Устройство управления для систем переменной структуры
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 489077
Авторы: Генин, Козиоров, Купервассер

Текст
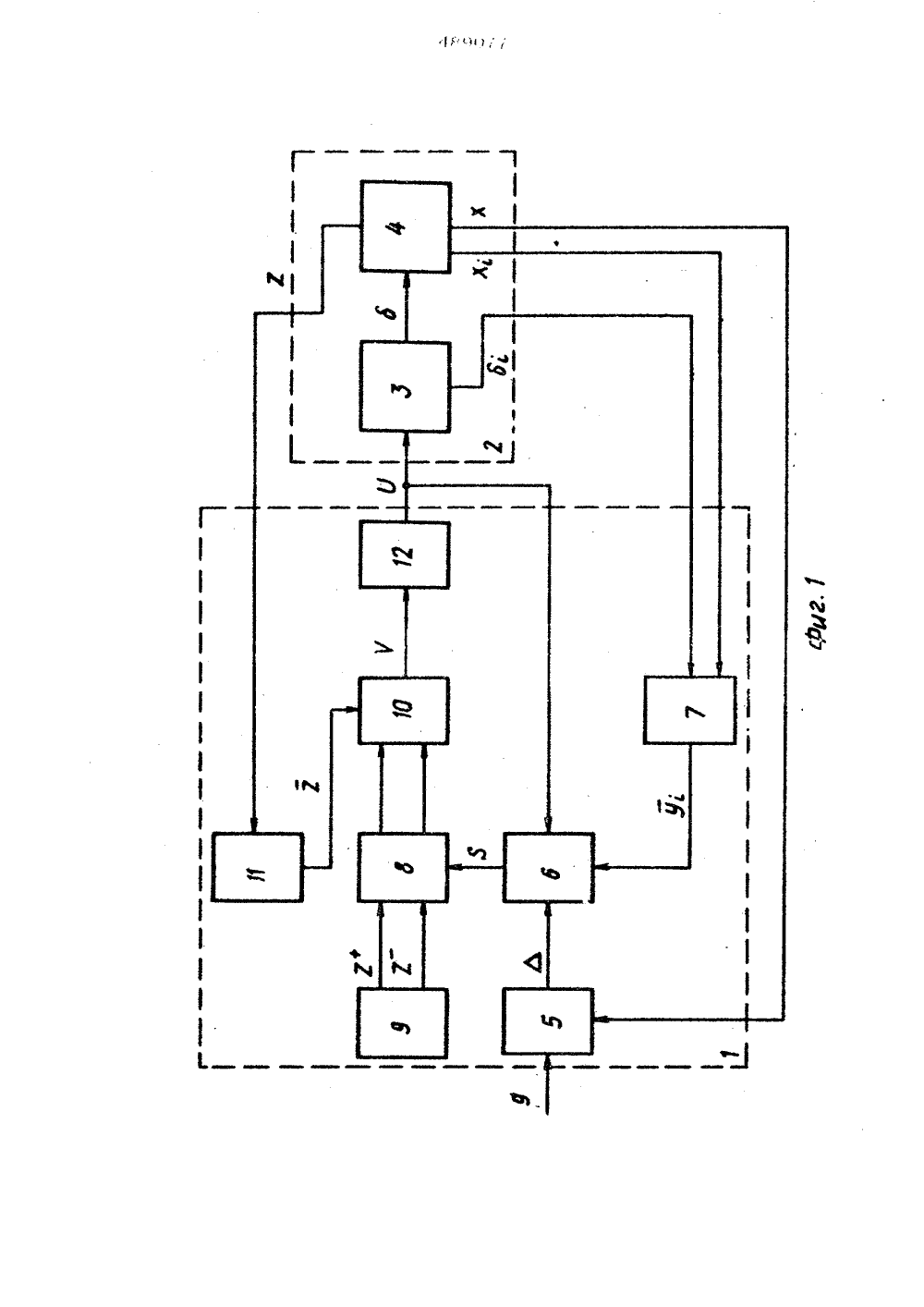
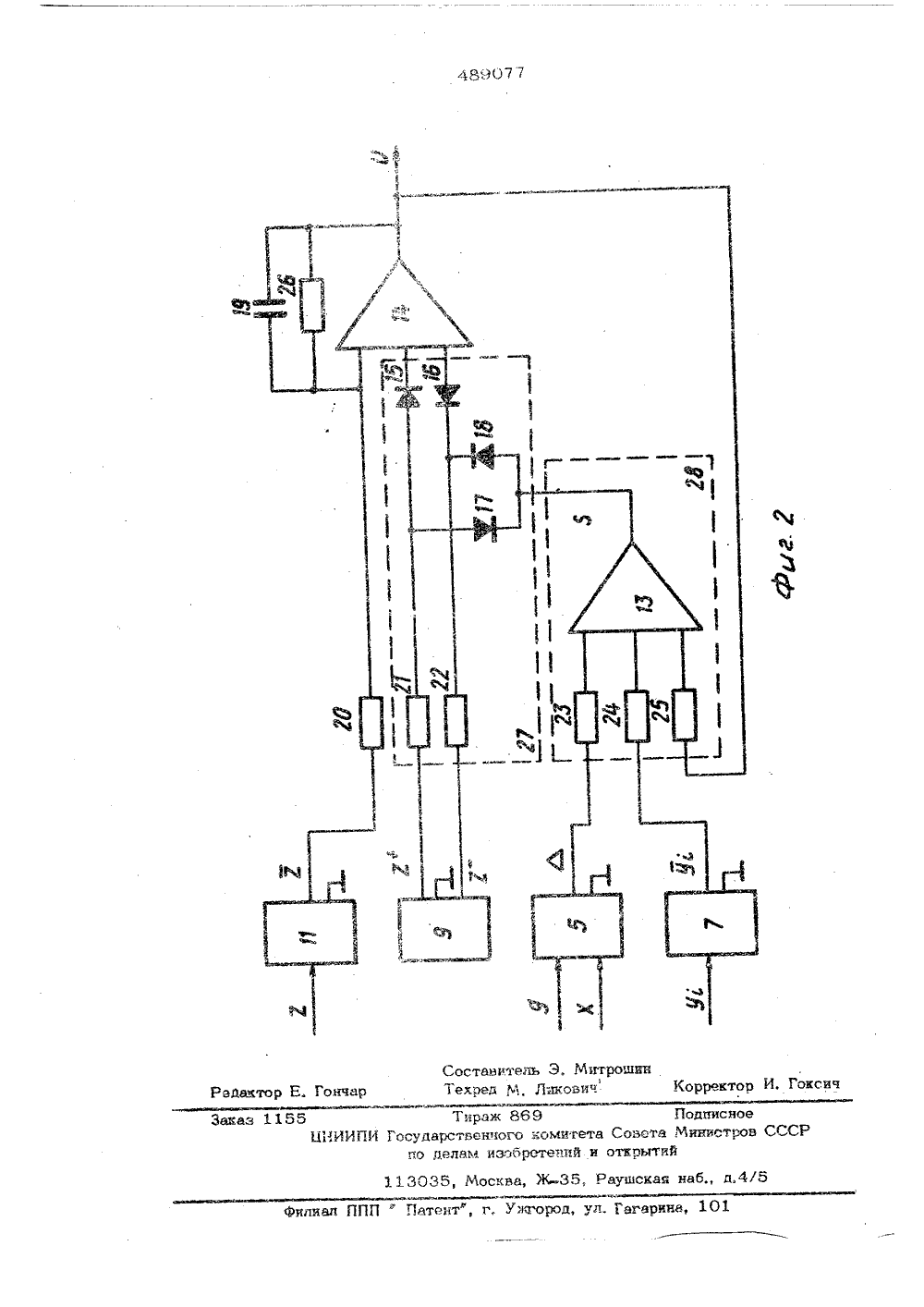
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалйстических Республик. Кл.б исоединением заявкиооудеротвеииый комитетСовета Мяиястров СССРоо делам изооретеиийи открытий(72) Авторы изобретения Д. 3. Гении,М, Коэи И, Купервассер 1) Заяв ЕНИЯ ДЛЯ СИСТЕМРУКТУРЫВО УПР МЕННО авлвдиройИзобретение относится к автоматикеи может быть применено в системах автоматического управления.Известны устройства управления длясистемы переменной структуры, содержашие перекг.очаюший блок, управляюшийвход которого подключен к выходу формирователя функции переключения, входы которого, соответственно, подключены к выходам блока сравнения, датчика промежуточных координат и фильтра, сумматор,связанный через фильтр с исполнительнымблоком, датчик текущих значений ограничиваемой координаты и задатчнк предельныхзначений ограничиваемой координаты,Бель изобретения - повышение падежности устройства. Достигается это тем, чтов нем задатчик предельных значений ограничиваемой координаты подключен к сигнальному входу логического переключаюшего блока, а выход датчика текуших значений ограничиваемой координаты - к соответствуюшему входу сумматора,На Фиг. 1 дана блок-схема системы переменной структуры с предлагаемым устройством управления; на фиг, 2 - упр юшее устройство.