаметра стержня детали 10 и меньше диаметра ее головки. ориентирует их и подает до уровнялотка-накопителя, где и задерживается вследствие остановки каретки.5 навремя, равное времени прохождения роликами цепного конвейера горизонтального участка 24. Из крайнего верхнегоположения ножевой захват возвращается в исходное поЛожение вместе с ведомой кареткой 4 со скоростью в двараза больше скорости ведущей каретки 5. 6 ил. На ведомой каретке 4 смонтированы катки 11, контактирующие с направляю- щими 2 и скалками 12, на наружной поверхности которых нарезаны рейки 13,На корпусе ведущей каретки 5, который имеет проем 14 и отверстия для перемещения во втулках 15 скалок 12, установлены две параллельные щеки 16 с опорнами плоскостями 17 и две шестерни 18, находящиеся в кинематической связи с рейками 7 и 13. Ступицы шестерен 18 являются катками для перемещения ведущей каретки 5 по направляющим 2.Привод 6, состоящий из электродвигателя и редуктора, с помощью вертикальных стоек 19 смонтирован на кронштейне 20 .с горизонтальными площадками 21 и 22 и звездочками 23 кинематически связан с безреверсивным цепным горизонтально замкнутым цепным конвейером, Размер кронштейна 20 с звез- дочками 23 в плане меньше расстояния между щеками 16 и проемами 9 и 14.Горизонтально замкнутый цепной конвейер имеет горизонтальные 24, вертикальные 25 и наклонные 26 участки, а цепь снабжена консольно установленными роликами 27, взаимодействующими при работе с опорными плоскостями 17.Загрузочное устройство работает следующим образом.В исходном положении привод 6 включен, ведомая 4 и ведущая 5 каретки находятся внизу и неподвижны.При этом каретка 4 покоится на каретке 5, которая одной из опорныхплоскостей 17 щеки 16 опирается на площадку 21 кронштейна 20.В исходном положении ролики 27 цепного конвейера находятся на одном из его наклонных участков 26 и не кон тактируют с опорными плоскостями 17, а верхняя часть кронштейна 20 расположена в проемах 9 и 14 кареток 4 и 5.Когда движущиеся ролики 27 выходят на участок 25 цепного конвейера, они вступают во взаимодействие с опорными поверхностями 17 и придальнейшем движении поднимают до горизонтального участка 24 ведущую каретку 5, катки которой перекатыва 15 ются по направляющим 2.При движении роликов 27 по участку 24 ведущая каретка 5 находится в крайнем верхнем положении и неподвижна.20Продолжая движение, ролики 27, копируя конфигурацию цепного конвейера, перемещаются в исходное положение по противоположному участку 25, что обеспечивает перемещение вниз ведущей каретки 5 до соприкосновения с площадкой 21 кронштейна 20.При перемещении вверх каретки 5 и вследствие кинематической связи шестерен 18 с неподвижными рейками 730 и рейками 13 ведомая каретка 4 также перемещается вверх со скоростью в два раза больше скорости ведущей каретки 5.Находящийся внизу емкости 1 ножевой захват 3, захватывая детали 10, ориентирует их и подает вверх до уровня лотка-накопителя (не показан), При ориентации детали 10, зависая головками на рабочих наклонных поверхностях пластин 8, принимают вертикальное положение, при котором их стержни располагаются между пластинами,В крайнем верхнем положении ножевой захват 3 задерживается вследствие остановки ведущей каретки 5 на время, равное времени прохождения роликами 27 горизонтального участка 24, и детали, находящиеся на нем, последовательно перемещаются по наклонным рабочим поверхностям в лоток-накопитель.