Способ коррекции функции преобразования измерительного преобразователя для интегрирующей системы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1531112
Автор: Куликов
Текст
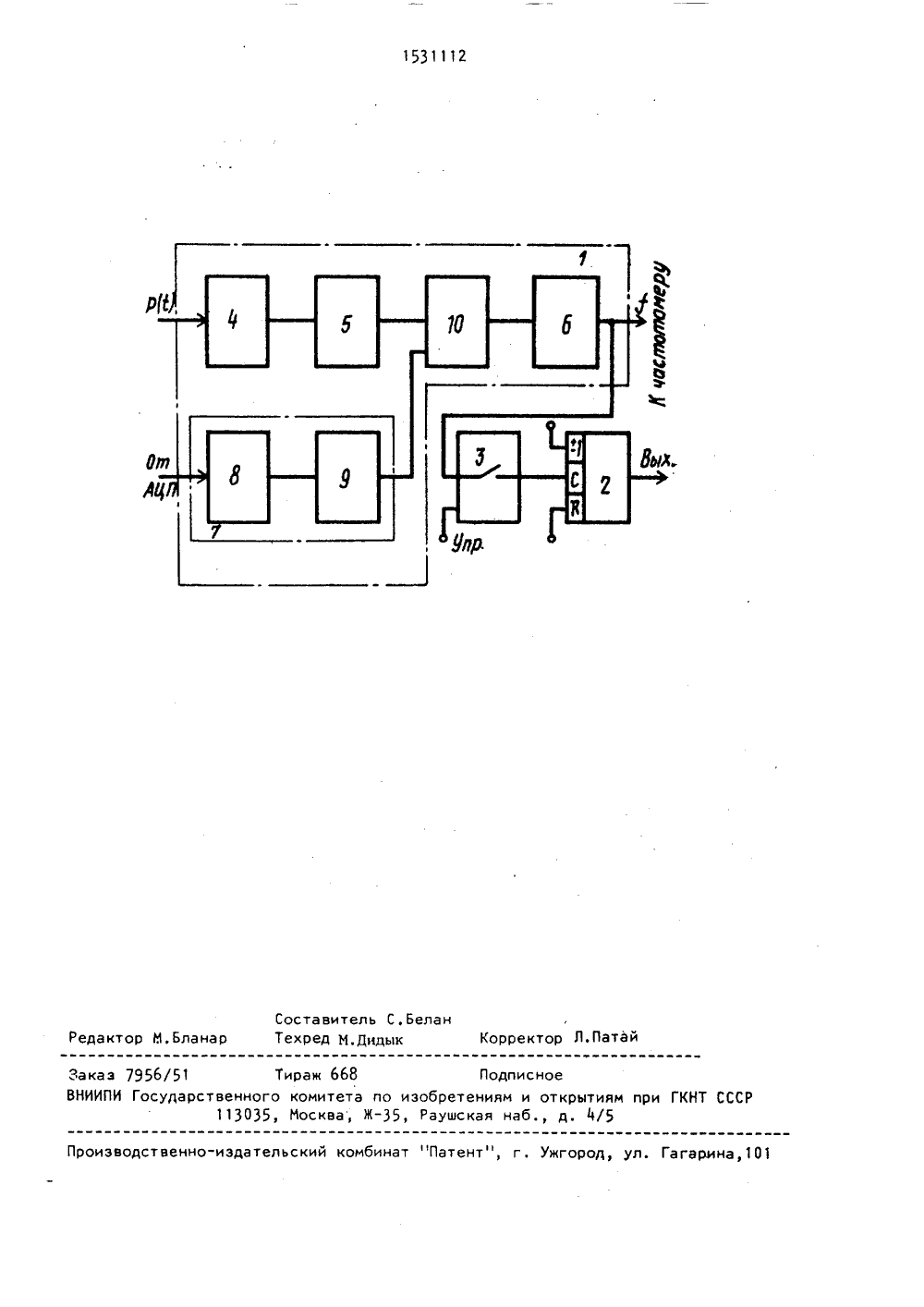
(19 7/18 4 ГОСУДАРСТВЕННЫЙ КПО ИЗОБРЕТЕНИЯМ И ОПРИ ГКНТ СССР ИТЕТРЫТИЯМ ПИСАНИЕ ИЗОБРЕТЕНИЯ счет искл ия влия аддитивных,нелинейностидящей в ИС,ания измеримул ьтип ФП погр на резу тельног ативных и от остей ИС, вх тат интегриро сигнала. 1 ил Це ью изоб точност етения является пов ение относится к автомати мационно-измерительной те Изобр ние ин о уст.рекпредставлена схе эуюцего способ к чертеж а, реа т быть использовано в вычислительных систем и м ойс ерительн которых ци Устройствопреобразовате измерительныи сигнал иня в течение заданного инолержит измерит 1, на измерите одают входной с ыи тегрирует тервала в ме на оторого А ВТОРСКОМУ СВИДЕТЕЛЬСТ(56) Авторское свидетельство СССР й 839042, кл. Н 03 К 5/22, 1980.Авторское свидетельство СССР1383474, кл. Н 03 К 7/06, Н 03 М 1/00, 1988.(54) СПОСОБ КОРРЕКЦИИ ФУНКЦИИ ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ЛЛЯ ИНТЕГРИРУНТЕР С 1 СТЕМЫ (57) Изобретение относится к автоматике и информационно-измерительной технике и может быть использовано в измерительно-вычислительных системах, в которых измерительный сигнал интегрируется в течение заданного интервала времени. 1 ель изобретения - повышение точности. Способ основан на использовании аддитивного корректора, входной сигнал которого устанавливают в зависимости от значения выходного сигнала измерительной системы при нулевом сигнале на ее входе. 0 способ дополнительно введены две группы операций; по пред" варительной регистрации изменяющегося во времени измерительного сигнала, сопровождающейся определениемначальных моментов этого сигнала, ипо градуировке измерительной системы, сопровождающейся полиномиальнойаппроксимацией реальной ФП ИС с определением коэффициентов полинома.Третья группа операций качественно(и количественно) отличается от известной (в прототипе) и заключаетсяв установлении (с помощью аддитивного корректора) на выходе ИС при нулевом сигнале на ее входе не нулевого, как обычно, сигнала, а сигнала,значение которого определяется черезсоотношение между параметрами, характеризующими две первые группы операций: начальными моментами измерительного сигнала и коэффициентами градуировочной характеристики ИС (реальной ФГ), Совокупность отмеченных существенных отличительных признаковпозволила повысить точность результата интегрирования интегрирующей измерительно-вычислительной системы заХ, на корректирующий вход - коррек-тирующий сигнал 2, а с выхода снимают выходной сигнал У, Измерительный преобразователь 1 подключен к инте 5 гратору 2 с помощью ключа 3. В качестве входного сигнала на измерительном входе измерительного преобразователя в общем случае могут быть любые физические величины, например давление газов, и Форма представления сигналов измерительного преобразователя может быть Разной (аналоговый, импульсный).Как правило, измерительный преобразователь 1 содержит последовательно соединенные датчик 4, усилитель 5 и преобразователь 6 формы сигнала например частотно-импульсный измерительный преобразователь. При этом корректируюций сигнал, заполненный на аддитивном корректоре 7, состоящем иэ регистра 8 и цифроаналогового преобразователя 9, может быть подан в различные точки последовательно со единенных элементов с учетом физической природы сигнала.