Способ определения коэффициентов передаточных функций систем регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 696416
Авторы: Коломойцева, Липец, Соседка
Текст
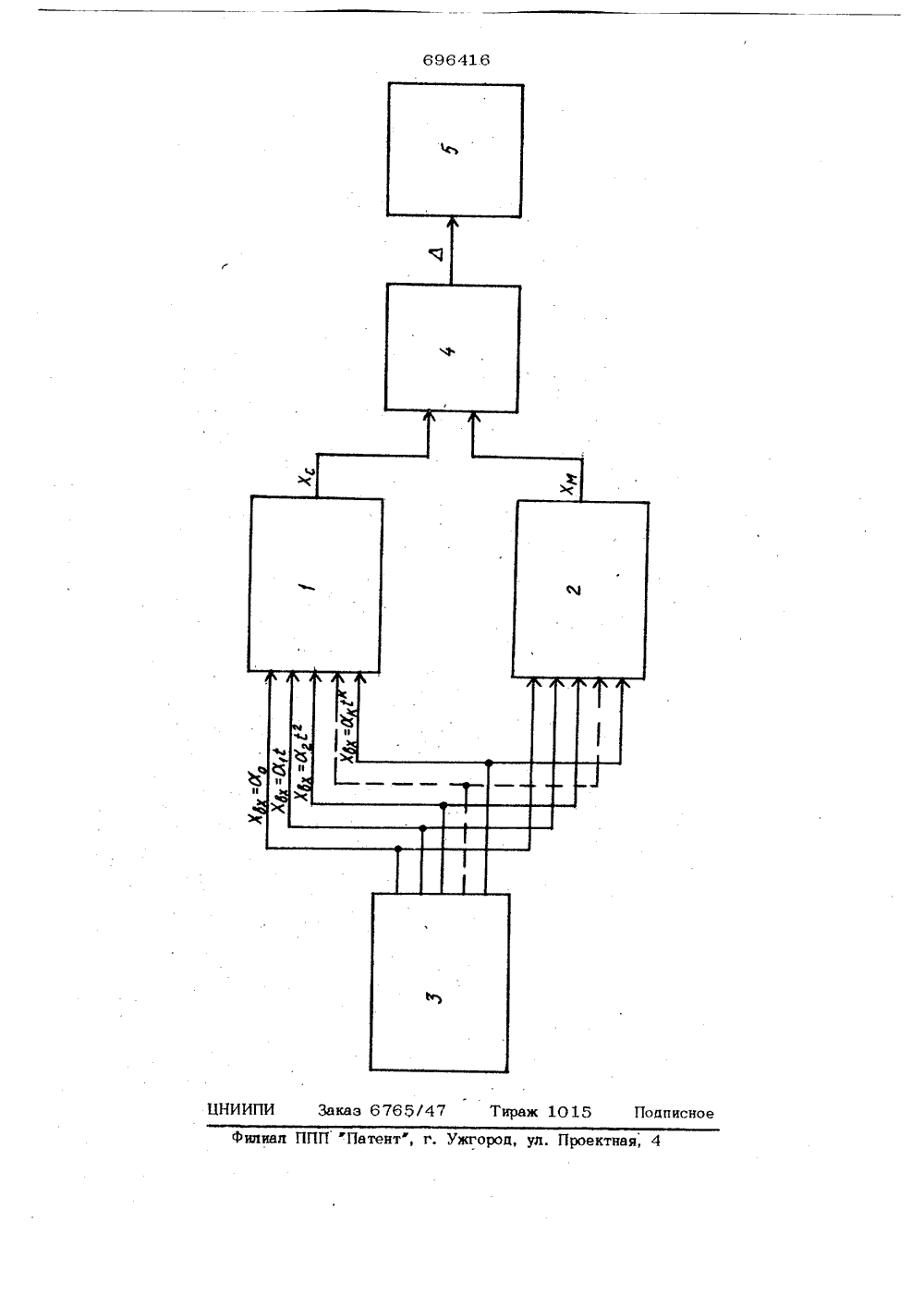
ОП ИСАИЙЕИЗОБРЕТЕН ЙЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспубттии(61) Дополнительное к авт. свид 22)Заявлено 31,01 75 (21) 2101478/18 вки М 51)М. Кл, б 05 В 23 с присо еиием з есударстееннын неиетет СССР е делам нэобретенне н етнрытнйПриоритетОпубликовано 0 1.79. Бюллетень Ле 4 53) УДК 62. ,50(088.8 ата опублик ания описания 06.11.7 2) Авторы изобретения. Липеп и Л. ф. Коломойпева В ос Заявитель непропетровский Ордена Трудового Красного Знамени горный институт им. Артема 54) СПОСОБ ОПРЕДЕЛЕНИЯ КОЭффИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ СИСТЕМ РЕГУЛИРОВАНИЯ ощади каким и дложенному изоб определения к ушности к пявляется снос ши Изобретение относится к области автоматики, а именно, к измерительной технике и автоматическому регулированию и может быть использовано при наладке различных промышленных систем автоматического регулирования,Известен способ определения коэффи- циентов передаточных функций, основанный на том, что на вход исследуемого звена подают короткий пульс, а затем определяют плошадь (интеграл), ограниченную выходным сигналом, Постоянная времени определяется по величине этой1 Недостатком известного способа яв ляется низкая точность в определении коэффициентов передаточных функций при второй и более высоких производных.При появлении случайных ошибок в начал вычисления (например, ошибка в вычислении первого интеграла) последняя будет накапливаться при вычислении последуюх интегралов. Известен также способ определениякоэффициентов передаточных функций, . который заключается в том, что тестовойсигнал пропускают последовательно через синтезатор и исследуемую систему5(первый квнал) и через синтезатор (второй канал) 2.Недостатком известного способа является большая длительность процесса поиска коэффициентов передаточной функции10исследуемой системыИзвестен также способ определениякоэффициентов передаточных функций систем регулирования, при котором тестовыйсигнал одновременно подают на входисследуемой системы и модели 3,Недостатком известного способа является то, что коэффициенты передаточныхфункций при высоких степенях производных будут определяться со значительнымиошибками,Наиболее бл о технической69641 тов передаточных функций систем регулирования путем подачи на вход системырегулирования и ее модели время-степенных пробных сигналов и подстройки модели до момента компенсации выходногосигнала системы регулирования сигналоммодели, 4.Однако этот способ имеет следующиенедос татки;невозможность определить передаточную 0функцию быстродействующих систем; большие ошибки в определении коэффициентовпередаточных функций; значительный объемвычислений при определении коэффициентовпередаточных функций; невозможность. определения коэффициентов при действиипромышленных помех,Обобщая эти недостатки можно сказать, что известный способ определениякоэффициентов передаточных функций имеет низкую точность.Бель изобретения - увеличение точности способа.Поставленная цель достигается тем,25что время-степенные пробные сигналыформируют из последовательности одиночных сигналов.