Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 494725
Авторы: Гумен, Калининская




Текст
1 ш 494725 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических) Дополнительное к ав д-ву 01.74 (21) 1993593/18-24 Кл. б 05 Ь 11 22) Заявлено ием заявкирисое и Государственный комите Совета Министров ССС) Г 1 риор етень45 53) УДК 621,3(088.8 публиковано 05.12,75. Бюата опубликования опис елам изобретений ткрыти ия 02.03,7 2) Авторы изобретения ф. Гумен и Т. В. Калининска(54) СЛЕДЯЩАЯ СИСТЕМ Изобретение может быть использовано как в наземных дискретных системах автоматического управления, так и в системах управления летательных аппаратов, а также при проектировании следящих систем автоматизированных устройств управления и кибернетики, к которым предъявляются повышенные требования по точности и быстродействию.Известны следящие системы с щаговыми двигателями, содержащие последовательно соединенные устройство сравнения, усилитель, пороговое устройство, первый выход которого через первые дифференциатор и элемент И, а второй через вторые дифференциатор и элемент И соединены с соответствующими входами коммутатора, соединенного с обмотками шагового двигателя, механически связанного с датчиком шагов и через исполнительный механизм с устройством сравнения, ключ, триггер и линию задержки,Однако такие системы не позволяют изменять скорость отработки рассогласования пропорционально величине ошибки,С целью повышения плавности регулирования в предлагаемую систему введены формирователь импульса и элемент ИЛИ, первый вход которого соединен со входом триггера и выходом датчика шагов, второй - с другим входом триггера, входом линии задержки и с выходом формирователя импульсов, вход которого подключен к выходу усилителя черезключ, управляющий вход которого соединенс выходом триггера. Выход линии задержкисоединен с третьим входом элемента сИЛИ,5 выход которого соединен с другими входамиэлементов И,На фиг. 1 представлена функциональнаясхема описываемой следящей системы; нафиг. 2 - схема расстановки во времени управ 10 ляющих импульсов ШД и угловые характеристики синхронизирующего момента четырехфазного двигателя при отработке первых шагов.Следящая система состоит из сравнивающе 15 го устройства 1, на вход которого поступаетвходное воздействие д, где сравнивается с сигналом главной обратной связи у и в виде сигнала ошибки х через усилитель 2 поступаетна вход порогового устройства 3, которое20 представляет собой двухпозиционное электронное реле с зоной нечувствительности.К каждому выходу порогового устройства 3попарно подключены входы дифференциаторов4, 5 и логических элементов ссИ 6, 7. Выходы25 этих пар перекрестно подключены на входылогических элементов ИЛИ 8 и 9, которыеподключены соответственно на входы впереди ссназад коммутатора 10. К выходам коммутатора подключены обмотки управления ша30 гового двигателя 11 (ШД). ШД 11 через ре5 10 15 20 25 30 35 40 45 50 55 00 65 дуктор (в общем случае) связан с исполнительным механизмом 12, включающим в себя датчик регулируемой величины (главная обратная связь на чертеже показана пунктиром). На валу ШД 11 установлен импульсный датчик шагов 13. Вторые входы элементов И 6 и 7 подключены к выходу элемента ИЛИ 14, один вход которого соединен с выходом датчика шагов 13, второй - с выходом линии задержки 15, а третий - с входом этой линии задержки, к которому через ключ 16 и формирователь импульса 17 подключен выход усилителя 2 и один из входов триггера 18, второй вход которого соединен с первым входом элемента ИЛИ 14,Формирователь импульса 17 представляет собой мультивибратор с регулируемой временной задержкой на выдачу импульса, регулируемой сигналом рассогласования, который подается на вход формирователя 17 через ключ 16, Период замыкания ключа 16 задается триггером 18.Устройство работает следующим образом.