Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
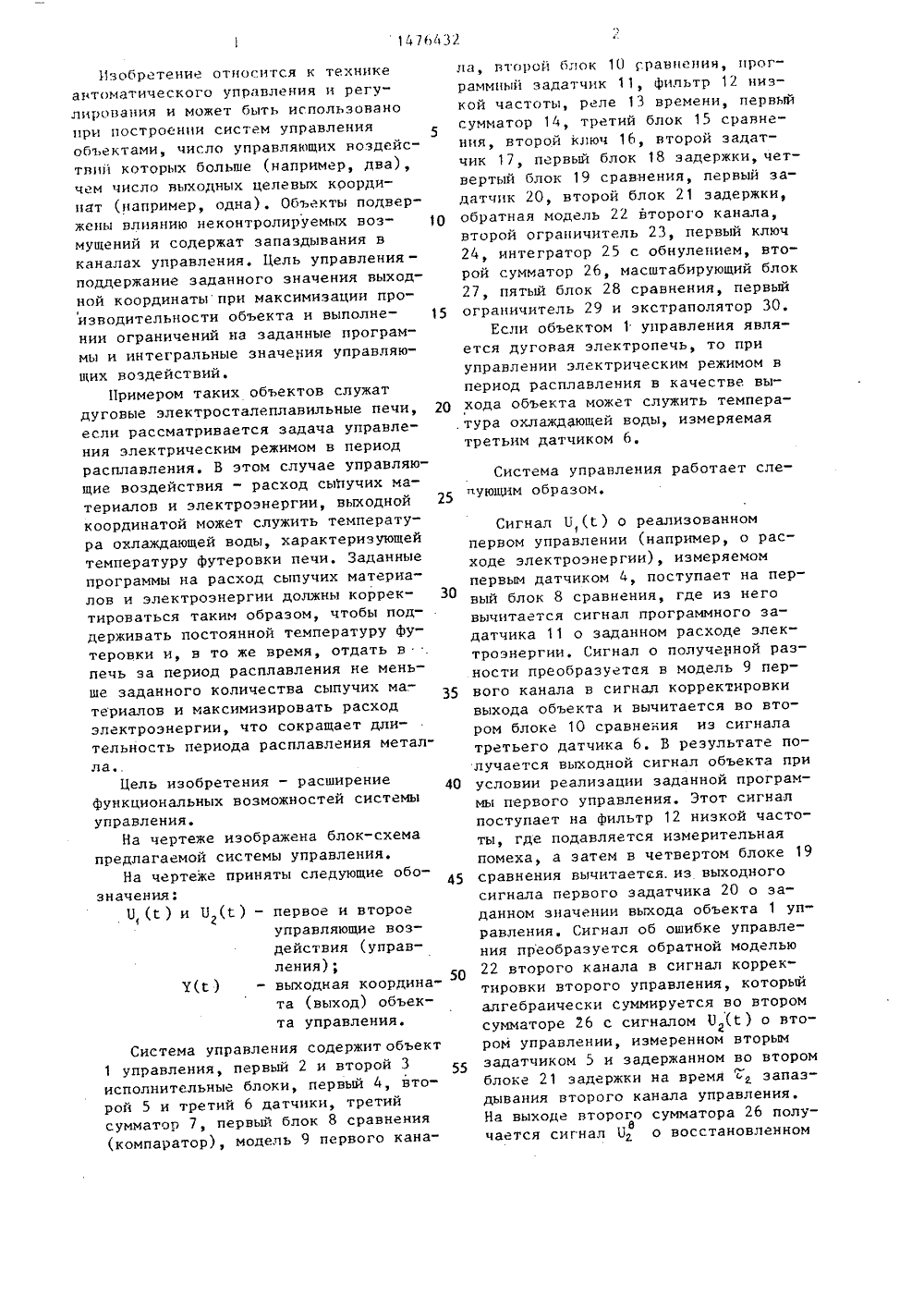
каМ.Рассаев, А.Ввриков ин, Поп ельство СССР 13/02, 1986,7 ойких ов ения выплавк ых электриче ва)ных систем упра стали в мощных дуг печах. Цель изобре расширении функцио тей системы регули ения состо зможно сче вани 4:ь ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ВТОРСКОМУ СВИДЕТЕЛЬСТВ(54) СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ СИЗБЪТОЧНЪМ ЧИСЛОМ УПРАВЛЯЮЦИХ ВОЗДЕЙСТВИЙ, НАПРИМЕР ДУГОВОЙ ЭЛЕКТРОПЕЧЬЮ бретение может быть исп ля построения автоматиз того, что выдерживаются интегральныезначения второго управления на заданном интервале времени, для чего служат реле 13 времени и задатчик 17, атакже интегратор 25 с об)улением,выходной сигнал которого об интегральных корректировках второго управления ограничивается ограничителем 23, реализуется заданная программа первого управления, котораяустанавливается программным задатчиком, Кроме того, максимизируетсяпроизводительность системы управления: так, второе управление рассчитывается при условии реализации программы первого управления, для чегоотклонения первого управления.отзаданной программы исключаются свыхода объекта управления с помощьюпервого 8 и второго 10 блоков сравнения и модели 9 первого канала. Совокупность блоков и связей системыуправления обеспечивает достижениепоставленной цели, 1 ил.автоматического управления и регулирования и может быть использованопри построении систем управленияобъектами, число управляющих воздействий которых больше (например, два),чем число выходных целевых координат (например, одна). Объекты подвержены влиянию неконтролируемых возмущений и содержат запаздывания вканалах управления, Цель управленияподдержание заданного значения выходной координатыпри максимизации производительности объекта и выголнении ограничений на заданные программы и интегральные значения управляющих воздействий.римером таких объектов служатдуговые электросталеплавильные печи,если рассматривается задача управления электрическим режимом в периодрасплавления. В этом случае управляющие воздействия " расход сыпучих материалов и электроэнергии, выходнойкоординатой может служить температура охлаждающей воды, характеризующейтемпературу футеровки печи. Заданныепрограммы на расход сыпучих материалов и электроэнергии должны корректироваться таким образом, чтобы поддерживать постоянной температуру футеровки и, в то же время, отдать впечь за период расплавления не меньше заданного количества сыпучих материалов и максимизировать расходэлектроэнергии, что сокращает длительность периода расплавления металла,Цель изобретения - расширениефункциональных возможностей системыуправления.На чертеже изображена блок-схемапредлагаемой системы управления.