Система состоит иэ управляюшего устъ ройства 1 и неизменчемой части 2, включаюшей исполнительный блок 3 и объект 4 На блок сравнения 5 поступают задаюшев воздействие Я и регулнруемаа координата Х и формируется рассогласование фф-Х. формирователь функции переключения 6 связан по входу с блоком сравнения 5, датчиком 7 промежуточных координат ф и Хс соответственно исполнительного блока 3 и объекта 4, а по выходу - с управляющим входом логического переключающего блока 8. Сигнальные вхо ды логического переключаюаего блока сва эаны с датчиком 9 предельных верхнего Й и нижнего 3 значений ограничвваемой координаты, а выходы - с выходным сумматором 10, на который подан также выходкой сигнал З датчика 11 текущих значений ограничиваемой коор наты Я . Выходом управляюшего уст ства 1 является выходной сигнал фильтра 12, связанного по входу с выходнымсумматором 10, Цепь обратной связи ой- разуетсяпутем подачи выходного сигна лафр чьтра 1 2 на ф мрчватель Йуш:ции переключения 6, .выходной сигнал которого обозначен через,3, ."ыходной сигнал сумматора 1 О- через ,К, датчик а и:"оме".,%уточч ьх коордугчар 7 р, ч,м, правлаюшее устройство выполнено на двух усилителях 13, 14, диодных элем. птах "5.-18 конден"аторе 19 и резис орах И 2 Ои включает датчики 5, 7, 11 и задатчик 9.Логический переключающий блок 8 представляет диодный ключевой элемент 27 составленный из четырех диодов 15-18 и двух 15 резисторов 21, 22. Формироватещ фужции переключения 28 выполнен на усилителе 13 и резисторах 23 - 25, бумматор и фильтр реализованы на одном усилителе 14, охваченном обратной связью. На вход этого усиО лителя через конденсатор 19 и резистор 26 поданы выходные сигналы логического переключдг)щего блока 8 и через резистор 20 датчика текущих значений ограничиваемой координаты, 25;Устройство управления работает следующим обрезом. При отсутствии возмущений, и управляющего воздействия фа О 3 в контуре, замыкаемом цепью отрицательной обратной