Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
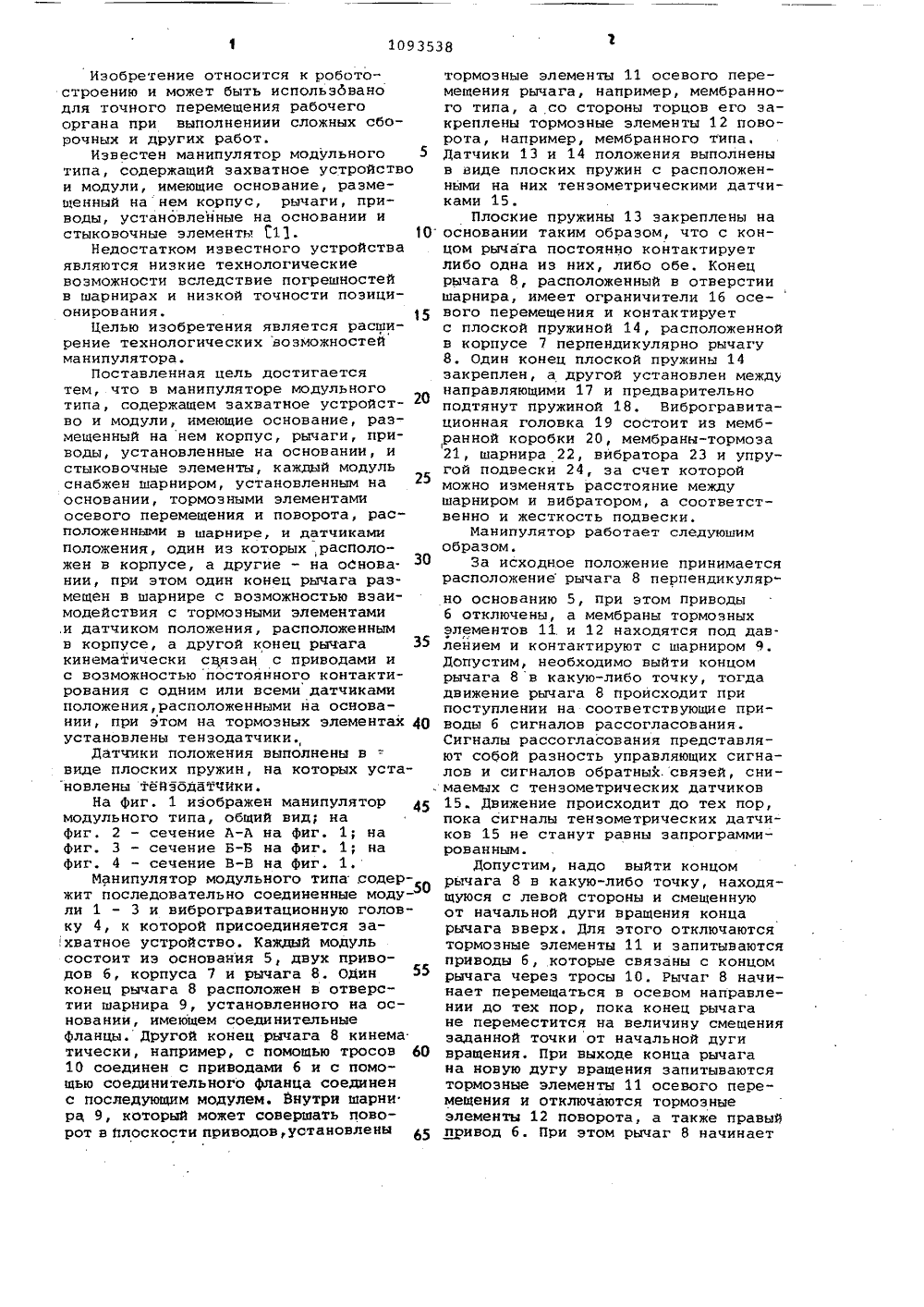
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 5 г 11 00 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(71) Севастопольский приборостроительный институт(54)(57) 1МАНИПУЛЯТОР МОДУЛЬНОГОТИПА, содержащий захватное устройатвои модули, имеющие основание, размещенный на нем корпус, рычаги, приводы, установленные на основании, истыковочные элементы, о т л и ч а ющ и й с я тем, что, с целью расширения технологических воэможностей,каждый модуль снабжен шарниром, уста,ЯО 5 8 А новленным на основании тормозными элементами осевого перемещения и поворота, расположенными в шарнире, и датчиками положения, один из которых расположен в корпусе, а другие на основании, при этом один конец рычага размещен в шарнире с возможностью взаимодействия с тормозными элементами и датчиком положения, .расположенным в корпусе, а другой конец рычага кинематически связан с приводами и с возможностью постоянного контактирования с одним или всемн датчиками положения, расположенными на основании.2. Манипулятор по п. 1, о т л ич а ю щ и й с я тем, что датчики Е положения выполнены в виде плоских пружин, на которых установлены тензометрйческие датчики.Изобретение относится к роботостроению и может быть использовано для точного перемещения рабочего органа при выполнениии сложных сборочных и других работ.Известен манипулятор модульного 5 типа, содержащий захватное устройство и модули, имеющие основание, размещенный на нем корпус, рычаги, приводы, установленные на основании и стыковочные злементь. 11. 10Недостатком известного устройства являются низкие технологические возможности вследствие погрешностей в шарнирах и низкой точности позиционирования. 15Целью изобретения является расширение технологических возможностей манипулятора.Поставленная цель достигается тем, что в манипуляторе модульного типа, содержащем захватное устройство и модули, имеющие основание, размещенный на нем корпус, рычаги, приводы, установленные на основании, и стыковочные элементы, каждый модуль снабжен шарниром, установленным на основании, тормозными элементами осевого перемещения и поворота, расположенными в шарнире, и датчиками положения, один из которых,расположен в корпусе, а другие - на основании, при этом один конец рычага размещен в шарнире с возможностью взаимодействия с тормозными элементами .и датчиком положения, расположенным в корпусе, а другой конец рычага 35 кинематически связан с приводами и с возможностью постоянного контактирования с одним или всеми датчиками положения, расположенными на основании, при этом на тормозных элементах 40 установлены тензодатчики.Датчики положения выполнены в виде плоских пружин, на которых установлены тейзбдатчики.На фиг. 1 изображен манипулятор модульного типа, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1.