Способ определения параметров функции преобразования измерительного канала информационно-измерительной системы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1185280
Автор: Ракушин
Текст
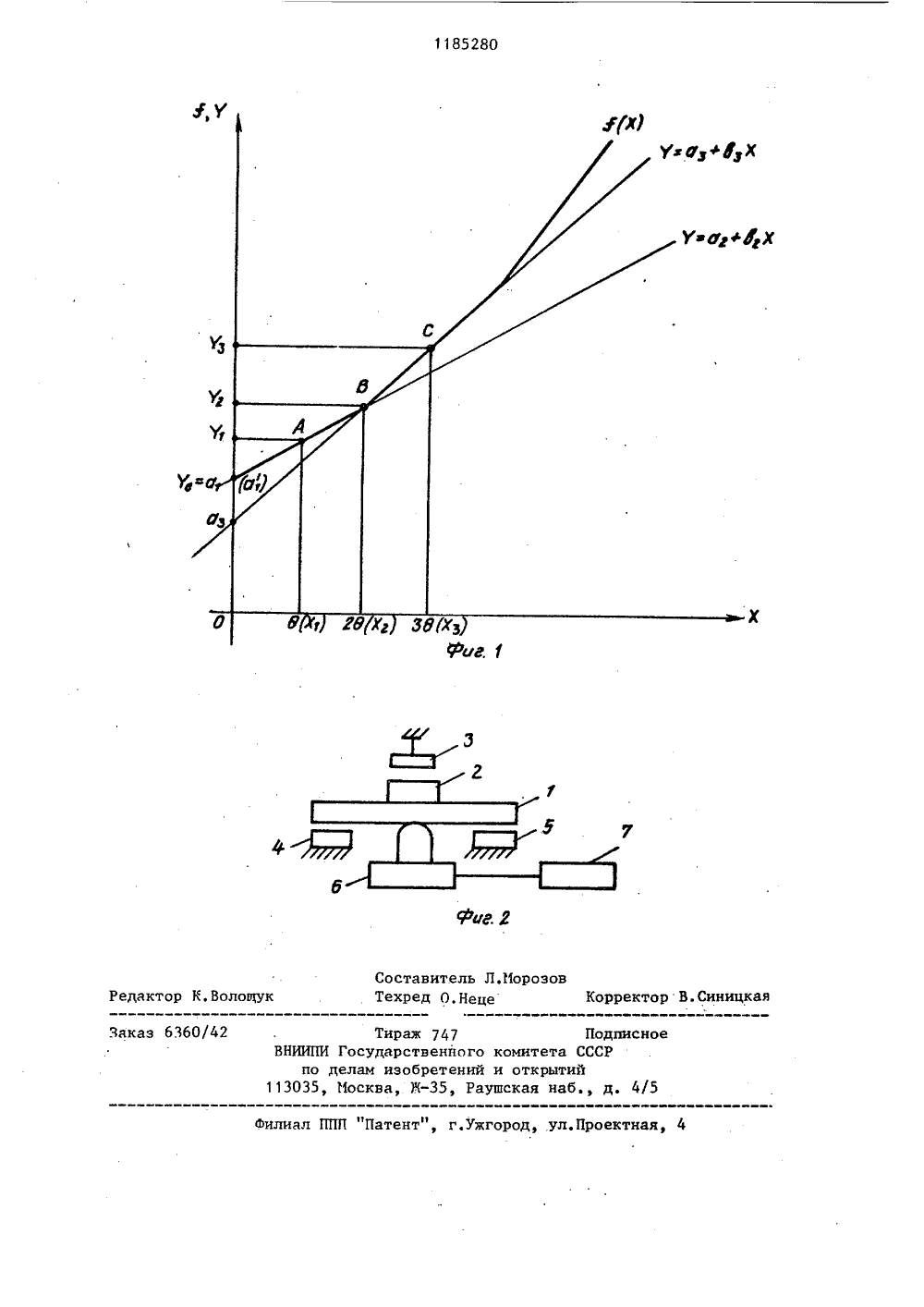
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИН 5 ц 4 С 01 К 35/00 ГОС ГЮ ОПИСАНИЕ ИЗОБРЕТЕК АВТОРСКОМУ( СВИДЕТЕЛЬСТВУ 21( а Р 0 к кАРСТВЕННЫЙ КОМИТЕТ СССР М ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(56) Авторское свидетельство СССР Кф 250485, кл. С 01 С 19/12, 1970,Авторское свидетельство СССР У 331321, кл. С 01 К 19/00, 1970. (54)(57) СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАИЕТРОВ ФУНКЦИИ ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНОГО КАНАЛА ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМБ, основанный на регистрации при нулевом входном сигнале выходного сигнала У измерительного канала, соответствующего параметру а функции преобразования,.характеризующему точку пересечения первой линейной аппроксимирующей: функции с .осью ординат, о т л и ч а ю щ и йс я тем, что, с целью упрощения. и расширения области практического использования, по измерительному каналу пропускают образцовый сигнал с фиксированной величиной 9, регистрируют на еговыходе значение 1 и определяют наклон Ь функции преобразования на первом линеаризованном,801185280 участке как Ь,-" .- (9 , пропускают по измерительному каналу необразцовый сигнал, изменяют его величину до получения на выходе значения, равного у добавляют к выставленному необразцовому сигналу образцовый сигнал О, регистрируют на выходе значение 1, соответствующее их сумме, определяют наклон Ь 2 функции преобразования на втором линеаризованном участке как Ь=У У/д , анало гично для какдого Зс-го линеаризованного участка определяют наклон о, функции преобразования как Ь-У,Я 6, где 1 , и Чк - регистрируемые значе-ния, соответствующие точкам пересечения Ь)-й и К-й, К-й и (К+1)-йлинейных аппроксимирующИх функций, Саф и при равенстве Ьк = Ь принимают параметр ц, характеризующий точку а пересечения К-й линейной аппроксимирующей функции с осью ординат, равным а, 1, а в случае неравенства Ъ Ф Ъ, параметр. е определяют из ЯО соотношения Сд Ю 00Отключают образцовый входной сигнал 9 и проводят изменение величины необразцового входного сигнала х до момента получения на выходеа . Ф измерительного канала результата 2.(8) В момент получения результата измерениявновь подключают образ 2цовый сигнал д и проводят измерение суммы образцового сигнала 6 и необразцового. х 2,иУ=4 +Ь (Х +8)Ф где и , Ь - параметры линейнойфункции, соответствующие участку Ч 2, Уз диапазона измерений (участкуВС на фиг.1).Определяют разность двух последних результатов измерений: (,- Х,= Ы,.1, (Х,+В) -4,-Ь, Х,=Ь, Е ЙО) 10 15 2= с 1,+ Х,Решение этой системы относительно неизвестного параметра м находится в виде: 50 У 2-а 222а,=(2 Ь Р 2 ф 2)32 55 Результат измерения (2, соответствующий точке пересечения двух Тогда наклон Ъ 5 очередного лине аризованного участка ВС равен 133 25Проводят сравнение Ь 2 и 6 . В графическом Примере наклон линеаризован-З 0 ного участка ВС изменился, т.