Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 741231
Авторы: Жуковский, Твердохлебов
Текст
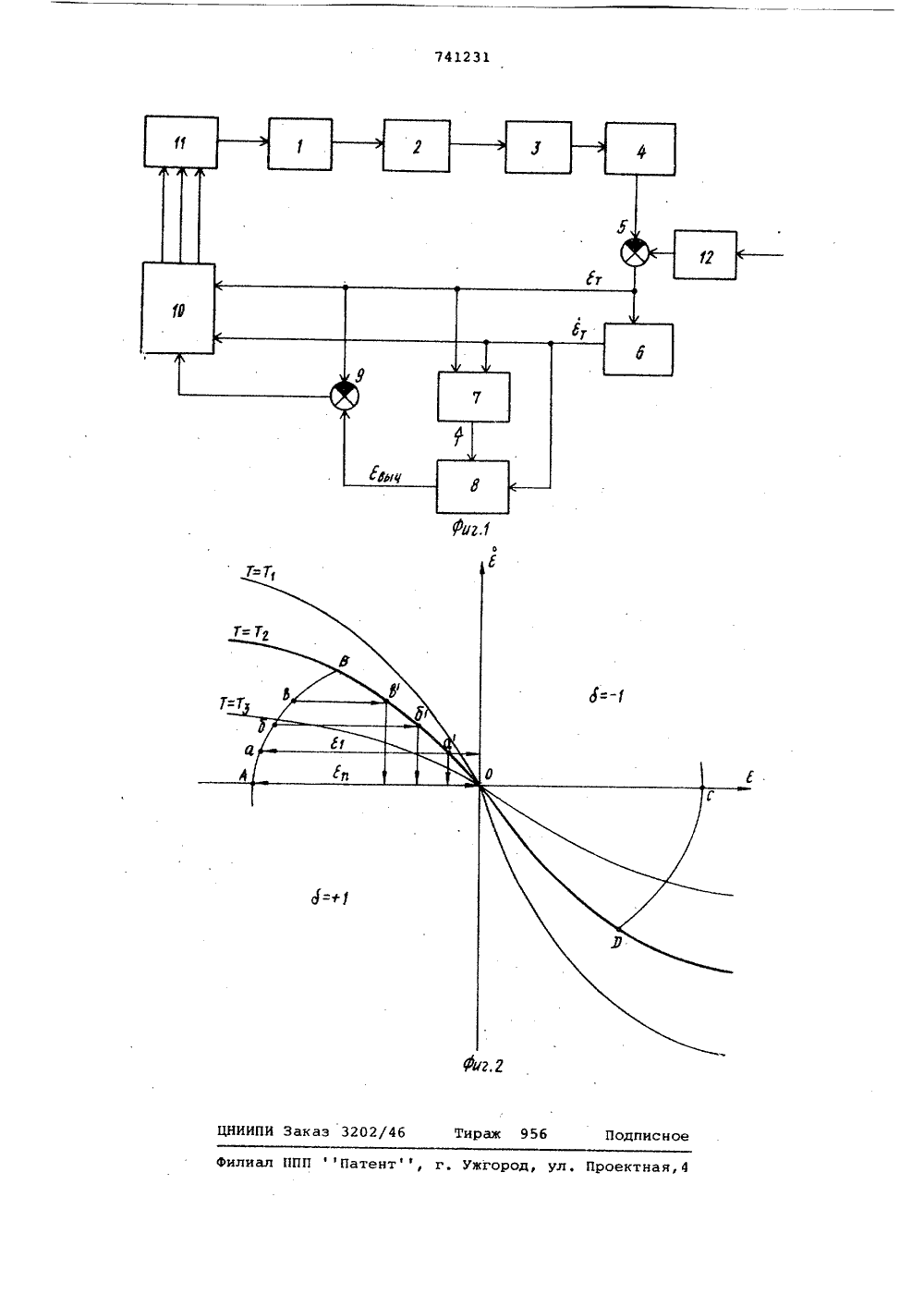
Союз Соаетских Социалистических РеспубликОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИ ЕТЕЛЬСТВУ нц 741231(51)М. Кл. С 05 В 11/16 Государственный комитет СССР по делам изобретениИ и открытий(54) СИСТЕМА УПРАВЛЕНИЯ с.истема относится к области автоматического управления и предназначена для обеспечения оптимального по быстродействию управления объектом второго порядка, для которого, как известно, оптимальный по быстродействию алгоритм управления состоит из двух интервалов. На .каждом из них управляющее воздействие имеет максималь 1 О но возможное значение, но противоположные знаки. Соответственно их называют первым и вторым интервалом постоянства управляющего. воздействия,Для повышения качества процесса управления, а также производительности оборудования существуют устройства управления, реализующие оптимальные по быстродействию алгоритмы. В кьазиоптимальной системе управления 1 алгоритмы ее обучения воспроизведению оптимальной линии переключения осуществляются в процессе нормальной работы на основе использования скользящего режима на втором интервале управленияНедостатком такой системы является то, что в случае управления объектом с переменными параметрами обучение может продолжаться несколько циклов осуществления переходного процесса, в течение которых этот процесс существенно отличается от оптимального.Наиболее близким по технической сущности к предлагаемой системе является устройство для автоматического управления, которое содержит последовательно соединенные релейный усилитель, сервомотор, объект управления, измеритель выходной величины, первый элемент сравнения, блок дифференцирования, а также задатчик входной величины, соединенный с вторым входом первого элемента сравнения (2) .Недостатком данного устройства является обеспечение квазиоптимального по быстродействию управления объектом только при изменениях коэффициента усиления объекта. При изменениях постоянной времени объекта процесс управления отличается от оптимального.Целью изобретения является повынение быстродействия системы управления объектом второго порядка с переменной постоянной времениЦель достигается тем, что система дополнительно содержит последовательно соединенные блок определения постоянной времени, функциональный преобразователь, второй элемент сравнения, логический блок и формирователь управляющего воздействия, выход которого соединен с входом релейного усилителя, причем выход первого элемента сравнения соединен с первым входом блока определения постоянной5 времени и вторыми входами второго элемента сравнения и логического блока, выход блока дифференцирования соединен с вторыми входами блока определения постоянной времени и функцио 10 нального преобразователя и с третьим входом логического блока.Блок-схема системы автоматического управления применительно к объекту второго порядка приведена на фиг, 1. 15Система содержит релейный усилитель 1, исполнительный механизм 2; объект управления 3, измеритель 4 выходной величины, первый элемент сравнения 5, блок дифференцирования б, блок 7 определения постоянной времени, функциональный преобразователь 8, второй элемент сравнения 9, логический блок 10, формирователь управляющего воздействия 11, задатчик 12 входной величины.