связи с выхода усилителя 14 на входЭО усилителя 13, существует скользящий режим, в результате которого сигнал н+а входе усилителя 14 переключается сЕ наЯ и обратно, а сигналы Д и Я на выходах усилителей 13 и 14 практичен З 5 ки равны нулю за счет емкостной и глубокой отрицательной обратной связи( =5=При малых возмущеникх, приводящих к изменению суммарного сигнала Д=Ь+ Я со скоростью, меньшей предель Оиой, в системе поддерживается скользящий .режим, при котором выход формирователч офункций переключания поддерживается равным нулю, и, поскольку Д ф 8- Увыходной сигнал У формируется равнымсигналу Д . Предельная скорость определяется значениями 2Еи параметрами фильтра,При задании больших возмущений сигнал8 сохраняет некоторое время один знак,системе переходит в режим ограничения координаты Ж на исполнительный блок 3 поступает сигнал, пропорциональный рассогласованию между предельным и текущим значениями ограничиваемой координаты,Поскольку сигнал У обнуляется исполнительным блоком 3, то текущее значениеограничиваемой координаты становится рав.ным предельному, Отработка ошибки по регулируемой координате, приводит к уменьшению 6, изменению знаками на противоположный и восстановлению скользящегорежима,Предмет изобретения Устройство управления для систем переменчой структуры, содержащее переключающий блок, управляющий вход которого подключен к выходу формирователя функции переключения, входы которого, соответственно, подключены к выходам блока сравнения, датчика промежуточных координат и фильтра, сумматор, связанный через фильтр с исполнительным блоком, датчик текущих значений ограничиваемой координаты и задатчик предельнь значений ограничиваемой координаты, о,т я и ч а юш е е с я тем, что, с