В измерительном преобразователе 1 осуществляется суммирование составляющих от входного и корректирующего сигналов на сумматоре 10.С помощью интегратора 2, например, как в конкретной интегрирующей системе - двоичного счетчика, осуществляют интегрирование суммарного выходного сигнала измерительного преоб-раэователя 1, имеющего аддитивные, мультипликативные и от нелинейности функции преобразования погрешности.Сущность предлагаемого способа состоит в следующем. Предварительно при нулевом корректирующем сигнале (2 = 0) на измерительный вход измерительного преобра зователя 1 подают подлежащий в дальнейшем интегрированию изменяюцийся во времени приближенный входной сигнал Х(с) и на его выходе с помощью статистического анализатора фиксиру ют на временном интервале от нуля до Тзначения начальных моментов И 31-го порядка 11 х; , необходимые для установления численного значения запоминаемого выходного сигнала У при осуществлении последуюо ьсзщей операции по коррекции функции преобразования измерительного преобразователя 1,Ратем при нулевом входном сигнале (Х = 0) непрерывно увеличивают корректирующий сигнал от нулевого значения до тех пор, пока значение выходного сигнала не станет равнымО ъап "051 3Отзм 1 где коэффициенты чувствительности1 мультипликативных составляющих погрешности измерительного преобразователя 1, включая составляюцие от нелинейности его функции преобразования, берутся из паспорта на данный экземпляр измерительного преобразователя, а номинальную чувствительность 5 соответствуюцую номинальной функции преобразования УБ хн нпринимают одинаковой для всех измерительных преобразователей данного типа. После этого путем фиксации корректирующего сигнала, соответствующего этому значению, запоминают постоянный выходной сигнал У оч вводят его в момент начала интегрирования, суммируют с составляющей выходного сигнала, соответствующей изменяющемуся во времени входному сигналу Х (с), и интегрируют с помощью интегратора 2, подключаемого ключом 3, полученный суммарный сигнал,Таким образом, в предлагаемом устройстве реализуется предлагаемый способ коррекции функции преобразования.Благодаря коррекции функции преобразования измерительного преобразователя результат интегрирования становится независимым от его аддитивных, мультипликативных и от нелинейности функции преобразования погрешностей и равным результату интегрирования при использовании идеального измерительного преобразователя с номинальной линейной функцией преобразования У = Бх т.е. способ коррекции позволяет резко повысить точность во столько раз, во сколько раз предварительно зафиксированные начальные моменты И хбрльот иЪМ ше их отклонений М 1;х;от начальных моментов реального изменяющегося во времени входного сигнала Х(1.) при интегрированииФормула изобретенияСпособ коррекции функции преобразования измерительного преобразователя для интегрируюцей системы, осно5 153 1112ванный на введении корректирующегои запоминании выходного сигналов принулевом значении входного сигнала,о т л и ч а ю щ и й с я тем, что,с целью повышения точности, предварительно при нулевом корректирующемсигнале определяют и Фиксируют назаданных временных интервалах значения начальных моментов подлежащегоинтегрированию входного сигнала, затем при нулевом входном сигнале непрерывно увеличивают корректирующийсигнал от нулевого значения до техпор, пока значение выходного сигналане станет равнымо дБц 4 - .