е. Ь 2 Ф Ь 5, Значение Ь 5 известно из соотношения (11). Остается определить неизвестный параметр 45 линейной функции, аппроксимирующей участок ВС функции преобразования измерительного канала. Для этого достаточно сторого можно предположить, что результат измерения(точка В функции преобразования) 40 соответствует точке пересечения двух линейных функций, Поэтому для точки В можно записать систему двух уррвнений Ч 2= С 12+ Ь 2 Х 245 линеаризованных участков, и параметры ш, 5 линеаризованного участка ВС запоминают.Дальнейшая последовательностьопераций по определению параметров функции преобразования измерительно" го канала во всем диапазоне измерений и соответствующие им аналитические выкладки аналогичны ранеерассмотренным.Устройство для реализации предложенного способа представлено в виде тензометрических весов. Оно содержит грузоподъемную платформу 1 (фиг,2), образцовый груз 2 с величиной 6 ,электромагниты 3-5, тензометрический ,преобразователь 6 и блок 7 обработки результатов измерения. Процесс определения параметров функции преобразования тензометрических весов проводится в соответствии с ранее указанной последовательностью операций, при этом отключение и подключение образцового груза 2 к грузопадъемной платформе 1 осуществляется с помощью электромагнита 3, а "нагрузка" платформы 1 выполняется электромагнитами 4 и 5,Лля определения параметров функциипреобразования тензометрических весов вначале проводят измерение принулевом входном воздействии. Приэтом электромагниты 4 и 5 отключены,электромагнит 3 включен, образцовыйгруз 2 не оказывает воздействия нагрузоподъемную платформу 1. В результате измерения получают значениеУ и запоминают его.Отключением электромагнита 3нагружают грузоподъемную платформу 1образцовым грузом 2, Проводят второеизмерение и получают результат:У 4,+ 0.Определяют наклон первого линеаризованного участкаУ 4.9Включением электромагнита 3 снимают образцовую нагрузку с тензометрических весов. Включают электромагниты 4 и 5. При этом грузоподъемнаяплатформа 1 оказывается под воздействием некоторой нагрузки х , величину которой изменяют до момента получе.ния на выходе результата измерения,равного .Изменение величины нагрузки осуществляют путем изменения величинытоков, протекающих в обмотках электромагнитов 4 и 5. В момент получениярезультата измерения, равного Ч, отключают электромагнит 3 и, тем самым, дополнительно нагружают платформу 1 образцовым грузом 2, Проводят измерение суммарного воздействияна платформу 1 нагрузкой М, соответствующей результату измерения у, и1образцовым грузом 2:22=д 2+О 2 Х+ Й)Определяют разность двух последовательных результатов измерений:г-У =1,815Делят полученную разность на значение 9 образцового груза 2 и сравнивают величины наклона 1 и 6 соседних участков Функции преобразова-,ния. Возможно сравнение разности 20УВ случае, если Ь 4 Ь, определяется параметр с 1,2 линейной функции,аппроксимирующей второй участок функции преобразования тензометрическихвесов.