Способ измерения параметров движения длинномерных изделий и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
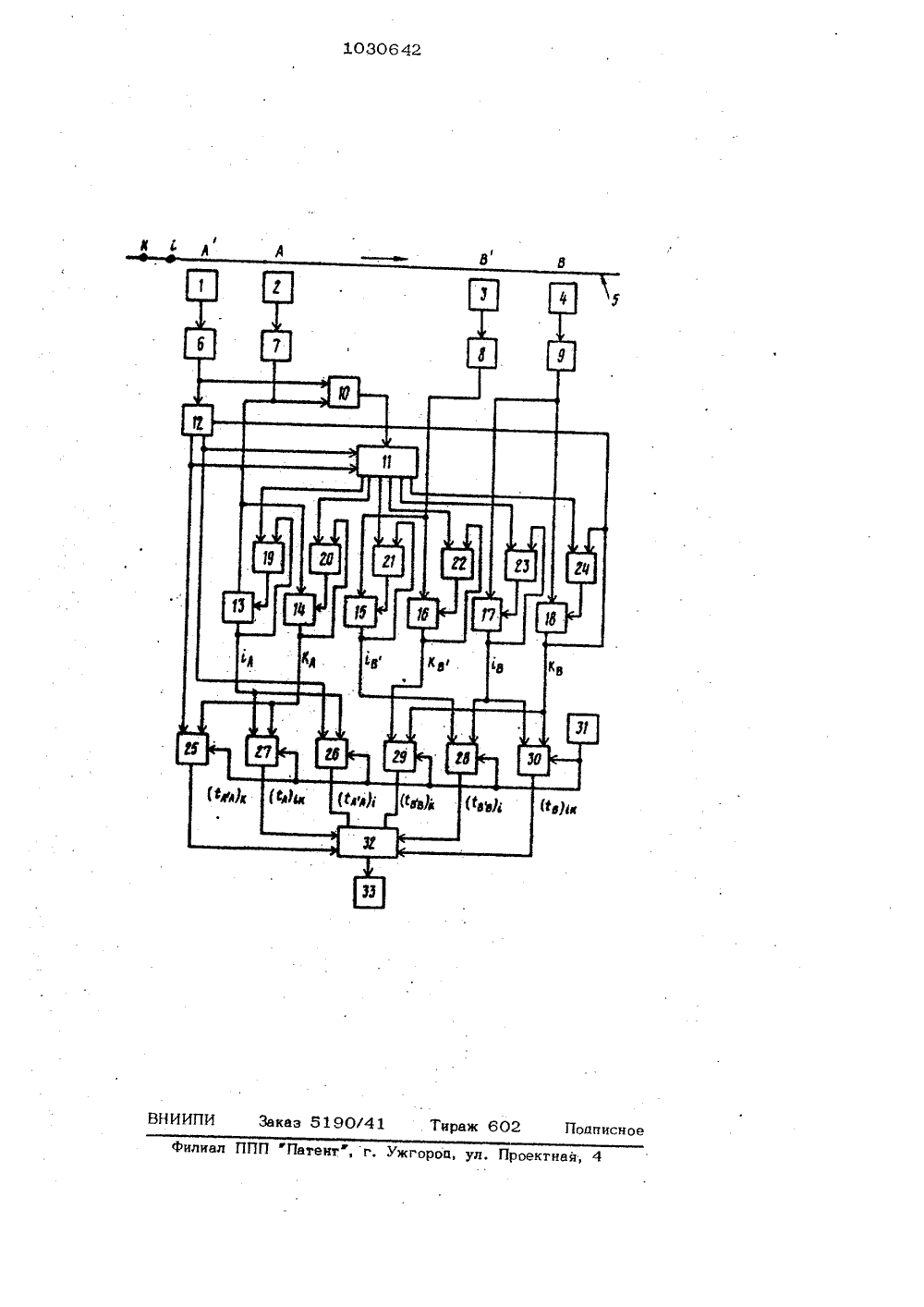
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИ РЕСПУБЛИК 041 01 Н 13/ за 6 ЕTЕНИ 2 У стройст т ния паромеика ровдерж рных иэделий, соположения изделия три формирователя, измерения скорооепинены с в ижения пли ашее три патч иненные с н ми бло ко рреляционно ходы которог лей,иг сти лип ми ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЬП ИЙ ИСАНИЕ ИЗО АВТОРСКОМУ СЕИДЕ(71) Ивановский ордена Трудового Краного Знамени текстильный институтим. М. В, Фрунзе(56) 1, Авторское свидетельство СССР670787, кл. С, 01 В 7 П 6, 1979,2. Авторское свидетельство СССРпо заявке3269557/18/10,к, 0 01 Р 15/08, 1981 (прото(54) СПОСОБ ИЗМЕРЕНИЯ ПАРОВ ДВИЖЕНИЯ ДЛИННОМЕБЕЛИЙ И УСТРОЙСТВО ДЛЯШЕСТВИЕНИЯ.(57) 1, Способ измерения параметровдвижения длинномерных иэделий, заклюлается в том, что по ходу движения иэделия устанавливают базовый и дополнительный датчики положения и измеряютвремя прохождения двумя последовательно расположенными точками изделия расстояния межпу ними, о т л и ч а ю ш игй с я тем, что, с целью расширенияфункциональных возможностей, за счетобеспечения измерения линейной деформации, устанавливают по ходу движенияизделия на фиксированном расстояниивторой базовый и второй дополнительныйдатчики, положения, измеряют время прохождения двумя последовательно расположенными точками изделия расстояниямежду этими датчиками и время прохождения участком, ограниченным двумя последовательно расположенными точкамииэделия, расстояния между первым ивторым базовыми датчиками положения. 1 О 3064 дами первого и второго формировате пять ключевых элементов и пять тр геров, выход кажпого иэ которых соединен с первым входом соответствующего ключевого элемента, генератор тактовых импульсов, вычислительный блок с индикатором и пва счетчика, соединенные с входами вычислительного блоке, о т л ич а ю ш е е с я тем, что, оно снабжено блоком выделения двух послеповвтельно расположенных точек изделия, четвертым датчиком положения и соединенным с ним четвеотым формирователем, блоком опознамния дву.х последовательно расположенных точек изделия последовательно соединенными шестым триггером и шестым ключевым элементом, и четырьмя счетчиками, вход блока выделения двух последовательно расположенных точек изделия соединен с выходом первого фор рователя, первый выход - с разреша 1 ощим входом первого счетчика и первым входом блока опознавания двух последовательно расположенных точек изделия, второй выход - с разрешающим входом третьего счетчика и вторым входом блока опознавания двух последовательно расположенных точек изделия, выход первого ключевого элемента соединен с разрешающим входом второго счетчика. запрещающим входом третьего счетчика и. всрым входом первого триггера, выход второго формирователя соединен с вторыми входами первого и второго ключевых элементов, выход второго ключевого эле мента соепинеи с запрещающим входомпервого и второго счетчиков и вторымвходом второго триггера, выхоц третьегоформирователя соединен с Вторыми вхоцами третьего и четвертого ключевыхэлементов, выхоц третьего ключевогоэлемента соецинен с разрешающим вхоцом пятого счетчика и Вторым входомтретьего триггера, выход четвертогоформирователя соединен с вторьеми вхо.