На чертеже изображена функциональнаясхема устройства, реализующего предложенный способ.30Схема содержит исследуемую систему 1,модель 2, генератор время-степенныхпробных сигналов 3, блок сравнения 4,измеритель разности 5. В качестве моде 35ли 2 могут быть использованы элементыаналоговой вычислительной машины. В качестве генератора время-степенных пробных сигналов 3 можно использовать последовательно соединенные интеграторы,Со входа первого интегратора нй входсистемы 1 и модели 2 подается ступенчатое воздействие (канал 1), с выходапервого интегратора на вход системы 1и модели 2 подается линейно.-растущийсигнал Х = с(,1 (канал 2), с выходавторого ййтегратора на вход системы 1и модели 2 подается квадратно-растущийсигнал Х - д. + (канал 3). Последовательное включение интеграторов приводит ктому, чтостепень выходного сигналакаждого последующего интегратора увеличивается на единицу, Поэтому выходнойсигнал -го интегратора будет равенХщ=сД. Генератор время-степенныхкрядов 3 сконструирован таким образом,что на вход системы 1 и модели 2 мо-,жет подаваться любой иэ полученных вэтом генераторе сигналов, Выходные 4сигналы исследуемой системы 1 и модели. подают на блок сравнения 4, В качес 1 ве блока сравнения 4 может быть использован операционный усилитель, работающий в режиме масштабного преобразователя. Выходной сигнал блока сравненияравен разности выходных сигналов Хс имодели Х,т.е. гъ = Х, - Х. Сигнал разностиа, подают на блок измерителя разности 5,Измерителем разности 5 может служитьоперационый усилитель, работающий в режиме интегрирования, Для определениявеличины Ь необходимо интегратор блока,5 включить после прекращения в системесвободных колебаний; а затем результатинтегрирования разделить на время интегрирования.Предположим, что передаточная функция исследуемой системы имеет вид:ф (Р)- Кср а р" фа р " +о р+акс к)с" 1 с осДля определения неизвестных коэффициентов передаточной функции исследуемойсистемы 1 поступают следующим образом.Подают на вход системы 1 и модели 2ступенчатый сигнал. После прекращенийсвободных колебаний в исследуемой системе изменяют коэффициент при свободномслене модели 2 до тех пор, пока интегсрагор блока 5 не остановится, Это значит, что коэффипиент при свободном члене системыб равен коэффициенту приоссвободном члене модели а ,Затем. йодают на вход системы и модели линейно растущий сигнал Хх= о.11,Коэффициенты О при первой производнойопределяют по формуле2.1 ОСа 1 с ссгде Ь - разность выходного сигнала системы и модели при подаче Х в,= сС 1 Ы, - коэффициент при линейно растущем сигнале, Если этот коэффициент будет велик, то выходная величина системы раньше достигнет своего предельного значении, чем затухающие в системе сво бодные колебания. Тогда эксперимент надо повгорить, предварительно уменьшив величину а(, Когда в системе затухнут свободные колебания все производные выше первой обратятся в нуль и расчетная формула для вычисления Ок примет простой вид.После определения значения коэффициента с 3 с приступают к определению коэффициента с 1 с . На вход системы и модели подают Хх= сА 5 6, После прекращениясвободных колебаний формула для вычисления с 1 имеет вид:д, г2 с 2 сС2где Ь- разность выходного сигнала системы и модели при подаче на их вход воздействий Х= Д.