Затем вновь включают электромагнит3, снимая образцовую нагрузку 9, иувеличивают ток в электромагнитах 4 и5, пока на выходе не окажется резуль- ЗОтат измерения, равный (. При достижении выходным сигналом системы значения 2 отключают электромагнит 3 ипроводят измерение суммарной величинынагрузки, обеспеченной электромагнитами 4 и 5 и образцовым грузом 2. Указанные операции позволяют получить измерительную информацию, необходимуюдля определения наклона следующегоучастка функции преобразования и параметров линейной функции., аппроксимирующей этот участок.Сохраняя порядок и последовательность подключения,и отключения к грузоподъемной платформе образцового груза 2, а также порядок изменения необразцовой нагрузкиза счет увеличениятоков в электромагнитах 4 и 5, проводят кусочно-линейную аппроксимациюпоследующих участков функции преобразования тензометрических весов вовсем диапазоне измерений и запоминаютрезультаты измерений, соответствующиеточкам пересечения линеаризованныхучастков и соответствующие им параметры линейной функции,Реализация предлагаемого способасущественно упрощает автоматизациюметрологического обслуживания тензометрических весов. Операции включения(отключения) электромагнитов 4 и 5 иизменения величин токов в них могут бытьреализованы на практике на основепростых технических решений, При этомфункционалы управления всеми автоматическими операциями имеют простойвид и связаны с обработкой выходнойинформации, Расширение области практического применения способа определяется также возможностью проведения всехопераций в реальных условиях эксплуатации на месте установки тензометрических весов,1185280 Лоро актор К,Воло ректор В.Синиц каз 6360/4 филиал ППП "Патент", г.ужгород, ул.Проектная,СоставительТехред О.нец Тираж 747 ИИПИ Государственног по делам изобретении 035, Иосква, И, Р комии ошск Подпита СССРытийнаб., д.
СмотретьЗаявка
3638820, 18.08.1983
ВОЙСКОВАЯ ЧАСТЬ 11284
РАКУШИН АЛЕКСАНДР СТЕПАНОВИЧ
МПК / Метки
МПК: G01R 35/00
Метки: измерительного, информационно-измерительной, канала, параметров, преобразования, системы, функции
Опубликовано: 15.10.1985
Код ссылки
<a href="https://patents.su/5-1185280-sposob-opredeleniya-parametrov-funkcii-preobrazovaniya-izmeritelnogo-kanala-informacionno-izmeritelnojj-sistemy.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров функции преобразования измерительного канала информационно-измерительной системы</a>
Способ коррекции функции преобразования измерительного преобразователя для интегрирующей системы
Номер патента: 1531112
Опубликовано: 23.12.1989
Автор: Куликов
МПК: G06G 7/186
Метки: измерительного, интегрирующей, коррекции, преобразования, преобразователя, системы, функции
...функции преобразования погрешности.Сущность предлагаемого способа состоит в следующем. Предварительно при нулевом корректирующем сигнале (2 = 0) на измерительный вход измерительного преобра зователя 1 подают подлежащий в дальнейшем интегрированию изменяюцийся во времени приближенный входной сигнал Х(с) и на его выходе с помощью статистического анализатора фиксиру ют на временном интервале от нуля до Тзначения начальных моментов И 31-го порядка 11 х; , необходимые для установления численного значения запоминаемого выходного сигнала У при осуществлении последуюо ьсзщей операции по коррекции функции преобразования измерительного преобразователя 1,Ратем при нулевом входном сигнале (Х = 0) непрерывно увеличивают корректирующий...