Манипулятор модульного типа содержит последовательно соединенные модули 1 - 3 и виброгравитационную головку 4, к которой присоединяется захватное устройство. Каждый модуль состоит из основания 5, двух приводов б, корпуса 7 и рычага 8. Один 55 конец рычага 8 расположен в отверстии шарнира 9, установленного на основании, имеющем соединительные фланцы. Другой конец рычага 8 кинема тически, например, с помощью тросов 60 10 соединен с приводами б и с помощью соединительного фланца соединен с последующим модулем. Внутри шарни рц 9, который может совершать поворот в плоскости приводов, установлены тормозные элементы 11 осевого перемещения рычага, например, мембранного типа, а со стороны торцов его закреплены тормозные элементы 12 поворота, например, мембранного типаДатчики 13 и 14 положения выполненыв виде плоских пружин с расположенными на них тензометрическими датчиками 15,Плоские пружины 13 закреплены наосновании таким образом, что с концом рычага постоянно контактируетЛИбо одна из них, либо обе. Конецрычага 8, расположенный в отверстиишарнира, имеет ограничители 16 осевого перемещения и контактируетс плоской пружиной 14, расположеннойв корпусе 7 перпендикулярно рычагу8. Один конец плоской пружины 14закреплен, а другой установлен междунаправляющими 17 и предварительноподтянут пружиной 18. Виброгравитационная головка 19 состоит из мембранной коробки 20, мембраны-тормоза21, шарнира 22, вибратора 23 и упругой подвески 24, за счет которойможно изменять расстояние междушарниром и вибратором, а соответственно и жесткость подвески.Манипулятор работает следующимобразом.За исходное положение принимаетсярасположение рычага 8 перпендикулярно основанию 5, при этом приводыб отключены, а мембраны тормозныхэлементов 11 и 12 находятся под давлейием и контактируют с шарниром 9.Допустим, необходимо выйти концомрычага 8 в какую-либо точку, тогдадвижение рычага 8 происходит припоступлении на соответствующие приводы б сигналов рассогласования.Сигналы рассогласования представляют собой разность управляющих сигналов и сигналов обратных. связей, снимаемых с тензометрических датчиков15. Движение происходит до тех пор,пока сигналы тензометрических датчиков 15 не станут равны запрограммированным.Допустим, надо выйти концомрычага 8 в какую-либо точку, находящуюся с левой стороны и смещеннуюот начальной дуги вращения концарычага вверх, Для этого отключаютсятормозные элементы 11 и запитываютсяприводы 6, которые связаны с концомрычага через тросы 10. Рычаг 8 начинает перемещаться в осевом направлении до тех пор, пока конец рычагане переместится на величину смещениязаданной точки от начальной дугивращения. При выходе конца рычагана новую дугу вращения запитываютсятормозные элементы 11 осевого перемещения и отключаются тормозныеэлементы 12 поворота, а также правыйпривод б. При этом рычаг 8 начинаетвращаться в левую сторону, пока его конец не совпадет с заданной точкой, Как толькр конец рычага совпадет с заданной точкой, эапитываются .тормозные элементы 12 поворота и отключается левый привод б. Количест во модулей манипулятора и их стыковка в одной плоскости или во взаимно перпендикулярных плоскостях.) выбирается в зависимости от заданного технологического процесса, причем 10 ;необходимая траектория задается путем выведения конца манипулятора в заданные точки, координаты которых запоминаются системой управления.