целью повышения надежности работы устройства, в нем задатчик предельных значений-ограничиваемой координаты подключен к сигнальному входу логического переключающего блока, а выход датчика текущих значений ограничиваемой координаты подключен к соответствующему входу сумматора.. Гоксич Гонч кто 5 Тира 1",и Госчдарственно ио делщ 4 иапо 11 ЭО 35, Москв
СмотретьЗаявка
1893946, 16.03.1973
ПРЕДПРИЯТИЕ ПЯ В-2481
ГЕНИН ДМИТРИЙ ЗИНОВЬЕВИЧ, КОЗИОРОВ ЛЕВ МИХАЙЛОВИЧ, КУПЕРВАССЕР ЮРИЙ ИЛЬИЧ
МПК / Метки
МПК: G05B 13/02
Метки: переменной, систем, структуры
Опубликовано: 25.10.1975
Код ссылки
<a href="https://patents.su/4-489077-ustrojjstvo-upravleniya-dlya-sistem-peremennojj-struktury.html" target="_blank" rel="follow" title="База патентов СССР">Устройство управления для систем переменной структуры</a>
Устройство для измерения среднеквадратичного значения сигнала

Номер патента: 930135
Опубликовано: 23.05.1982
МПК: G01R 19/02
Метки: значения, сигнала, среднеквадратичного
...корня, и таймер, дополнительно введены блок де. ления и элемент сравнения, причемпервый вход элемента сравнения соединен с выходом блока возведения вквадрат, а второй вход - с другим вы 40ходом запоминающего элемента, выходэлемента сравнения соединен с первымвходом блока деления, второй входкоторого соединен с выходом таймера,а выход блока деления соединен совходом интегратора,На чертеже:приведена структурнаясхема предлагаемого устройства.Устройство для измерения среднеквадратичного значения сигнала содержит датчик 1 измеряемого сигнала,блок 2 возведения в квадрат, входкоторого соединен с выходом датчика1, элемент 3 сравнения, первый выходкоторого соединен с выходом блока 2 Бвозведения в квадрат, а второй входс первым выходом...