Для сохранения неподвижности ножевого захвата 3 в крайнем верхнем положении устраняется возможность прогиба цепного контура на горизонтальном участке 24 путем перекатывания роликов цепи по горизонтальной площадке 22 кронштейна 20. Выпаданию деталей из емкости 1 через зазоры между каретками 4 и кареткой 5 и дном емкости, когда ножевой захват 3 находится в крайнем верхнем положении, препятствуют боковые поверхности пластин 8 и щек 16, которыми перекрываются укаэанные зазоры.Из крайнего верхнего положения ножевой захват 3 возвращается в исходное положение вместе с ведомой кареткой 4 со скоростью, которая в два раза больше скорости ведущей каретки 5.Формула изобретенияЗагрузочное устройство, содержащее бункер, установленный на основании, ножевой захват и механизм перемещения ножевого захвата вдоль направляющих, смонтированных в бункере, о т - л и ч а ю щ е е с я тем, что, с целью повышения надежности работы и уменьшения высоты бункера, механизм перемещения захвата выполнен в виде двух последовательно установленных в направляющих кареток, кинематически связанных между собой, причем одна из них установлена с воэможностью взаимодействия с дополнительно введенным в устройство вертикально-замкнутымцепным конвейером и снабжена дополнительной кинематической связью с корпусом бункера, а на другой жестко закреплен ножевой захват.130336777 Г-ГГ 7Составитель И.Щивьев Редактор А.Гулько Техред И.ПоповичКорректор Л.Пилипенко Заказ 1254/16 Тираж 787 Подписное ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г,ужгород, ул.Проектная, 4
СмотретьЗаявка
3953888, 05.09.1985
МЕЖОТРАСЛЕВОЙ ГОЛОВНОЙ КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ
МОЛЧАНОВ ВЛАДИМИР ВЛАДИМИРОВИЧ, ДАНЬКО НИКОЛАЙ ИВАНОВИЧ, ЕРОШЕНКО СЕРГЕЙ ФЕДОТОВИЧ
МПК / Метки
МПК: B23Q 7/00
Метки: загрузочное
Опубликовано: 15.04.1987
Код ссылки
<a href="https://patents.su/5-1303367-zagruzochnoe-ustrojjstvo.html" target="_blank" rel="follow" title="База патентов СССР">Загрузочное устройство</a>
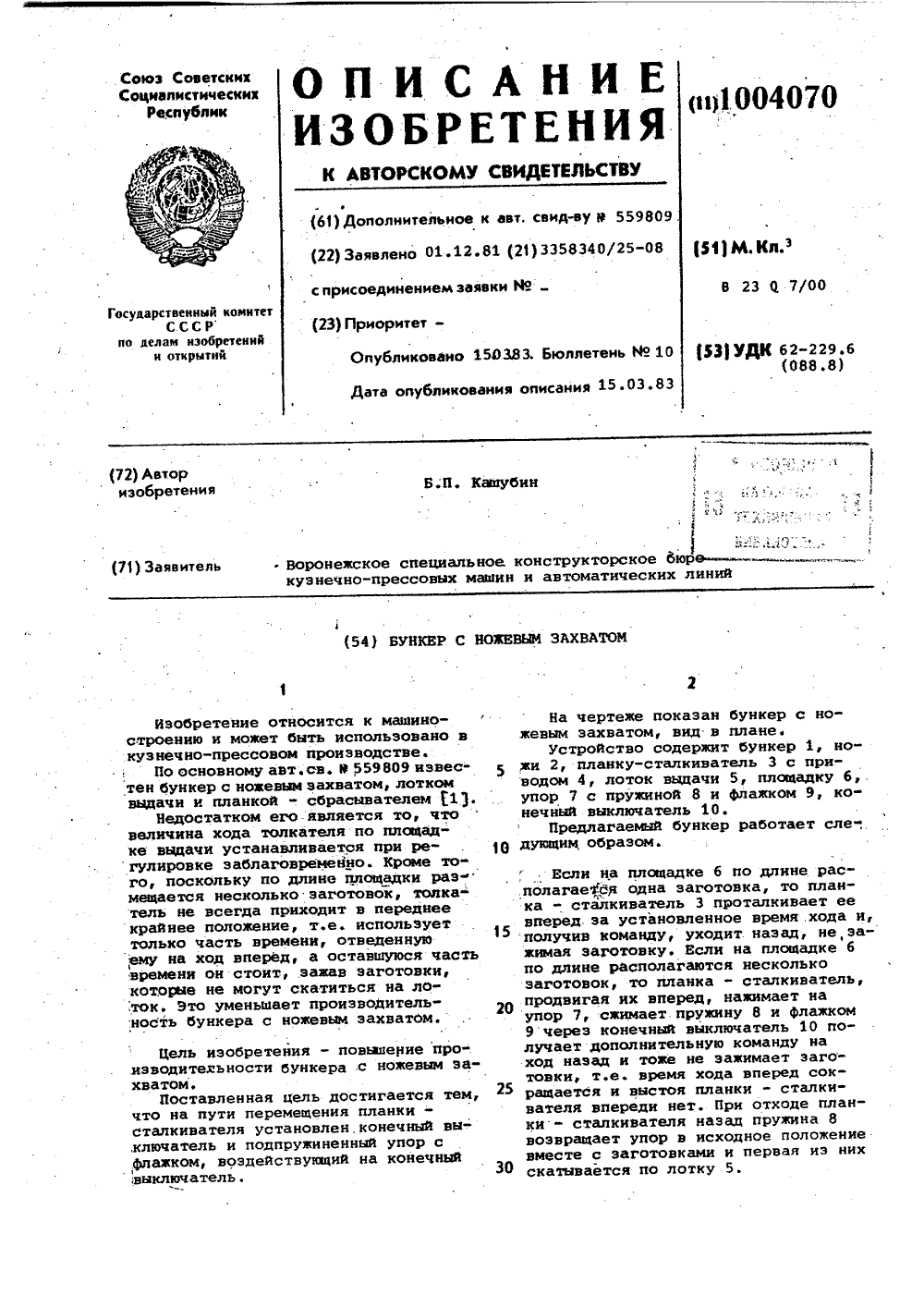
Бункер с ножевым захватом
Номер патента: 1004070
Опубликовано: 15.03.1983
Автор: Кашубин
МПК: B23Q 7/00
Метки: бункер, захватом, ножевым
...бункера .с ножевым захватом,Поставленная цель достигается тем,что на пути перемещения планкисталкивателя установлен, конечный вы,ключатель и подпружиненный упор сфлажком. воздействукщий на конечный;выключатель. На чертеже показан бункер с ножевыи захватом, вид в планеустройство содержит бункер 1, ножи 2, планку-сталкиватель 3 с приводом 4, лоток выдачи 5, площадку б, упор 7 с пружиной .8 и флажком 9, конечный выключатель 10.ПредЛагаемый бункер работает сле-, 10 дующим, образом. Если на площадке 6 по длине рас.полагается одна заготовка, то планка - сталкиватель 3 проталкивает ее вперед за установленное время .хода и, получив команду, уходит назад, не,зажимая заготовку. Если на площадке б по длине располагаются несколько заготовок, то...