При сигнале рассогласования, превышающем значение зоны нечувствительности порогового устройства 3 на одном из выходов последнего в зависимости от знака рассогласования появляется потенциал, который подается на соответствующий элемент И 6 (или 7) и дифференцирующую цепь 5 (или 4). В итого через элемент ИЛИ 8 (или 9) на вход вперед 19 (или назад 20) коммутатора 10 поступает импульс (например, импульс 1), как показано на фиг. 2 при работе двигателя вперед, обмотки двигателя 11 переключаются, ротор попадает в ускоряющее поле (характеристика синхронизирующего момента а на фиг, 2) и начинает двигаться к новой точке устойчивого равновесия. В момент времени, соответствующий отработке ротором ШД половины шага, датчик шагов 13 вырабатывает импульс, который через элементы 14, 7 и 9, или 14, 6 и 8 поступает на переключение обмоток статора ШД в положение, соответствующее торможению ротора (фиг. 2 импульс 11 и характеристика д), Одновременно импульс с датчика шагов 13 поступает на один из входов триггера 18, который срабатывает и устанавливается в положение, соответствующее включенному состоянию ключа 16. Сигнал рассогласования х подается на вход формирователя 17. Через время, определяемое величиной сигнала рассогласования, на выходе формирователя 17 появляется импульс. Временная задержка импульса с формирователя 17 определяет длительность торможения рото. ра ШД, Время торможения ротора обратно пропорционально величине рассогласования.Импульс с выхода формирователя 17 поступает на второй вход триггера 18, перебрасывает его, и ключ 16 размыкается. Тем самым на одном шаге двигателя обеспечивается выдача только одного импульса с формирователя 17. Одновременно с этим сигнал с формирователя 17 приходит как непосредственно,так и через линию задержки 15 на элемент ИЛИ 14, Длительность задержки линии 15 выбрана на много меньшей минимального периода рабочей частоты двигателя. Таким образом, на коммутатор поступают два импульса, следующие один за другим, что сдвигает угловую характеристику синхронизирующсго момента на два такта (фиг, 2 импульсы 1 П, 1 Ч и кривая в). В итоге ротор попадает в ускоряющее поле, благодаря чему отрабатывается до конца первый шаг, и начинается отработка второго шага. В момент отработки половины второго шага очередной импульс, возникающий па датчике 13, формирует серию из трех импульсов (фиг. 2 импульсы Ъ, И и И 1), обеспечивающих торможение ротора и дальнейший его разгон. На последующих шагах система работает аналогично.Время подтормаживания на шаге определяется величиной рассогласования. Если задающее воздействие изменяется с постоянной скоростью, то система, имея главную отрицательную обратную связь, производит отработку входного воздействия с той же установившейся скоростью, При уменьшении скорости вход. ного сигнала время торможения увеличивается, и скорость двигателя снижается, При увеличении скорости входного сигнала рассогласование увеличивается и время торможения соответственно уменьшается,При значительных рассогласованиях время торможения двигателя уменьшается практически до нуля и двигатель переходит в режим бесконтактной машины постоянного тока, т. е. вращается с максимальной рабочей частотой, а прохождение пачки из трех импульсов по каналу коммутатора назад соответствует прохождению одного импульса по каналу вперед.В конечном итоге скорость определяется как функция энергии, пропорциональной разности площадей, ограниченных кривой синхронизирующего момента для разгона и торможения (фиг, 2,а). При этом диапазон скорости вращения двигателя изменяется в широких пределах, а именно, начиная от сверхнизких частот, когда площади, определяющие энергию разгона и торможения, мало отличаются одна от другой, и кончая максимальной рабочей скоростью двигателя, когда энергия торможения практически равна нулю. Если сигнал рассогласования очень мал, то двигатель работает в режиме единичных шагов, и управляющие импульсы поступают только от дифференциаторов 4 и 5.