дами пятого и шестого ключевых элементов, выхоц четвертого ключевого элемента совцинен с разрешающим вхоцом четВертого счетчика и вторым входом четВертого ключевого элемента, выход пятого ключевого элемента соецинее 1 с заПРЕщаИЩИМ ВХОДОМ ПЯТОГО С" 1 ЕТЧИКа РаЗсарешающи 1 Вхопом шестого, четт 1 ика ивторым входом пятого триггера, выходшестого кл 1 очевого элемента соединен сзапрещающими входами четвертого и шестого счетчиков,. вторым входом шестого триггера и третьим выхОцом блока выце: ленни двух подлецовательно расположенных точек изделия, пеовые входы триггеров соединены с соответствующими выхо.-.-: дами блока Опознавания пвух последовательно расположенных точек изцелия, вы: хоп генератора тактовых импульсов соецинен со счетными входами счетчиков,выход каждого из которых соединен с соот=ветствуюшим входом вычислительного блока.ЗО Изобретение относится к вычислительной технике и предназначено цля измере=ния линейных пвформаций цлинномерныхизделий, например ленты, ровницы, нитииз натуральных и химических волокон впроцессе формирования процуктов пр 1 цения на текстильных машинах,Известен способ измерения параметровцЬижения цлинномерных изделий, зикпючак 1 щийся в том, что по ходу цвижения из 1 Оделив устанавливают базовый и цопопнительный цатчики положения и измеряютвремя прохожцения двумя послецовательно расположенными точками изцелия расстояния межцу ними 1,Недостатком способа являются ограниченные функциональные возможности,так как невозможно измерять линейныецвформации изцвлия,Известно устройство цля измерения парамвтров цлинномерных изцелий, соцер=жащее три датчика положения изделия исоединенные с ними три формирователя,блок корреляционного измерения скорости, входы которого совцинены с выходами первого и второго формирователей,пять ключевых элементов и пять триггеров, выхоц каждого из которых соединенс первым входом соответствующего клю-.чевого элемента, генератор тактовыхимпульсов, вычислительный блок с инцикатором и цва счетчика, соецчнвнные свходами вычислительного блока Г 2Нвцостаток устройства - ограниченныефункциональные возможности. 35 2Цель изобретения - расширение функци= ональных возможностей за счет обеспече= ния измерения линейной цеформации.Поставленная цель постигается тем, что согласно способу измерения парамет.= ров движения атпиномерных изцелеп 1, заключавшемуся в том, что по ходу движе:- ния иэделия устанавливают базовый и цополнительный датчики положения и из= меряют время прохождения двумя послецовательно расположенными точками из= пелия расстояния между ними, устанав-.