я,Подавая на вход системы все более сложный сигнал из последовательности время-степенного ряда можно определить все неизвестные коэффициенты исследуемой системыосгК К. сСкгде Ьк - разность выходного сигналасистемы и модели при подачекна их вход воздействий ХХ =дф;д, - коэффициент при соответствующемКсигнале из время-степенного ряда.Описание предложенного способа показывает, что его реализация не требует сложной аппаратуры, а коэффициенты передаточной функции определяются приблизительно с одинаковой ошибкой. Поэтому способ может найти широкое применение при наладке промышленных систем регулирования. С помощью устройств, реализующих этот способ, удается быстро определить передаточные функции промышленных систем, а затем за короткий срок наладки добиться в этих системах оптималенного режима функционирования,Формула изобретения 5Способ определения коэффициентов передаточных функпий систем управления,путем подачи на вход системы регулирования и ее модели время-степенных проб О ных сигналов и подстройки модели домомента компенсации выходного сигналасистемы регулирования сигналом модели,о т л и ч а ю щ и й с я тем, что, с цельюувеличения точности способа, в нем время степенные пробные сигналы формируютиз последовательности одиночных сигналов.Источники информации,принятые во внимание при экспертизе20 1. Пегтяренко П. МКоваленко В, П.Определение характеристик звеньев системавтоматического регулирования, Энергия, М., 1973, с. 76-81.2. Оршлнцев В, М, Автоматизация ма 25 тематического описания объектов управления, Машинострение, М., 1969, с. 91105,3. Власов-Власюк О. Б. Экспериментальные методы в автоматике, "Машиз,О построением, М., 1969, с. 178-184.4, Авторское свидетельство СССР208792, кл, (3 05 В 23/02, 1966,696416 ороа ул Проектная и пи иал П Заказ 6765/47 атент", г ж 1015 писное
СмотретьЗаявка
2101478, 31.01.1975
ДНЕПРОПЕТРОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ ИМ. АРТЕМА
СОСЕДКА ВИЛИЙ ЛУКИЧ, ЛИПЕЦ СЕМЕН ЯКОВЛЕВИЧ, КОЛОМОЙЦЕВА ЛЮДМИЛА ФЕДОРОВНА
МПК / Метки
МПК: G05B 23/00
Метки: коэффициентов, передаточных, систем, функций
Опубликовано: 05.11.1979
Код ссылки
<a href="https://patents.su/4-696416-sposob-opredeleniya-koehfficientov-peredatochnykh-funkcijj-sistem-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения коэффициентов передаточных функций систем регулирования</a>
Электронно-оптическая система входа электровакуумного прибора

Номер патента: 246692
Опубликовано: 01.01.1969
Автор: Далиненко
МПК: H01J 29/56
Метки: входа, прибора, электровакуумного, электронно-оптическая
...торец фокусирующего электрода помещен в пространство, охваченное верхней частью цилиндрического ускоряющего электрода.Достоинство предложенной ЭОС состоит в 25 том, что в ней обеспечена высокая степень фокусировки электронного изображения в плоскости вырезывающего отверстия и устранено смещение оси электронно-оптического изображения. 30 На чертеже изображена ЭОС входа электро- вакуумного прибора предложенной конструкции, содержащая фотокатод 1, фокусирующиц электрод 2 на металлическом кольце 3, вварепном в баллон, ускоряющий электрод 4 в виде проводящего покрытия на внутренней поверхности баллона и контактирующий с ним электрод 5 с вырезывающим отверстием, в которой расстояние от поверхности фотокатода до нижнего торца фокусирующего...