В зависимости от технологическо го процесса стыковка модулей производится с возможностью поворота рычагов 8 в одной плоскости, либо во взаимно перпендикулярных плоскостях. Последний модуль содержит виброгравитационную головку, с которой могут стыковаться различные захватные устройства. Подвод рабоЧейсреды, например, воздуха осуществляется, например, при помощиэлектропневмоклапана через пневмотрубку не показаны ) к отверстию верхней полости мембранной коробки 20. Необходимость подачи или отключения подачи рабочей среды в верхнюю полость мембранной коробки 30 виброгравитационной головки характеризуется тем или иным технологическим процессом. Так, например, при повороте рычагов 8 захватное устройство, закрепленное на упругой 35 подвеске 24, связанной с шарниром 22, может сохранять перпендикулярное направление к плоскости закрепления манипулятора под действием гравитационной силы. В этом случае рабочая среда в мембранную коробку не подается, а подается только тогда, когда надо жестко зафиксировать захватное устройство. Если необходимо зафиксировать захватное устройство по одной оси с последним, рычагом 8,. то в исходном положении в мембранную коробку подается рабочая среда, взаимодействующая с мембраной-тормозом 21, который прижимает шарнир 22. Если необходимо зафиксировать захватное устройство на определенный угол по отношению к последнему рычагу. Манипулятора, то этот рычаг поворачивается в нужную сторону влево или вправо ) на этот угол, причем рабочая среда в мембранную коробку не подается, затем, когда рычаг повернулся на заданный угол, подается рабочая среда в мембранную коробку (т.е. фиксируется схват ) После этого рычаг возвращается в исходное положение. Величина сканирования регулируется изменением длины упругой подвески. При ввинчивании жесткость уменьшается, при отвинчивании - увеличивается.Использование предложенного манипулятора модульного типа позволяет расширить технологические возможности за счет того, что рычаги имеют не только угловое перемещение, а также и осевое, а тормозные элементы и датчики положения выполнены непосредственно в модулях.1093538 17 В й УУ 76 г гЗ Составитель И.Вакулинатилло Техред М.Кузьма Корректор Л.Шеньо Редакто сн Заказ 33 4/ нлиал ППП "Патент", г. Ужгород, ул. Проектная,4 14НИИПИ Госудпо делам из13035, Моск ираж 1033рственного кобретений и ота, Ж, Рауш Поитета ССрытийкая наб.
СмотретьЗаявка
3554764, 17.02.1983
СЕВАСТОПОЛЬСКИЙ ПРИБОРОСТРОИТЕЛЬНЫЙ ИНСТИТУТ
ХАРИН ИГОРЬ БОРИСОВИЧ, КОПП ВАДИМ ЯКОВЛЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор, модульного, типа
Опубликовано: 23.05.1984
Код ссылки
<a href="https://patents.su/5-1093538-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Устройство для тонкой регулировки положения элемента

Номер патента: 529935
Опубликовано: 30.09.1976
МПК: B24B 5/34
Метки: положения, регулировки, тонкой, элемента
...поперечныля отверстиями, об 1 о,раэуЮсщИЛДП уПруГО-ПОдатЛИВЫЕ СТЕНКИ 5 Собращенными внутрь корпуса выступами б,На корпусе 4 посредством колец 7,8 смонтирована гайка 9 с буртом 10 и здимбой11; высота бурта 10 меньше высоты коль 15 па 7, С гайкой взаимодействует винт 12,несущий симметричный клин 13. В корпусесмонтирован регулируемый упор 14. В ва-рианте на фиг, 3 одна из стенок 15 корапуса 4 выполнена жесткой, а клин 1620 асимметричвым; сторона клина, обращенная.к стенке 15, параллельна оси винта 12.Устройство работает следующим образом,12- Вращал лимб 11 и связатиую с нпм гайку 9, сообщают винту 12 движение вдопь25оси корпуса 4, Кдин 13, взаимодействуяс выступами 6, деформирует стенки 5 кор-,пуса, Деформация стенки 5 через упор...