При подаче управляющего воздействия задатчик 12 выдает на первый элемент сравнения сигнал, пропорциональный задающему воздействию. Этот сигнал сравнивается с выходным сигналом ЗО измерителя 4 выходной величины. Полученный сигнал ошибки Ет поступает на входы блока дифференцирования б, блока 7 определения постоянной времени и логического блока 10. Блок опре деления постоянной времени по значениям сигнала ошибки Ят и скорости изменения ошибки Я формирует сигнал, определяющий действительное значение постоянной времени объекта управле ния, Этот сигнал поступает на вход функционального преобразователя 8, на второй вход которого подается сигнал с выхода блока дифференцирования.Выходной сигнал функционального преобразователя определяет величину координаты с линии переключения, соответствие которой действительным параметрам объекта определяется выходным сигналом блока 7 определения постоянной времени, Второй элемент сравнения 9 определяет разность между вычисленным св,ц и текущим значениями ошибки, снимаемыми соответственно с выхбдов функционального преобразователя и первого элемента сравнения 5. 55 Сигнал с выхода второго элемента сравнения поступает на логический блок 10, который формирует логические переменные (двоичные сигналы), соответствующие знакам и нулевым значениям ц) фазовых координат ЕТ и, а также знаку выходного сигнала второго элемента сравнения. По сочетанию логических переменных формирователь управляющего воздействия 11 определяет знак управ ляющего воздействия, в зависимости от которого репейный усилитель 1 включает исполнительный механизм и приводит в движение объект управления в ту или другую сторону.Рассмотрим работу отдельных узлов системы при управлении объектом, представляющим собой последовательно включенные апериодическое и интегрирующее звенья. Переменным параметром является постоянная времени Т, Уравнение линии переключения для такого объекта имеет вида()ЧА ф" ЮЮ где 6 = д (1) - Ч(1); д (1) и Ч(1) соответственно задающее воздействие и выходная величина объекта управления;д - управляющее воздействие;К - коэффициент усиления объектауправления.Коррекция (выбор из семейства) линии переключения в зависимости от текущего значения параметра Т осуще ствляется на первом интервале постоянства управляющего воздействия путем изменения алгоритма работы функционального преобразователя 8 с помощью блока 7 определения постоянной времени.Между координатами траектории движения изображающей точки в фазовом пространстве на первом интервале постоянства управляющего воздействия и координатами линии переключения существует функциональная связь определяемая выражением:/)Ее,-ете(ваап е)чУ ь ,н 11: а,где Е 1, Е 1 - величина абсциссы фазовой траектории соответственно на первом интервале управления и при Я =оБлок определения постоянной времени производит оценку параметра Т по формулеОценка параметра Т осуществляетсядискретно при каждом изменении величины ошибки Г на единицу дискретности,поэтому частота вычисления параметраТ определяется скоростью измененияЕ Дискретность представления Я определяется допустимым отклонениемвремени протекания переходного процесса от оптимального,функциональный преобразователь 8определяет вычислительное значение, 74123135 Поскольку управляющее воздействие д принимает три значения, то формирователь управляющего воздействия 11 имеет два двоичных выхода. Если обозначить логические сигналы, снимаеыяе с этих выходов, через д + и д тогда при положительном управляющем воздействии необходимо иметь 81 и д = О, при отрицательном 45 50 На фиг. 2 поясняется предложенный принциг. самонастройки. В зависимости от знака управляющего воздействия самонастройка осуцествляется либо на участке АВ, либо на участке ст . 