Устройство для контроля микропроцессорной системы

Номер патента: 1460722
Опубликовано: 23.02.1989
Авторы: Альтерман, Комаров, Шубин
МПК: G06F 11/30
Метки: микропроцессорной, системы
...фактического и ожидаемого количества машинных циклов при реализации текущей команды микропроцессора используется одноразрядный выход разрешения записи данных (выход 3) блока 8 памяти. Значение этого разряда равно "1" лишь в ячейках блока 8 памяти, соответствующих последнему машинному циклу для каждой команды.Как видно из табл.1, например, для команды НОР сигнал на выходе разрешения записи данных (выход 3) блока 8 памяти равен логической "1" в первой ячейке группы ячеек, объе1460 722 8щая пропущенному машинному циклу команды. Появление неожидаемого сигнала М 1 на шине управления МПС обнаруживается схемой 10 сравнения, что приводит к появлению единичного сигнала на выходе 5 ошибки устройства.Для обнаружения некорректных ситуаций...
Система полунатурного моделирования динамических систем
Номер патента: 1121681
Опубликовано: 30.10.1984
Авторы: Белюнов, Лукьянова, Овчинников, Пупков
МПК: G06G 7/48
Метки: динамических, моделирования, полунатурного, систем
...аппаратуры, кинематически связанной с динамическим стендом., и решающий блок, первый выход которого подключен к .входу аналогового генератора шума, авторой выход является выходом реаль" ного модуля, введены генератор пробньм воздействий, блок оперативной памяти, блок памяти, блок управления системы, арифметическое уст ройство и группа реальных модулей по числу моделируемых подсистем реальной аппаратуры, а каждый реальный модуль содержит первый и второй аналого-цифровые преобразователи, 10 входы которых соединены соответственно с выходом аналогового генератора шума и выходом исследуемойреальной аппаратуры, а выходы подключены к соответствующим входам 15 решающего блока, выход каждого реального модуля подключен к соответствующим...
Устройство для контроля оптической передаточной функции оптических систем

Номер патента: 1589099
Опубликовано: 30.08.1990
Авторы: Галибин, Дубиновский, Ерохов, Тарасенко
МПК: G01M 11/02
Метки: оптических, оптической, передаточной, систем, функции
...частотывращения электродвигателя 9, причемтаким образом, чтобы мгновенная скоРость перемещения иэображения растрапо анализирующей диафрагме остава"лась постоянной и равной тому значению, что и при отсутствии вибраций.Частота модуляции сигнала на выходеприемника излучения остается постоян 5ной и равной начальному значениюТаким образом, благодаря компенсациивибраций основания исключается дополнительная погрешность измерения.Режим шагового движения диска ну"жен для юстировки стенда и его зада"чей является фиксация диска в любомпроизвольном угловом положении. Работа устройства в этом режиме происходит следующим образом. Чтобы оста.15новить тест-объект 2 в заданном положении, первоначально уменьшают частоту вращения электродвигателя 9...
Устройство для измерения многомерных передаточных функций нелинейныых систем

Номер патента: 1626199
Опубликовано: 07.02.1991
Авторы: Ивлев, Матвеев, Снурницин, Трушин
МПК: G01R 27/28
Метки: многомерных, нелинейныых, передаточных, систем, функций
...составлял тей, обусловленная начальными Фазами частотных компонентов входного сигнала Ф, Ю 11.)Отклик на выходе безынерционного) нелинейного элемента 5 определяется теми же формулами, в которы.; все сечения многомерных передаточных функций являются действительными коэффициентами, поэтому Фазы комплексных составляющих на выходе элемента 5 определяются только начальными Фазами компонент испытательного сигнала на его входе и равнЫ (.10 (шо).Многочастотный с)тектр с выхода безынерционного нелинейного элемента 5 поступает на вход фильтра 3, на .- к,к,)а ЙВ(Оф С Е Оесли опорное колебание умножителя 6поступает с синфазного канала следящего фильтра 3, иК 1,а, (а, ) ),ВЫ)(90 управляющий цифровой вход которого подается цифровой код,...
Предыдущий патент: Устройство для регулирования скорости привода
Следующий патент: Устройство для проверки монтажа электронных устройств
Случайный патент: Пресс для непрерывного продольного сращивания заготовок