Благодаря подтормаживанию на каждом шаге путем смещения синхронизирующего момента при определенных положениях ротора разностная энергия, вводимая в систему шагового привода, расходуется на полезную работу, не создавая при этом избытка энергии, характерного для разомкнутых систем, и идущего на колебательные движения ротора, чтоособенно опасно на резонансных частотах, таккак может привести к нежелательным автоколебаниям в системе,Формула изобретенияСледящая система, содержащая последовательно соединенные устройство сравнения, усилитель, пороговое устройство, первый выход которого через первый дифференциатор и элемент И, а второй выход через вторые дифференциатор и элемент И соединены с соответствующими входами коммутатора, соединенного с обмотками шагового двигателя, механически соединенного с датчиком шагов и через исполнительный механизм с устройством сравнения, ключ, триггер и линию задержки, о т л и ч а ю щ а я с я тем, что, с целью повышения плавности регулирования, система со держит формирователь импульса и элементИЛИ, первый вход которого соединен со входом триггера и выходом датчика шагов, второй - с другим входом триггера, входом линии задержки и с выходом формирователя 10 импульсов, вход которого подключен к выходу усилителя через ключ, управляющий вход которого соединен с выходом триггера, выход линии задержки соединен с третьим входом элемента ИЛИ, выход которого соединен с 15 другими входами элементов И.494725 Оси лрюмронс тСоставитель В. ГуменРедактор Л, Утехина Техред Т. Курилко Корректор Т. фисен аказ 219/17ЦНИИ ПодписиСССР ипография, пр. Сапунова,Изд.1501 Государственного к по делам изобр Москва, Ж, Ра Тираж 869митета Совета Министтений и открытийушская наб., д. 4/5
СмотретьЗаявка
1993593, 28.01.1974
ПРЕДПРИЯТИЕ ПЯ Р-6794
ГУМЕН ВАЛЕРИЙ ФЕДОРОВИЧ, КАЛИНИНСКАЯ ТАТЬЯНА ВАСИЛЬЕВНА
МПК / Метки
МПК: G05B 11/14
Метки: следящая
Опубликовано: 05.12.1975
Код ссылки
<a href="https://patents.su/4-494725-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Устройство для формирования импульсов синхронизации при воспроизведении с носителя магнитной записи

Номер патента: 898498
Опубликовано: 15.01.1982
Авторы: Орлович, Фомкин, Чехлай, Чуманов
МПК: G11B 5/09
Метки: воспроизведении, записи, импульсов, магнитной, носителя, синхронизации, формирования
...1 О 1 шинн 1 воспроизведенного подключена также по входу мплитудного дискриминатоПредложенное устройство в процессе воспроизведения с носителя магнитной записи производит формирование импульсов синхронизации, которые он выделяет из воспроизведенного сигнала. В случае выпадения воспроизведенного сигнала обеспечивает формирование импульсов 1воспроизведения, частота следования которых равна его частоте до начала этого выпадения,Использование изобретения позволяет в значительной степени уменьшить погрешность формирования импульсов синхронизации при воспроизведении с носителя мамагнитной записи. формула изобретенияУстройство содержит входную шину 1 воспроизведенного сигнала, подключенную . ко входу демодулятора 2, и генератора 3 импульсов,...
Многоканальный резервированный формирователь тактовых импульсов

Номер патента: 1053340
Опубликовано: 07.11.1983
Автор: Краснокутский
МПК: G06F 11/20, H03K 3/011, H05K 10/00
Метки: импульсов, многоканальный, резервированный, тактовых, формирователь
...в любом изканалов, приводящих к.увеличению час-тоты сигналов на выходе делителячастоты,Поставленная цель достигается тем, что в многоканальный резервированный формирователь тактовых импульсов, содержащий в каждом канале задающий генератор, подключенный ко входу делителя частоты, первый формирователь одиночного им.Пульса, выход которого соединен с выходом канала и с входом установки в ноль делителя частоты, а вход .с выходом и -входового элементаИЛИ, каждый вход которого подключен к соответствующему выходу импульсного трансформатора во всехП каналах, в каждый его каналвведены элементы И, элемент НЕ ивторой формирователь одиночногоимпульса, вход которого подключенк выходу первого формирователя0 данного канала, а выход через элемент НЕ - к...