На чертеже приняты следующие обозначения:ц,(г.) и П (г.) - первое и второеуправляющие воздействия (управления);У(г.) - выходная координата (выход) объекта управления,5101520 25 Система управления содержит объект 1 управления, первый 2 и второй 3 исполнительные блоки, первый 4, второй 5 и третий 6 датчики, третий сумматор 7, первый блок 8 сравнения (компаратор), модель 9 первого канаИзобретение относится к технике 30 35 40 45 50 55 ла, второй блок 10 равнения, программный задатчик 11, фильтр 12 низкой частоты, реле 13 времени, первый сумматор 14, третий блок 15 сравнения, второй ключ 16, второй задатчик 17, первый блок 18 задержки, четвертый блок 19 сравнения, первый задатчик 20, второй блок 21 задержки, обратная модель 22 второго канала, второй ограничитель 23, первый ключ 24, интегратор 25 с обнулением, второй сумматор 26, масштабирующий блок 27, пятый блок 28 сравнения, первый ограничитель 29 и экстраполятор 30.Если объектом 1 управления является дуговая электропечь, то при управлении электрическим режимом в период расплавления в качестве выхода объекта может служить температура охлаждающей воды, измеряемаятретьим датчиком 6,Система управления работает следующим образом,Сигнал Б,(г.) о реализованном первом управлении (например, о расходе электроэнергии), измеряемом первым датчиком 4, поступает на первый блок 8 сравнения, где из него вычитается сигнал программного задатчика 11 о заданном расходе электроэнергии. Сигнал о получерной разности преобразуется в модель 9 первого канала в сигнал корректировки выхода объекта н вычитается во втором блоке 10 сравнения из сигнала третьего датчика 6. В результате получается выходной сигнал объекта при условии реализации заданной программы первого управления, Этот сигнал поступает на фильтр 12 низкой частоты, где подавляется измерительная помеха, а затем в четвертом блоке 19 сравнения вычитаетая.из выходного сигнала первого задатчика 20 о заданном значении выхода объекта 1 управленияСигнал об ошибке управления преобразуется обратной моделью 22 второго канала в сигнал корректировки второго управления, который алгебраически суммируется во втором сумматоре 26 с сигналом У (с ) о втогром управлении, измеренном вторым задатчиком 5 и задержанном во втором блоке 21 задержки на времязапаздывания второго канала управления. На выходе второго сумматора 26 полуечается сигнал 0 о восстановленном1 71 с злвплыллчм 1БтороГ об 1)азономуправленц, раный 1 гг)-г(г.- г ) + У. ) 15 де Б,р ) и Б . ) - выходной ивходной сигна лы ограничителя 29. л где Бг(1- ) - реализованное второе управление; 1 О У - обратная модель второго канала; заданное значение выхода объекта; У. ) скорректированное значение выхода объекта. Сигнал 1, (й- (г) экстраполируется на время ( экстраполятором 30 и подается на ограничитель 29 с ха-. рактеристикойБ (С) при 1.1 г(С) 13 И), =11 И), при 0 Цс 0 (с), О, при 0 ;) (О, л25 Р не 13 времени через заданные промежутки времени подает сигнал напервый 24 и второй 16 ключи, которыепо этому сигналу замыкаются. Сигнало величине заданного второго управления с выхода второго эадатчика 17поступает на третий блок 15 сравнения, где из него вычитается сигналоб интегральном