Устройство для регулирования положения элемента агрегата

Номер патента: 1824830
Опубликовано: 27.03.1995
Автор: Крыжановский
Метки: агрегата, положения, элемента
...5, установленную в гайке 6. На хвостовой части стержня расположен фланец крепления 7, взаимодействующий с гайкой 6. Головная часть имеет продольные пазы 8,Принцип действия устройства заключается в следующем,Посредством фланца 7 и гайки 6 устанавливается определенная длина устройства, равная длине цапфы двигателя. Стрелка-указатель 5 выставляется на одной оси с пальцем 2. Рукояткой 4 устройство вводится через отверстие шпангоута в тело Формула изобретения УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ЭЛЕМЕНТА АГРЕГАТА, преимущественно подшипника опоры двигателя летательного аппарата, содержащее полый цилиндрический стержень, установленный с возможностью взаимодействия с элементом агрегата фиксатором на Его головной части, выполненной...
Приспособление для монтажа длинномерных строительных элементов прямоугольного сечения типа свай, колонн
Номер патента: 1586311
Опубликовано: 10.07.1996
МПК: E04G 21/26
Метки: длинномерных, колонн, монтажа, прямоугольного, свай, сечения, строительных, типа, элементов
Приспособление для монтажа длинномерных строительных элементов прямоугольного сечения типа свай, колонн, включающее рычаг с прикрепленным к нему вилообразным захватом, отличающееся тем, что, с целью повышения пространственной коррекции монтируемых элементов, одно из плеч захвата совмещено с рычагом, который выполнен полым и оснащен пропущенной сквозь него с возможностью поворота, продольного перемещения и фиксации тягой, выполненной с нормально отогнутым рабочим концом и отогнутой рукояткой на другом конце, при этом в стенке рычага выполнена продольная прорезь с последовательно расположенными по ее длине поперечными карманами с возможностью последовательного заведения в карманы упором.
Захватное устройство для изделий с конусной вертикальной полостью

Номер патента: 1740303
Опубликовано: 15.06.1992
Авторы: Боринский, Вавилов, Каюков, Климов, Третьяк
МПК: B66C 1/54
Метки: вертикальной, захватное, конусной, полостью
...элементы для соединения с подъемной машиной 6, тяги 7 в виде сегментов, дополнительные тяги 8. Тяги 7 и 8 соединены между собой горизонтальными осями 9, которые установлены с возможно стью перемещения в пазах 10, выполненныхв корпусе 1 наклонно вверх симметрично относительно вертикальной оси и зеркально друг к другу. По концам основания корпуса 1 выполнены площадки 11 для фиксирова ния устройства на изделии, На оси 9 распо-ложен ограничитель 12 поворота двуплечих рычагов 2, который включает в себя пластину 13 с горизонтальным пазом 14 с двумя открытыми снизу впадинами 15 и 16. При 15 этом ограничитель 12 поворота двуплечихрычагов 2 со второй стороны связан с размещенной в пазу 14 осью 17.Телескопические элементы 4 состоят извтулок 14,...
Устройство для передачи на расстояние электрический путем определяющих положение элементов, в особенности угловых

Номер патента: 6733
Опубликовано: 31.10.1928
Автор: Карабетц
МПК: G01P 13/00, G08B 25/00, H03M 1/22
Метки: определяющих, особенности, передачи, положение, путем, расстояние, угловых, электрический, элементов
...40, изготовленной из изолирующего материала, в которой укреплена лампочка накаливания при помощи металлической заливки 41, Винтовая пробка 40 накрепко соединена с металлической, снабженной нарезкой, гильзой 42, Лампочка накаливания вместе со своей оправой может быть ввинчена в контактную пластину 43, расположенную в крышке 36. Для этой цели изолирующая пробка 40 снабжается прорезями 44, для введения в нмх штифтов от устроенных соответственным образом поворачивающих плечей, а также центральным отверстием 45, через которое может быть видно зажигание лампочки накаливания, Один полос нити лампочки выведен в металлическую заливку 41, второй же полюс той же нити выведен в шейке лампочки к пружинному контакту 46,...
Предыдущий патент: Манипулирующее устройство
Следующий патент: Рука промышленного робота
Случайный патент: Горелка для дуговой сварки в защитных газах