- ливают по ходу движения изцелия на фиксированном расстоянии второй базовый и второй цополнительный цатчики положения, измеряют время прохожпенич двумя последовательно расположенными точками изцелия расстояния между этими датчиками и время прохожцения участком,. ограниченньем двумя последовательно расположенными точками изделия, расстояния между первым и вторь 1 м базовыми датчиками положения. Кроме того, устройство цля измерения параметров цВижения цлинноме рных из целий, соцержашее три датчика положения изделия и соепеп 1 енные с ними три формирователя, блок корреляционного измерения скорости, входы которого соецепяны с выходами первого и второго формирователей, пять кл 1 очевьех элементов и пять триггеров, выход кажпого из которых соединен с первых входом соот-: ветствующе 1 о ключевого элемента; ге. - ИЕРаТОО таКТОВЫХ ИМПУЛЬСОВ ВЫИИСПИ=.3 10306 тельный блок с инцикатором и два счетчика, соединенные с входами вычислительного блока, снабжено блоком вьщеления двух послецовательно расположенных точек изделия, четвертым датчиком положения и соециненным с ним четвертым формирователем, блоком опознавания двух последовательно расположенных точек изделия последовательно соециненными шестым триггером и шестым ключевым 10 элементом, и четырьмя счетчиками, вход блока выделения двух последовательно расположенных точек изцелия соединен с выходом первого формирователя, первый выход - с разрешающим входом первого 1 Б счетчика и первым входом блока опознавания двух последовательно расположенных точек изделия, второй выход - с разрешающим входом третьего счетчика и вторым входом блока опознавания цвух 20 последовательно расположенных точек изделия, выхоц первого ключевого элемента соединен с разрешающим входом второго счетчика, запрещающим входом третьего счетчика и вторым входом 25 первого триггера, выход второго формирователя соединен с вторыми входами первого и второго ключевых элементов, выход второго ключевого элемента соецинен с запрещающим входом первого и вто-З 0 рого счетчиков и вторым входом второго триггера, выход третьего формирователя соединен с вторыми входами третьего и четвертого ключевых элементов, выхоц третьего ключевого элемента соединен с35 разрешающим входом пятого счетчика и вторым входом третьего триггера, выход четвертого формирователя соединен с .вторыми входами пятого и шестого ключевых элементов, выход четвертого ключевого элемента соединен с разрешающим входом четвертого счетчика и вторым входом четвертого ключевого элемента, выхоц пятого ключевого элемента соединен с запрещающим входом пятого счет- . чика, разрешающим входом шестого счетчика и вторым входом пятого триггера, выход шестого ключевого элемента сое динен с запрещающими входами четвертого и шестого счетчиков, вторым входом50 шестого триггера и третьим выходом блока вьщеления двух послецовательно расположенных точек изделия, первые входы триггеров соединены с соответствующими выходами блока опознавания двух последовательно расположенных точек изделия, выход генератора тактовых импульсов соединен со счетными входами счетчиков, выход каждого из которых соединен с соответствующим входом вычислительногоблока,На чертеже показана блок-схема описываемого устройства.Устройство соцержит четыре датчика 1 - 4 положения изделия 5, нити, установленные Моль линии его движения и связанные своими выходами с четырьмя формирователями 6 - 9 импульсов, блок 10 корреляционного измерения скорости, блок 1 1 опознавания двух последовательно расположенных точек изделия, блок 12 вьщеления цвух последовательно расположенных точек изцелия, ключевые элементы 13 - 18, триггера 19 - 24, счетчики 25 - 30, генератор 31 тактовых импульсов, вычислительный блок 32 с индикатором ЗЗ.