Бункер с ножевым захватом

Номер патента: 522942
Опубликовано: 30.07.1976
Автор: Кашубин
МПК: B23Q 7/00
Метки: бункер, захватом, ножевым
...подхода несориентированной заготовкк подающему лотку. 25Бункер состои из чаши 1 с установленнымв ней ворошителем 2 в виде шарнирно-подвижного дна, приводимого в движение цилиндром 3.Захват ножевого типа 4 соединен с цилин дром 5, Упор б выполнен в виде планки, установленной над подающим лотком и смещенной в сторону лотка на расстояние не менее диаметра заготовки. Упор выполнен регулируемым по высоте и диаметру детали.Бункер работает следующим образом.В чашу бункера загружаются навалом мерные заготовки. Захват перемещается в вертикальной плоскости вверх и вниз под действием пневмоцлиндра и при своем движении захватывает несколько заготовок и подает их на лоток 7. При этом смещение упора в сторону от стенки чаши на расстояние не менее...
Бункер с ножевым захватом

Номер патента: 559809
Опубликовано: 30.05.1977
Автор: Кашубин
МПК: B23Q 7/00
Метки: бункер, захватом, ножевым
...иа фиг. 2 - то же, в плане.5 Емкость чаши 1 бункера снабжена полузнами 2, имеющими привод от цилиндров 3.Площадка выдачи 4 с упором 5 имеет подвижную планку-сталкиватель 6, которая может перемещаться под действием цилиндра О 7. Для скатывания заготовок из емкостсибункера установлен лоток 8. Ползуны 2 установлены параллельно ножевому захвату 9 и подвижной планке 6.Заготовки засыпают в емкость 1, где под 5 действием движения ползунов 2 и благодарятому, что расстояние между ними меньше длины заготовки, они ориентируются своей продольной осью параллельно оси планки- сталкивателя 6.20 Ножевой захват 9 поднимает ориентированные таким образом детали, которые скатываются на площадку выдачи. Затем плаккасталкиватель совершает движения вдоль...
Механизм управления высотным положением ножевого рабочего органа

Номер патента: 589342
Опубликовано: 25.01.1978
Авторы: Егоров, Корелин, Кудиш, Кузин, Файнзильбер
МПК: E02F 5/10
Метки: высотным, механизм, ножевого, органа, положением, рабочего
...управления и повышение его точности.Это достигается тем, что поворотные лопасти и гидроцилиндр их поворота смонтированы в каретке, установленной с возможностью перемещения на ножевом рабочем органе и шарнирно связанной с ним при помощи силового цилиндра.На фиг. 1 изображен механизм управления высотным положением ножевого рабочего органа, вид сбоку; на фиг. 2 - разрез по А - А на фиг. 1.Ножевой рабочий орган 1 в своей задней части снабжается направляющими 2, на которых с помощью, например, катков 3 и гидроцилиндра 4 может перемещаться каретка 5.Гидроцилиндр 4 соединен с рабочим органом 1, а его шток - с кареткой 5. На каретке 5 на оси 6 установлены лопасти 7, Поворот оси 6 с лопастями 7 производится гидроцилиндром 8, соединенным с...
Устройство для захвата и перемещения изделий в установленное положение

Номер патента: 1305117
Опубликовано: 23.04.1987
МПК: B65H 9/10
Метки: захвата, перемещения, положение, установленное
...по хо-З 0 ду движения листа в печатный аппарат до планки упора 14, Дпя этого выступы 5, находящиеся на постоянно движущейся ленте 4, проходят в начале че-рез смывочную ванну 9, где снимаются остатки клея от предыдущей операции ориентации листа и от бумажной пыли. Затем выступы получают порцию клея при прохождении клеевой ванны 10. Поскольку шкив 2 находится в эксцент ричных втулках, то во время нахождения выступов 5 на нижней ветви ленты 4 натяжение ленты ослабевает, благодаря подпружиненному толкателю 7 с роликом 8, все время натягивающему 45 нижнюю ветвь ленты 4, выступы с лентой опускаются и касаются листа. При соприкосновении выступов с листом он приклеивается к ним, а поскольку лента 4 начинает натягиваться на шкивах и...
Предыдущий патент: Устройство для загрузки токарных станков
Следующий патент: Загрузочное устройство
Случайный патент: Устройство для учета и контроля времени оптимального периода технического обслуживания изделия