о кзму1:1где У - значение запоминаемого 20ъювыходного сигнала при нулевом входном сигнале измерительного преобразователяЯ- номинальная чувствительность, соответствующаяноминальной Функции преобразования У Бх измерительного преобразователя данного типа,коэффициент чувствитель 51ности мультипликативныхсоставляющих погрешности,включая составляющие отнелинейности реальнойФункции преобразованияизмерительного преобразователя (паспортные величины),1 - Фиксируемый на выходе ф имизмерительного преобразователя начальный момент1-го порядка ( 1+в),подлежащего интегрированию изменяющегося во времени входного сигналах(С) на временном интервале от 0 до ТИ 1 м, фв - наивысшая степейь полинома, характеризующегофункцию преобразованияизмерительного преобразователя, - номер временного интервала Т ;, соответствующего промежутку времени от 0 до момента, при котором определяется ре- .зультат интегрирования, запоминают его и при интегрировании суммируют запомненное значение с выходным сигналом измерительного преобразователя.1531 112 Составитель С.Белананар Техред М.дидык Корректор Л.Патай дант роизводственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарин аказ 7956/51 Тираж 668 Подписное НИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С 113035, Москва ЖРаушская наб д. 4/5
СмотретьЗаявка
4255420, 17.04.1987
ПРЕДПРИЯТИЕ ПЯ А-1923
КУЛИКОВ СЕРГЕЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G06G 7/186
Метки: измерительного, интегрирующей, коррекции, преобразования, преобразователя, системы, функции
Опубликовано: 23.12.1989
Код ссылки
<a href="https://patents.su/4-1531112-sposob-korrekcii-funkcii-preobrazovaniya-izmeritelnogo-preobrazovatelya-dlya-integriruyushhejj-sistemy.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции функции преобразования измерительного преобразователя для интегрирующей системы</a>
Способ восстановления переменного входного сигнала измерительного преобразователя

Номер патента: 468169
Опубликовано: 25.04.1975
Автор: Грановский
МПК: G01R 19/00
Метки: восстановления, входного, измерительного, переменного, преобразователя, сигнала
...на испытательный сигнал.Однако необходимое для реализации из-. вестного способа скачкообразное входное воздействие в ряде областей измерений не может быть осуществлено с требуемой точностью, а в некоторых областях, например при измерении ударных ускорений,и не может быть осуществлено вообще.Цель изобретения - расширение функ, циональных возможностей и повышение точности восстановления.Для этого переменный испытательный 2 ц сигнал регистрируют одновременно с откликом и по соотношению между значениямистрированных переменного испытатесигнала, отклика и известного высигнала измерительного преобразо еременного входного сигналаого преобразователя.На чертеже показано устройЭизуюшее способ восстановлениого входного сигнала измерите...