значении оперативных корректировок второго управления,реализованных с предыдущего подключения второго эадатчика 17, Интегральные значения корректировок получаются на выходе интегратора 25 собнулением и поступают через замкнутый первый ключ 24 на первый ограничитель 23, который ограничивает величину интегральной корректировки дозначения, не превышающего заданнуюмассу порции материала со второгозадатчика 17, Обнуление интегратора25 с обнулением производится с задержкой, устанавливаемой с помощьюпервого. блока 18 задержки. Величинаэтой задержки выбирается такой, чтобы сигнал с интегратора 25 поступилна третий блок 15 сравнения, послечего и производится обнуление интегратора 25.Выходнойвычитается в ия из вхо 29, всигна езульт о вели 50 рого датчика держки подкл атора то, с о т ль гнал ограничителя 29ятом блоке 28 сравнео сигнала ограничителяте чего определяетсяине превышения зоны ограничения, которыи пересчитывается с помощью масштабирующего блока 27 в сигнал корректировки первого управления. Этот сигнал в третьем сумматоре 7 алгебраически суммируется с заданным сигналом первого управления, поступающим с программного задатчика 11, Сигнал о первом управлении с выхода третьего сумматора 7 поступает на реализацию в первый исполнительный блок 2,Требуемая программа на второе управление У(Т )(например, на массу и время отдачи порций сыпучих материалов) задается с помощью реле 13 времени и второго эадатчика 17. Сигнал об оперативных корректировках второго управления с выхода ограничителя 29 алгебраически суммируется в первом сумматоре 14 с сигналом о скорректированной заданной порцией материала и поступает для реализации во второй исполнительный блок 3. Формула и з о б р е т е Система управления объектом с избыточным числом управляющих воздействий, например дуговой электро- печью, содержащая экстраполятор, первый ограничитель, фильтр низкой частоты, первый сумматор, первый и второй блоки задержки, первый и второй датчики, первый исполнительный блок, три блока сравнения, последовательно включенные второй исполнительный блок, объект управления и третий датчик, последовательно включенные первый задатчик и четвертый блок сравнения, последовательно включенные обратная модель второго канала и второй сумматор, последовательно включенные пятый блок сравнения и масштабирующий блок, выход первого исполнительного блока соединен с первым входом объекта управления и входом первого датчика, выход второго исполнительного блока - с вторым входом объекта управления и входом втовыход второго блока за чен к второму входу сум и ч а ю щ а я с я тем,повьшения точности сис76432 Составитель А,ЛащевТехред М,Дидык Корректор В.Романенко Редактор А.