Выходы формирователей 6 и 7 соединены с входами блока 10 корреляционного измерения скорости, выход которого соединен с одним из входов блока 11опознавания двух последовательно расположенных точек изделия, выход формирователя 6 соединен с входом блока 12выделения послецовательно расположенныхточек изделия а формирователь 7 соединен с основными входами ключевых элементов 13 и 14. Выход формирователя 8 соецинен с основными входами ключевьы,элементов 15 и 16, а выход формирователя 9 соеццнен с основными входами ключевых элементов 17 и 18, Выходы блока 11 соецинены соответственнос одним из входов триггеров 19 24,выходы которых соединены соответственнос управляющими входами элементов 1318, выходы которых соецинены с цругими входами триггеров 19-24. Выходыблока 12 соединены с разрешающимивходами счетчиков 25 и 26. Выход элемента 13 соединен с разрешающими вхоцами счетчика 27 и запрещающим входом счетчике 26, выход ключевого элемента 14 соединен с запрещающими вхоцами счетчиков 25 и 27. Счетные входысчетчиков 25 - 30 соединены с генератором 31 тактовых импульсов, а выходыэтих счетчиков соединены с входами исходных данных блока 32, выход результата измерения которого соединен с индикатором 33,Сушность способа заключается вследующем,На длинномерном изцелии, напримернити, существуют цефектные утолщенияузлы, сукрутины и другие) которыепрп прохождении мимо датчиков положе 1030642 6ния вызывают появления импульсныхсигналов. Если в качестве двух последовательно расположенных точек изделиявыбрать соседние дефектные утолщения 1и В нити, и измерять время прохожденияэтими утолщениями расстояния междупервыми базовыми (П 4) и дополнительными (А) патчиками положения, а затемизмерять время прохождения этими утопщениями расстояния между вторыми базовыми М и дополнительными (В) датчиками положения и время прохождения учась.ком, ограниченными этими утолщениями,расстояния между первым и вторым базовыми датчиками положения, то, используя полученные значения, величину относительной линейной деформации можнополучить из формулы где (1); - время прохождения утолщвнием 1 расстояния междуьдатчиками А А;),- время прохождения утолЛ 1 сщениемрасстояния между датчиками АА;(Ф. ).- время прохождения дефектб 1 Кным участком 1 Ф базовогодатчика В;(,1 )- время прохождения дефектл 1 Мным участком 1 М базовогодатчика А;1. - времй прохождения утолшв.ВО)1нием 1 расстояния междудатчикам,и В В;68) - время прохождения утолщением 1 с расстояния междудатчиками В В,Способ с. помощью устройства осуществляется следующим образом.Информация о наличии дефектных утолщений снимается датчиками 1 - 4 и подается на формирователи 6 - 9 импульсоа, где происходит формирование короткик импульсов от дефектных утолщенийнити 5, Формирование импульсов от дефектных утолщений происходит за счетпрввьппения ими сигналов заданного уровня, С выхода формирователя 6 импульсыот дефектных утолщений поступают вблок 12, гав выделяются сигналы отследующих друг за другом утолщений,после чвго работа блока 12 блокируетсядо прохождения выявленными дефектными 10 15 20 25 ЗО 35 40 утолщениями (1 и ) всех чатыр;х датчиков 3. - 4.