Устройство для определения шагов считывания сигнала по времени в стробоскопических измерительных преобразователях

Номер патента: 905879
Опубликовано: 15.02.1982
Авторы: Алексеев, Бондаревский, Гельман, Панков, Тихомиров
МПК: G01R 29/02
Метки: времени, измерительных, преобразователях, сигнала, стробоскопических, считывания, шагов
...из блока б управления и обработки. В искодном состоянии устройства переклюатель 9 обеспечивает передачу сиг налов конца преобразования АЦП 4 непосредственно на вход генератора 8. По мере формирования стробимпульсов запускается АЦП 4, код текущего дискретного значения передается в блок б для анализа, по сигналу конца преобразования АЦП 4 формируется очередная ступень напряжения генератора 8 и соответствующий стробимпульс, по которому после деблокировки ключевого элемента 5 повторяется цикл считывания очередного дискретного значения измеряемого синусоидального напряжения. По мере считывания синусоидального напряжения дискретные значения приближаются к максимальному уровню на аналоговом выходе преобразователя 3. С получением первого...
Устройство для измерения времени установления выходного сигнала цифроаналогового преобразователя

Номер патента: 790298
Опубликовано: 23.12.1980
МПК: H03K 13/32
Метки: времени, выходного, преобразователя, сигнала, установления, цифроаналогового
...выходам которого этот код поступает на вход блока 17 сравнения.Сигналы на выходе компараторов 5 и 11 имеют низкий уровень. Эти сигналы, объединенные элементом ИЛИ 24, инвертируются. Сигнал с выхода элемента ИЛИ 24 проходит через элемент 20 задержки и открывает элемент И 23, через который начинают проходить импульсы генератора 7 на счетный вход счетчика 13. При превыаениисигналом верхнего уровня или его снижения ниже нижнего уровня закрывается элемент И 23, и импульсы с выхода генератора 7 не проходят на вход счетчика 13, а счетчик 6 продолжает подсчет импульсов, так как триггер 8 продолжает оставаться в единичном состоянии. В процессе работы счетчика 6 может произойти его переполне"ние, тогда на его выходе переполненияформируется...
Способ ускоренных испытаний на надежность струнных измерительных преобразователей

Номер патента: 1089526
Опубликовано: 30.04.1984
Авторы: Васылькив, Гогоберидзе, Петрашень, Радкевич, Хейфиц
МПК: G01R 31/30
Метки: измерительных, испытаний, надежность, преобразователей, струнных, ускоренных
...влияющей величины, измеряют его выходной сигнал, а в промежутках между этими моментами времени преобразователь нагружают предельными значениями входной и влияющей величин и определяют его наработку на отказ Т) по формулеТ = с Ян 1-3 д/А 1 ю Югмгде ь - постоянная времени 1п - значение допустимой погрешности преобразователя,А - эначение измеряемой величины (например, дрейфа выходного сигналф.а заданные три момента временигудовлетворяют условию3- -г= г. Ь 4 Тсмlо 2) гдето - погрешность средств испытаснния;Т - срок службы преобразователя.При неизвестности срока службыв качестве значения Т может быть взято время прогноза выходного параметра преобразователя.Апроксимирукщую функцию при этомпринимают в видеЬ П(И =А (1-ехр(- -) ),10 где...
Устройство для интерполяции сигналов измерительных преобразователей

Номер патента: 752139
Опубликовано: 30.07.1980
Авторы: Каружа, Кулис, Минцерис, Мураускас
МПК: G01B 7/30
Метки: измерительных, интерполяции, преобразователей, сигналов
...напряжение с преобразователя 23, пропорциональное амплитуде сигнала измерительного преобразователя 1 перемещений. Изменение амплитуды сигнала измерительного преобразователя 1 перемещений вызывает пропорциональное изменение постоянного напряжения на выходе преобразователя 23 ц в свою очередь модулирует по амплитуде меандр на выходе амплитудно-импульсного модулятора 16. Меандр интегрируется в интеграторе 15, на выходе которого получается треугольное напряжение 5 О 15 20 25 зо 35 4 О 45 50 55 6 О 65 высокой частоты (фиг. 4 в). Амплитуда этого треугольного напряжения подбирается равной амплитуде треугольного напряжения, образуемого из сигналов измерительного преобразователя 1 перемещений на выходе сумматора 4.При изменениях амплитуды...
Предыдущий патент: Решающий усилитель
Следующий патент: Интегратор последовательностей одиночных знакочередующихся сигналов
Случайный патент: Способ изготовления труб