1 О Величина Е запоминается в блоке 7 в момент перехода изображающей точки через ось абсцисс. Затем при движении изображаюцей точки, например, по траектории АЪ иэ семейства линии переключения выбирается линия переключе" ния, соответствующая текущему значению параметра Т (например, Т=Т 1) и определяются значения фазовой координаты Г линии переключения. Например, в точке О фазовой траектории определяется абсцисса точки О линии переключения, в точке 0 - абсцисса точки 6 и т. д.Формирователь управляющего воздей. ствия 11 по логическим сигналам бло ка 10 вырабатывает управляющее воздействие , определяемое по формулед = - здцпб,воздействии - Юфи б =1, при нулевом - Ю= 0 и Ю : О.Предлагаемая система, как следует из описания и приведенного, алгоритма управления, обеспечивает оптимальность по быстродействию только при ступенчатом задающем воздействии и может использоваться для управления позиционными системами. Система обеспечивает оптимальное по быстродействию управление любым объектом второго порядка. При этом изменяются соответственно лишь алгоритмы работы блока настройки 7 и функционального преобразователя В,формула изобретения Система управления, содержащаяпоследовательно соединенные релейиый усилитель, исполнительный механизм, объект управления, измерительвыходной величины, первый элементсравнения, блок дифференцирования,а также задатчик входной величины,соединенный,с вторым входом первогоэлемента сравнения, о т л и ч а -ю щ а я с я тем, что, с целью повышения быстродействия системы, в неевведены последовательно соединенные,блок определения постоянной времени,функциональный преобразователь,второй элемент сравнения, логический блок и формирователь управляющего воздействия, выход которого соединен с входом релейного усилителя,причем выход первого элемента сравнения соединен с первым входом блока определения постоянной времени ивторыми входами второго элементасравнения и логического блока, выходблока дифференцирования соединен с,вторыми входами блока определения постоянной времени и Функциональногопреобразователя и с третьим входомлогического блока.Источники информации,принятые во внимание при экспертизе1Авторское свидетельство СССР9 415663, кл. 6 05 В 11/16, 25.,01.71.лиал ППП Патентф, г. Ужгород, Ул. Проектна ЦНИИПИ Заказ 3202/4 741231 ираж 95 пиона
СмотретьЗаявка
2505575, 05.07.1977
ПРЕДПРИЯТИЕ ПЯ А-1081
ЖУКОВСКИЙ ВЛАДИМИР ГРИГОРЬЕВИЧ, ТВЕРДОХЛЕБОВ НИКОЛАЙ ФИЛИППОВИЧ
МПК / Метки
МПК: G05B 11/16
Метки:
Опубликовано: 15.06.1980
Код ссылки
<a href="https://patents.su/4-741231-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Идентификатор возмущающих и управляющих воздействий
Номер патента: 873209
Опубликовано: 15.10.1981
МПК: G05B 23/00
Метки: воздействий, возмущающих, идентификатор, управляющих
...1 , 2 , 3Ьучастка АВ фазовой траактории (фиг. 1). Ключ 19 служит для подклю чения выхода экстраполятора к первому входу блока 14 сравнения. Искомые значения возмущающего воздействия Г на интервалах участкаОА (фиг. 1) получают на выходе делителя 9 напряжения, коэффициент деления которого равен двум. Значения управляющего воздействия рс на интервалах участка АВ (фиг. 1) получают на выходе блока 14 сравнения блокаформирования разности сигналов б.Идентификатор работает следующимобразом,В процессе движения объекта управления с выключенным исполнительныморганом на участке ОА (фиг. 1) в пер-.вой точке (точке 1) с коммутатора подается управляющий сигнал на вторыевходы блоков 4 и 5, соединенные совторыми входами их вторых ключей 12,которые...
Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью

Номер патента: 1476432
Опубликовано: 30.04.1989
Авторы: Авдеев, Гавриков, Мартынов, Мышляев, Попов, Рассадин, Соловьев
МПК: G05B 13/02
Метки: воздействий, дуговой, избыточным, например, объектом, управляющих, числом, электропечью
...алгебраически суммируется во втором сумматоре 26 с сигналом У (с ) о втогром управлении, измеренном вторым задатчиком 5 и задержанном во втором блоке 21 задержки на времязапаздывания второго канала управления. На выходе второго сумматора 26 полуечается сигнал 0 о восстановленном1 71 с злвплыллчм 1БтороГ об 1)азономуправленц, раный 1 гг)-г(г.- г ) + У. ) 15 де Б,р ) и Б . ) - выходной ивходной сигна лы ограничителя 29. л где Бг(1- ) - реализованное второе управление; 1 О У - обратная модель второго канала; заданное значение выхода объекта; У. ) скорректированное значение выхода объекта. Сигнал 1, (й- (г) экстраполируется на время ( экстраполятором 30 и подается на ограничитель 29 с ха-. рактеристикойБ (С) при 1.1 г(С) 13 И), =11 И),...
Программируемый формирователь управляющих воздействий микропроцессорной системы
Номер патента: 1725210
Опубликовано: 07.04.1992
Метки: воздействий, микропроцессорной, программируемый, системы, управляющих, формирователь
...запускается сигналом с выхода триггера 62, который устанавливается по переднему фронту тактовой частоты при подаче сигнала "Пуск" по входу 17. Высокий уровень напряжения с прямого выхода триггера 62 поступает на С-вход триггера 61 защелки и разрешает прохождение на счетчик 29 "Тактовой частоты счетчика" с входа 15.С этого момента счетчик 29 начинает отсчитывать импульсы тактовой частоты, а выходы первой секции счетчика 29 поступают на схему 4 сравнения (фиг.9),В момент подачи сигнала "Пуск" счетчик 40 адреса обнулен. Выходы его через коммутатор 45 подключены к адресной шине запоминающего устройства 3, поскольку нет обращения к запоминающему устройству 3 по параллельной записи и чтению. По той же причине сигналы 33, 37, 38 находятся...
Пневматический блок сравнения

Номер патента: 257874
Опубликовано: 01.01.1969
Автор: Потепалов
МПК: G06G 5/00
Метки: блок, пневматический, сравнения
...с атмосферой, а в глухой камере установлена пружина.На фиг. 1 изображен пневматический блок сравнения; на фиг. 2 - схема блока при выполнении узла ограничения в виде дросселя; 20 на фиг. 3 - схема блока при выполнении узла ограничения в виде соединения одномембранного элемента с дросселем; на фиг. 4 - узел ограничения в виде одномембранного элемента с обратным клапаном, 25Пневматический блок сравнения (фиг. 11 содержит входной одномембранный элемент 1, камеры которого соединены с входными каналами Р, и Р, а сопло через узел 2,ограничения и дроссель 3 - с атмосферой и с глухой 30 4. Проточная камера эле ссель б соединена с источ епосредственно с выхюдньтх257874 ние Р,м, до величины давления питания. Если Рг)Р 2, то мембрана элемента 1...
Блок сравнения

Номер патента: 1550430
Опубликовано: 15.03.1990
Автор: Березовский
МПК: G01R 19/10, H02H 3/40
...на выходе резисторов 34 и 35 даетвозможность соединять раэнополярныевыводы формирователей 21-23 модулей,что позволяет получить напряжения,пропорциональные разности входныхсигналов, Таким образом, на вход формирователей 1-3 модулей второй ступени подаются соответственно сигналы,Формирователи модуля второй сту ени построены на основе операционных усилителей 4, в цепь обратнойсвязи которых включены встречно-параллельные диодно-резистивные цепоч 40ки, состоящие из диодов 6 и 8 и резисторов 5 и 7. При необходимости вцепь обратной связи с помощью переключателя 9 возможно подключить сглаживающий конденсатор 10. На выходных 45клеммах "Плюс" и "Минус" модулей 1-3формируются модули разностей входныхсигналов- 1,+ 1 в 1,1 с1 в ь1 1 - 1 с 1...
Предыдущий патент: Счетчик ходов для шахматных часов
Следующий патент: Блок самонастройки для систем управления подачей металлорежущего станка
Случайный патент: Способ усиления резин