Ревин Заказ 2153/47 Тираж 789 Подписное ВНИИНИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,101 5 14 темы, в нее введены третий сумматор, модель первого канала, программный задатчик, реле времени, последовательно включенные интегратор с обнулением, первый ключ и второй ограничитель, последовательно включенные второй задатчик и второй ключ, выход которого соединен через третий блок сравнения с первым входом первого сумматора, выход второго ограничителя подключен к вычитающему входу третьего блока сравнения, выход реле времени подключен к входу первого блока задержки, второму входу второго ключа и второму входу первого ключа, выход первого ограничителя соединен с вычитающим входом пятого блока сравнения, вторым входом первого сумматора и первым входом интегратора с обнулением, второй вход которого связан с выходом первого блока задержки, выход второго сумматора через экстраполятор соединенс входом первого ограничителя и суммирующим входом пятого блока сравнения, выход программного задатчикасоединен через третий сумматор свходом первого исполнительного блокаи через последовательно включенныепервый блок сравнения, модель первого канала, второй блок сравнена,фильтр низкой частоты и четвертыйблок сравнения - с входом обратноймодели второго канала, выход масштабирующего блока соединен с вторымвходом третьего сумматора, выходпервого датчика - с суммирующим входом первого блока сравнения, выходпервого сумматора - с входом второгоисполнительного блока, выход второго датчика - с входом второго блоказадержки, выход третьего датчика -с суммирующим входом второго блокасравнения.
СмотретьЗаявка
4236752, 28.04.1987
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ЧЕРМЕТАВТОМАТИКА"
СОЛОВЬЕВ ВИКТОР ИВАНОВИЧ, РАССАДИН ВАСИЛИЙ МИХАЙЛОВИЧ, МЫШЛЯЕВ ЛЕОНИД ПАВЛОВИЧ, АВДЕЕВ ВИТАЛИЙ ПАВЛОВИЧ, ПОПОВ АНАТОЛИЙ ВАСИЛЬЕВИЧ, МАРТЫНОВ РУДОЛЬФ НИКОЛАЕВИЧ, ГАВРИКОВ НИЛ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: воздействий, дуговой, избыточным, например, объектом, управляющих, числом, электропечью
Опубликовано: 30.04.1989
Код ссылки
<a href="https://patents.su/4-1476432-sistema-upravleniya-obektom-s-izbytochnym-chislom-upravlyayushhikh-vozdejjstvijj-naprimer-dugovojj-ehlektropechyu.html" target="_blank" rel="follow" title="База патентов СССР">Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью</a>
Блок сравнения березовского

Номер патента: 1464241
Опубликовано: 07.03.1989
Автор: Березовский
МПК: H02H 3/40
Метки: березовского, блок, сравнения
...токов13 - 14, Если ток 14 превышает ток 13, тозакрыт вентиль 6 и открыт вентиль 8, черезкоторый проходит ток обратной связи, равный разности токов 14 - 13.Первое назначение усилителя 11 состоитв том, чтобы ка его выходе было напря 0 жение, пропорциональное модулю разноститоков (14 - 13), т.е. должна быть величинаодного и гого же знака независимо от тогокакой из токов преобладает. Когда греобладает ток 14, то напряжение 1.15 ка резисторе 5 равно нулю, а отрицательное на 55 пряжение 1.17 на резисторе 7 передаетсячерез резистор 14 к через инвертирующийвход усилителя 11, вызывая на выводе 22зусилителя 11 положительное напряжение. Когда преобладает ток 13, то напряжение 117 равно нулю, а положительное напряжение 1.1, на резисторе 5...