Б блоке 11 определяется наиболее вероятное время прохождения соседними дефектными утолщениями датчиков 2 - 4, с учетом скорости движения нити, момен тов прохождения соседних дефектных утол щений мимо датчика Х и девиации скорости нити 5,.С блока 3.1 импульсы, соответствующие наиболее вероятному прохождению соседних дефектных утолщенийи % мимо датчиков 2 -: 4, поступают на один иэ входов соответствующих триггеров Х 9 - 24, которые удерживают ключевые элементы 13-18 в открытом состоянии от момента наиболев вероятного ожидания до момента прихода импульсов соседних дефективных утолщений 1 и Кс формирователей 7-9, Таким образом, на выхоае ключевого элемента 13 определится импульс 1 д, характеризующий прохождение дефектйого утолщения а мимо датчика 2, ;На выходах ключевых элементов 3.4-18 определятся импульсы Ж 1Импульсы с блока 12 и ключевых элементов 13-18 поступают на входы счетчиков 25:-30, гпе левый вход счетчиков- разрешение на начало счета импульсов с генератора 31 тактовых импульсов, а правый вход - запрещение на счет тактовых импульсов. Частота генератора 31 выбирается из требуемой точности и масштаба измерений. Счетчик 25 определяет временный интервал ( 1,) , соответственно счетчики 2730 определяют ю- тервалы (Ф ), ( А 1 );, (1) Ов );, ( б );1 8 выходор счетчиков 25-30 зйачения указанных временных интервалов пОступают на входы исхопных данных блока 32, гпе вычисляется зави= сим Ость Изобретение позволяет повысить качество продуктов прядения эа счет установления допустимых границ изменения линейной деформации в короткие промежутки времени и повысить производительность оборудования, так как обеспечивает своевременную наладку технологического оборудования по полученным диагностическим сигналам,
СмотретьЗаявка
3373252, 29.12.1981
ИВАНОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ТЕКСТИЛЬНЫЙ ИНСТИТУТ ИМ. М. В. ФРУНЗЕ
ГУСЕВ БОРИС НИКОЛАЕВИЧ, ГАЛАТА ВЛАДИМИР ЮРЬЕВИЧ
МПК / Метки
МПК: G01B 7/04
Метки: движения, длинномерных, параметров
Опубликовано: 23.07.1983
Код ссылки
<a href="https://patents.su/5-1030642-sposob-izmereniya-parametrov-dvizheniya-dlinnomernykh-izdelijj-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения параметров движения длинномерных изделий и устройство для его осуществления</a>
Устройство для считывания графической информации

Номер патента: 934511
Опубликовано: 07.06.1982
Авторы: Алиев, Колесников
МПК: G06K 11/00
Метки: графической, информации, считывания
...состояние и через элементыИ 13 подключает выход счетчика 7 ко,входу регистра 16. Блок 14 осуществляет поразрядное сравнение кодов ординат, полученных на предыдущей и последующей строках развертки и поступающих на его входы через переключатель17 с выходом регистров 15 и 16. Высокий разрешающий потенциал на выходе блока 14 будет только при неравенстве кодов. В этом случае второй 20элемент И 9 открывается, и импульссчитывания, задержанный элементом10 задержки на время передачи кодаординаты из счетчика 7 в регистр 16,а также на время сравнения в блоке14 поступает в блок 8 для уйравленияприемом координат с регистра 16 исчетчика 3.Следующий цикл считывания графической информации. заканчивается тем, Зоцто импульс считывания через...