Формирователь строб-импульса и импульсных последовательностей
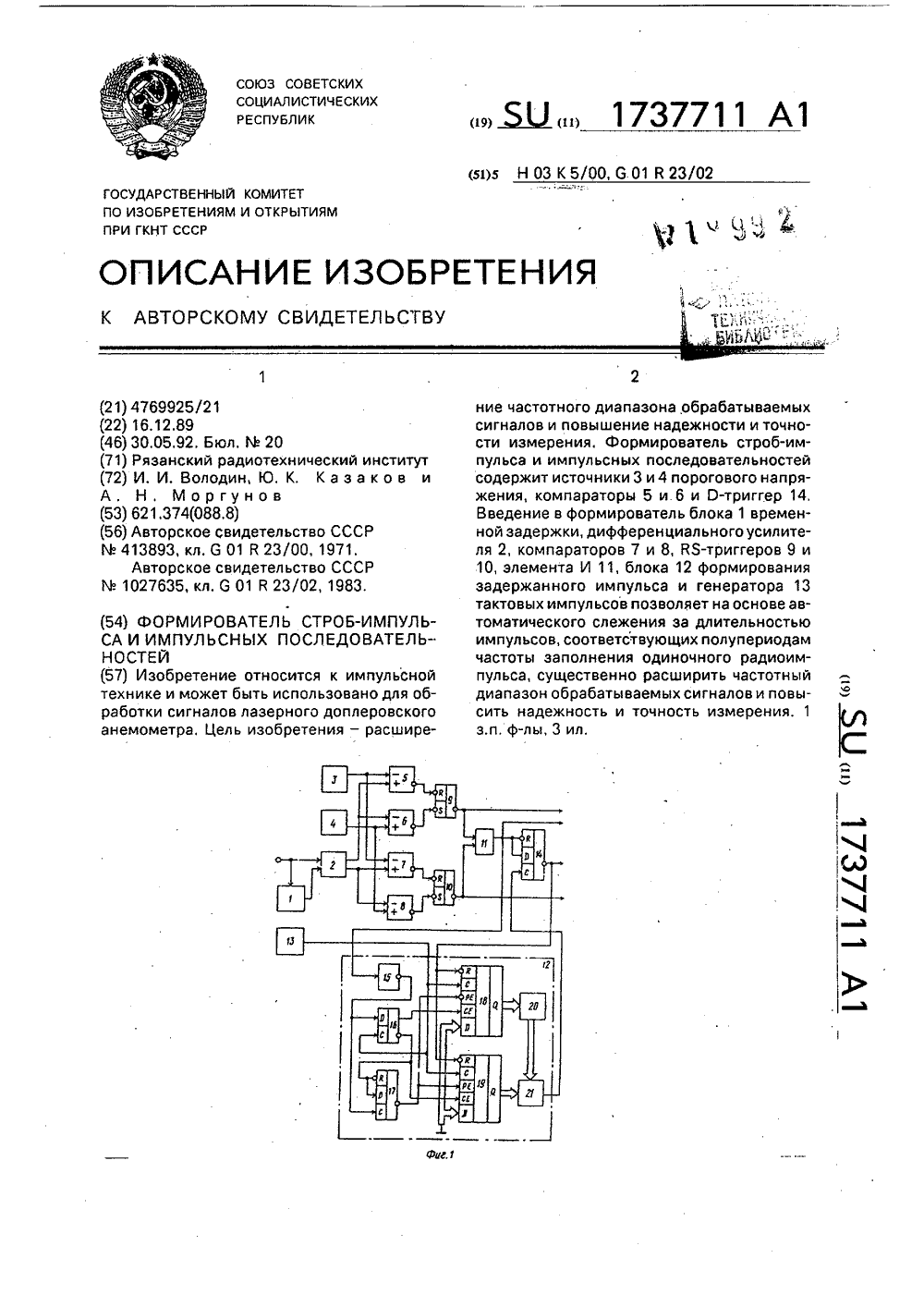
Номер патента: 1737711
Опубликовано: 30.05.1992
Авторы: Володин, Казаков, Моргунов
МПК: G01R 23/02, H03K 5/00
Метки: импульсных, последовательностей, строб-импульса, формирователь
...входу запуск О-триггера 14 (фиг.2 м, За), срыв которого осуществляется по второму входу задержанным импульсом с выхода блока 12 (фиг, 2 н, Зк) при наличии на первом входе О-триггера сигнала высокого уровня.Блок 12 формирования задержанного импульса работает следующим образом.На первый, второй и третий входы блока 12 поступают импульсы инвертированной последовательности с вь хода элемента И 11 (фиг, Зб), тактовые импульсы - с выхода генератора 13 (фиг, Зг) и строб-импульс - с выхода Р-триггера 14 (фиг, За). При появле 101520 когда на входах разрешения счета присутствуют сигналы низкого уровня, первый 18 и второй 19 счетчики находятся в режиме хранения, Кроме того, последовательность импульсов с второго выхода первого О-триггера 16 (фиг,...