Пневматический блок сравнения

Номер патента: 257874
Опубликовано: 01.01.1969
Автор: Потепалов
МПК: G06G 5/00
Метки: блок, пневматический, сравнения
...с атмосферой, а в глухой камере установлена пружина.На фиг. 1 изображен пневматический блок сравнения; на фиг. 2 - схема блока при выполнении узла ограничения в виде дросселя; 20 на фиг. 3 - схема блока при выполнении узла ограничения в виде соединения одномембранного элемента с дросселем; на фиг. 4 - узел ограничения в виде одномембранного элемента с обратным клапаном, 25Пневматический блок сравнения (фиг. 11 содержит входной одномембранный элемент 1, камеры которого соединены с входными каналами Р, и Р, а сопло через узел 2,ограничения и дроссель 3 - с атмосферой и с глухой 30 4. Проточная камера эле ссель б соединена с источ епосредственно с выхюдньтх257874 ние Р,м, до величины давления питания. Если Рг)Р 2, то мембрана элемента 1...
Реагирующий элемент для блоков сравнения органов релейной защиты

Номер патента: 970541
Опубликовано: 30.10.1982
Автор: Лысенко
МПК: H02H 3/38
Метки: блоков, защиты, органов, реагирующий, релейной, сравнения, элемент
...отсутствует выходной сигнал и коммутирующий5 ключ 3 закрыт. Конденсатор 8 разряжен и на вход преобразователя 10импульсов не подается сигнала.При наличии входного напряженияв тот интервал времени, когда егоположительное мгновенное значениепревышает опорное напряжение индикатора 1 уровня (Ор ), на объединенном выходе индикаторов появляется положительное напряжение заданного неизменного уровня. Конденсатор 8заряжается через резистор 5 и диод 7.Блок 4 управления не работает подвлиянием положительного напряженияна его входе и коммутируемый ключ 3остается закрыт,В тот интервал времени, когдаположительное мгновенное значениевходного напряжения ниже О , а от-;рицательное мгновенное значение входного напряжения остается ниже Оп,2,на выходе...
Устройство для автоматического управления процессом приготовления и подачи углеводородной шихты для полимеризации диеновых углеводородов и блок сравнения

Номер патента: 983670
Опубликовано: 23.12.1982
Авторы: Абрамзон, Гармашов, Гурари, Михеенкова
МПК: G05D 27/00
Метки: блок, диеновых, подачи, полимеризации, приготовления, процессом, сравнения, углеводородной, углеводородов, шихты
...задатчика 9 расходамОНОмера, прямой к инверсный ныхОдывторого триггера 42 соедццэнь 1 соответственно с у-, ранляющимц входамиключей 35 и 36 входы которых саедкнены и являются пятым входам блокасравнения, который соединен с выходом второго регулятора 1 концентрации мономера в шцхте, а выходы ключей 35 ц 36 соэдпнены соотне 1 стненно с пернымц вхадамк третьего 39 цчетвертого 40 элементов сравнения,вторые входы которых соединены к являются шестым входам блока сравнения,который соединен с входом задатчкка22 расхода вознратного растворителя, 5 Оиннерсный выход третьего триггера 43является выходом блока сравнения цсоединен с нхадами первого 1 и второго 2 ключей ц входом второго элемента ИЛИ 28. 55Основным элементам устройстваавтоматического...
Идентификатор параметров динамической системы второго порядка
Номер патента: 1038922
Опубликовано: 30.08.1983
Авторы: Джалолов, Тимошенков, Чекалин
МПК: G05B 13/02
Метки: второго, динамической, идентификатор, параметров, порядка, системы
...яв ляется невысокая точность из-за плохой обусловленности системы алгебраических уравнений в Фиксированный момент времени.Наиболее близким к предлагаемому20 по техчической сущности является уст" ройство для определения постоянной времени нелинейных инерционных объектов, принцип действия которого основан на периодическом возбуждении пе реходного процесса на выходе объекта и обработке входного и выходного сигналов блоками формирования сигналов, пропорциональных коэффициентам алгеб" раического уравнения относительно не" З 0 известного параметра, Устройство содержит генератор пробного сигнала, два блока Формирования коэффициентов БФК), четыре ключа, формирователь управляющего воздействия, регистри 35 рующее устройство, инверторы, интегро....
Предыдущий патент: Следящая система
Следующий патент: Система автоматического регулирования
Случайный патент: Изложница для отливки слитков