Система связи с адаптивной дельтамодуляцией

Номер патента: 711695
Опубликовано: 25.01.1980
Автор: Витенберг
МПК: H04J 7/00
Метки: адаптивной, дельтамодуляцией, связи
...подключен ко входу блока последовательного сравнения и к первому входу интегратора, выход которого подключен ковходу компаратора, а также тактовый генератор, первый выход которого подключен к другому входу решающего блока, и программируемый генератор, выход которого подключен ко второму входу интесинхронизации, вход которого соединен совходом блока последовательного сравнеход которого подключен ко входу фильтра нижних частот, а также программируемыйгенератор,. выход которого подключен ковторому входу интегратора, о т л и ч г юш а я с я тем, что, с целью повышенияпомехозашищенности, на передающей стороне введены регистр сдвига и сумматор,при этом выходы блока последовательногосравнения и тактового генератора подключены соответственно к...
Способ диагностирования объекта, состоящего из последовательно соединенных функциональных блоков, охваченных обратными связями, и устройство для его осуществления

Номер патента: 1667013
Опубликовано: 30.07.1991
МПК: G05B 23/02
Метки: блоков, диагностирования, обратными, объекта, охваченных, последовательно, связями, соединенных, состоящего, функциональных
...устаиов тс" с,Гнь "и", При этОм напряжение на выхсдеГИ2;нбудет убыва Гь 17Где Ч на, НЗПРЯХ(8 ИС О,"ОХ(птеЛЬОГО а - сыщения усилиГеля В; Р - сопротивлен 8 резистора 42; 1 о - в ре м я в о эдей с 1; я сигнала "0". При неодио:.ратном ПОВтОреНИИ СбОЕВ НаПГЯ-"ИИ Иа =.:":Огак ГЛИН 21 (фиГ, ) будет Гропорцнон:.,ь ОЧвых - К 111 - К 2 то, где К 1=1/В 1, Кр=1/В 2. К 1 иК 2 подбираются для каждого ГЛИН, исходяиз статистических данных о числе и продолжительности сбоев, допустимых для блоков1 - 6: 5При каждом отказе блоков 1-6 сигнал"1" с датчиков 7 через элемент ИЛИ 25поступает на управляющий вход блока 22вычисления максимума. Этот сигнал закрывает ключ 33 (фиг. 3), отключая питание от 10конденсатора 31. Конденсатор 31 разряжается через резистор...
Устройство для автоматической фиксации выхода пресс-изделия

Номер патента: 419843
Опубликовано: 15.03.1974
Авторы: Альтерман, Изобретени
МПК: B30B 15/26, G05B 11/26
Метки: автоматической, выхода, пресс-изделия, фиксации
...Следовательно, левая половна лампы 6 открыта, а 5 правая заперта отрицательным напряжениемсмещения, задаваемым ца сетку правой половины лампы делителем напряжения, образованного резисторами 8 и 9, включенным между анодом левой половины лампы 6 и источ- О ником отрицательного напряжения. Положи20 25 зо 35 тельным потенциалом, снимаемым с делителя напряжения, образованного резисторами 10 и 11, и подаваемым через диод 12 па сетку правой половины лампы 13, последняя держится в открытом состоянии. Диод 14 при этом разрывает цепь (потенциал входа выходного ап. парата 5 выше потенциала на аноде открыгой правой половины лампы 13). Как только па накопительном устройстве 2 будет зафиксирована заданная длина изделия, в цепи диода 7 создается...