Синхронизируемый формирователь квантующих импульсов для модема телефонного канала с импульснокодовой модуляцией

Номер патента: 573894
Опубликовано: 25.09.1977
МПК: H04J 13/04
Метки: импульснокодовой, импульсов, канала, квантующих, модема, модуляцией, синхронизируемый, телефонного, формирователь
...подключен к входу блока управления, а выход Форсирующего ключа подключен к общей точке соединения токозадающего резистора н 90 изолирующего диода блока управления.Ба чертеже дана 11 Р 111 дн 111 аз 1:на яэл 8 ктрическая схема поедлаГаемого фоРмирователя.Си нхрони зи 1 зуемжй формиров а т елзВ г,.1ТуЮщих ИМПУЛЬСОВ ДЛЯ МОДЕМа ТЕЛЕозЗН .СГО Кандгда С ИМПУЛЬСНО"КОДОВОЙ 1 ЗОДЗЛЯ"Цией содерйит блок 1 упРав ЧР 11 иг 1, В 11ход которого подключен к Выходу эзз 11терного повторителя 2, и реза 11 ац;:1 Ь 1.,Ь С "Кснтур 3, ПОДКЛЮЧЕННЫЙ К В 1 ХгГД;.ублока 4 линейной обратной свззц, злекТРОННЫЙ КЛЮЧ 5 г СИЗ 5 З 1 ЕТР 11 РУЮ 11 ИН 1.аскаДб и Вьткеднсй (1)ОрМ 11 ООВаФ. - . 7 З 1 гЗг ". ггЗр 8 эонансньй 4 С коцтЗр 3 че 13 раззТОР 8 СМЕЩЕНИЯ...
Многоканальный формирователь одиночных импульсов

Номер патента: 1164870
Опубликовано: 30.06.1985
Авторы: Лабичев, Матюшанов, Полянский
МПК: H03K 5/01
Метки: импульсов, многоканальный, одиночных, формирователь
...подключены к входам многонходового элемента И, выход которого соединен с первым входом триггера, второй вход которого подключен к шине синхроимпульсов, при этом выход элемента И-НЕ соединен с единичным входом счетного триггера, единичный выход которого подключен к другому входу элемента И, выход которого соединен также со вторым входом двухвходового элемента ИЛИ.На фиг. 1 представлена функциональная схема устройства; на фиг.2- временные диаграммы его работы.Многоканальный формирователь одиночных импульсов содержит двухпоФзиционные переключатели 1, (где "аб" - нормально замкнутые (первые) контакты переключателей, "бв" нормально разомкнутые ( вторые ) контакты переключателей ), элементы 2 ИЛИ, триггеры 3, выходные элементы 4 ИНЕ, выходы...
Предыдущий патент: Устройство для функциональной обработки управляющего сигнала в следящих системах
Следующий патент: Устройство для приготовления шлихты электроконтактным нагревом
Случайный патент: Способ получения цианамида