Аналого-цифровой преобразователь с автоматической коррекцией функции преобразования

Номер патента: 1667246
Опубликовано: 30.07.1991
Авторы: Быков, Диденко, Капустин
МПК: H03M 1/10
Метки: автоматической, аналого-цифровой, коррекцией, преобразования, функции
...согласования характеристики образцового ЦАП 5 и второго АЦП 9. Последнее происходит вследствие того, что при изменении выходного напряжения регулируемого источника 8 образцового напряжения пропорционально меняется выходное напряжение преобразователя 10 с управляемым коэффициентом передачи, а следовательно, и наклон характеристики второго АЦП 9,Регулируемый источник 8 образцового напряжения может быть реализован на основе обычного источника образцового сигнала, состоящего иэ параметрического стабилизатора и операционного усилителя, и с использованием умножающего ЦАП.После изложенной коррекции функции преобразования АЦП готов к преобразованию измеряемого напряжения О которое происходит следующим образом, По команде от блока 7...
Параллельно-последовательный п-разрядный аналого-цифровой преобразователь с автоматической коррекцией функции преобразования

Номер патента: 1732471
Опубликовано: 07.05.1992
Авторы: Алехин, Григораш, Зверев, Корень, Трахтенберг, Штейнберг
Метки: автоматической, аналого-цифровой, коррекцией, п-разрядный, параллельно-последовательный, преобразования, функции
...с инверсного выхода запретит прохождение сигналов записи в счетчик 13 и запоминающее устройство 12, заблокировав элемент 34. Нулевой сигнал с прямого выхода триггера 43 через элемент 37 переведет устройство в первый такт преобразования, переключив через коммутатор 10 вход АЦП 1 с выхода усилителя 5 на выход коммутатора 9, разрешит запись в регистрпереводит триггер 43 в единичное состоя 10 ние, что соответствует переходу устройства 15 20 35 Сигнал "Готовность" АЦП 1, задержанный элементом 41, поступает на вход "Запуск" АЦП 1. На выходе АЦП 1 формируется 40 55 25 30 45 50 2 и заблокирует прохождение сигнала Готовность" АЦП через элемент 33 на выход"Конец преобразования".На выходе М-разрядного АЦП 1 формируется щ старших разрядов...
Устройство преобразования силы веса во временной интервал

Номер патента: 1016691
Опубликовано: 07.05.1983
Авторы: Беда, Бухалов, Власенко, Кучеренко, Рощин, Русин, Самарцев, Семенов, Сергеев
МПК: G01G 23/36
Метки: веса, временной, интервал, преобразования, силы
...во временной интервал.Устройство преобразования силы веса во временной интервал содержит грузоприемную платформу 1, образцовый груз .2, распределитель 3 нагруэ ки, нуль-орган 4, гидравлический датчик 5, заполненный жидкостью.Гидравлический датчик 5 представляет собой замкнутую емкость. внут ренняя полость которой разделена на 65:Ко где Г площадь сечения отверстия7;плотность жидкостиэффективная площадь торцовой стенки 8;коэффициент пропорциональности;сила тяжести взвешиваемогогруза. Рх две части стенкой б с отверстием 7 и заполнена жидкостью, а торцовые стенки 8 и 9 присоединены к ее корпусу посредством гофрированных трубок 10 и 11 сильфонов). Грузоприемная платформаи образцовый груз 2 связаны с распределителем 3 нагрузки. Нуль-орган 4...
Устройство для преобразования напряжения неравновесия тензометрического импульсного моста

Номер патента: 1140051
Опубликовано: 15.02.1985
Авторы: Иванов, Передельский
МПК: G01R 17/10
Метки: импульсного, моста, неравновесия, преобразования, тензометрического
...схема устройства для преобразования напряжения неравновесия тензометрического импульсного моста, реализующего предлагаемый способ, на фиг.2 диаграммы, поясняющие работу устройства.Устройство для преобразования напряжения неравновесия тензометрического импульсного моста для примера ограничено тремя каскадами усиления. Оно содержит трехкаскадный усилитель, между каскадами 1-3 которого включены два синхронных детектора 4 и 5, вход каждого из которых подключен к выходу предыдущего. каскада 1 и 2, два конденсатора 6 и 7, каждый из которых включен между выходом своего синхронного детектора 4 и 5 и общей шиной, блок управления 8 (синхронными детекторами и ключами) к соответствующим выходам которого подключены управляющие входы всех...