Стробоскопический преобразователь электрических сигналов последовательности импульсов
Номер патента: 1386914
Опубликовано: 07.04.1988
Авторы: Березовский, Громницкий, Сидор
МПК: G01R 13/02
Метки: импульсов, последовательности, сигналов, стробоскопический, электрических
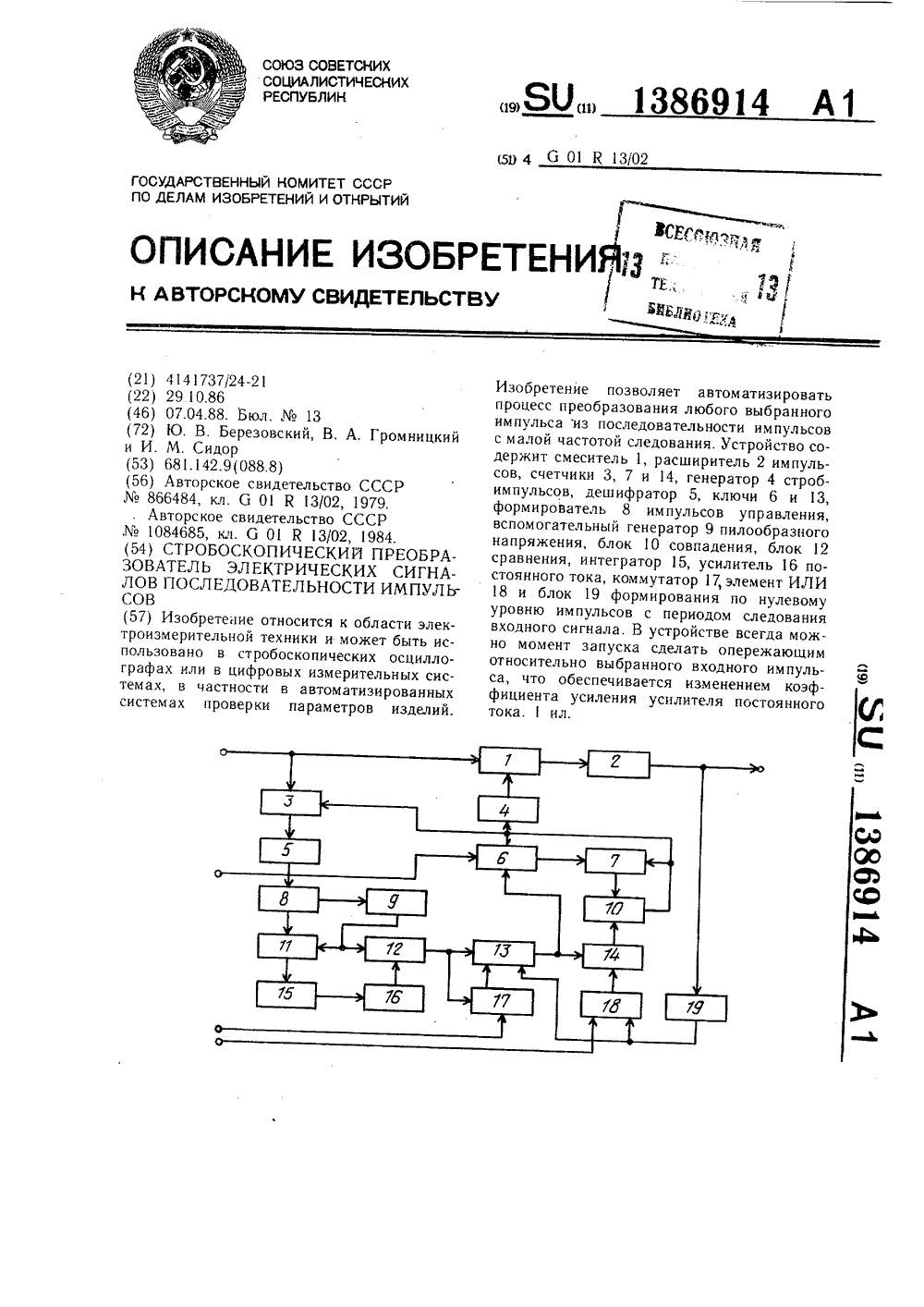
...импульсов. Этот формирователь вырабатывает импульс, равный по длительности всей последовательности импульсов (пачки импульсов) для запуска вспомогательного генератора 9 пилообразного напряжения, и импульс, равный по длительности времени 7 от начала последовательности до приходаимпульса, порядковый номер которого записан в регистре формирователя. Этот импульс управляет работой ключа 11, на аналоговый вход которого подается пилообразное напря-жение от вспомогательного генератора 9.С выхода ключа 11 это пилообразное напряжение заряжает конденсатор интегратора 15 до напряжения, величина которого зависит от времени открытого состояния ключа 11, т. е. от выбора порядкового номера импуль-са входной последовательности. Это напряжение...
Предыдущий патент: Устройство для измерения геометрических размеров изделий
Следующий патент: Устройство для определения остатка полосы в разматываемом рулоне
Случайный патент: Устройство для тонирования краски