Фильтр среднего значения сигнала

Номер патента: 801232
Опубликовано: 30.01.1981
Авторы: Пархоменко, Сверчков
МПК: H03H 7/01
Метки: значения, сигнала, среднего, фильтр
...изменениюнапряжений Ои 0 , На интервалеЙЬзамкнутого состояния ключа 22, такжеравном Т, на общий выход выходногокоммутатора 5 поступает неизменное наэтом интервале напряжение интегратора19, так что Ц - 0 . В рассматриваемом случае Т равно периоцу помехина входе фильтра, поэтому на интервалезамкнутого состояния ключа 22 на выходе выхоцного коммутатора 5 будет иметьместо постоянное напряжение О, пропорциональное постоянной, т, е. полезнойсоставляющей напряжения Цх .По истечении интервала Т ключ 22размыкается, а ключ 27 замыкается соответствующим изменением напряжений)яди )щ на управляющих входах этихключей. Конденсатор интегратора 19разряжается через ключ 27 до нуля и,таким образом, интегратор 19 будет подготовлен к следующему циклу...
Стробоскопический осциллограф с цифровым запоминанием мгновенных значений сигнала

Номер патента: 911342
Опубликовано: 07.03.1982
МПК: G01R 13/20
Метки: запоминанием, значений, мгновенных, осциллограф, сигнала, стробоскопический, цифровым
...сигналу, с выхода блока 1 синхронизации поступают на входсинхронизируемого генератора 2, который с проходом синхросигнала начинает генерировать серию импульсов.5 В исходном состоянии числа, записанные в счетчиках 3 и 5 равны, иселектор 6 в момент прихода первогоимпульса серии открыт сигналом с выхода компаратора 4 кодов, Часть им пульсов серии, прошедшая в течениепериода входного сигнала через селектор 6, исключается делителем 7 с тем,чтобы время между двумя стробимпульсами на выходе делителя 7 было доста точным для обработки одной выборки.Число в счетчике 3 увеличиваетсяна единицу с каждым импульсом генератора 2, Сигнал переполнения этогосчетчика вырабатывается в конце об работки одного периода входного сигнала, останавливает...
Способ преобразования среднего значения сигнала в код

Номер патента: 951696
Опубликовано: 15.08.1982
МПК: H03K 13/20
Метки: значения, код, преобразования, сигнала, среднего
...следующим образом.Аналоговая часть устройства,включающая источник 2, интегратор 3, генератор 1, источник 5 и сравнивающее устройство 6 работает в асинхронном режиме непрерывно. В исходном состоянии выходной сигнал интегратора 3 Цравен пороговому сигналу 0( Фиг.2, г) а выходной сигнал генератора ч О к (фиг. 2,в ) равен нулю, На первый и второй входы интегратора поданы вспомогательный Офиг. 2,б) и преобразуемый Ц( фиг. 2,а ) сигналы.Величина вспомогательного сигнала выбирается из условия отсутствия нелинейных искажений на выходе интегратора при интегрировании суммы максимального входного и вспомогательного сиГналов,В момент времени то начинает развертываться во времени Ок, и интегратор 3 одновременно интегрирует преобразуемый 0(,...
Устройство для определения среднеквадратичного значения сигнала

Номер патента: 1624480
Опубликовано: 30.01.1991
Авторы: Копытин, Кушнаренко, Смирнов
МПК: G06F 15/36
Метки: значения, сигнала, среднеквадратичного
...блоки деления, первый 5 и второй счетчики, блок вычитания и синхронизатор, выход первого счетчика соединен с входом делимого первого блока деления, вход делителя которого соединен с выходом второго счетчика, вход вычитае мого блока вычитания соединен с входомзадания порогового уровня устройства, тактовый вход синхронизатора является тактовым входом устройства, первый выход синхронизатора соединен со счетным вхо дом второго счетчика, о т л и ч а ю щ е е с ятем, что, с целью повышения точности, в устройство введены блок ключей, накапливающий сумматор, узел формирования весовых коэффициентов, первый и второй 20 блоки умножения, элемент ИЛИ, причем информационный вход блока ключей является информационным входом устройства, выходы блока...
Предыдущий патент: Анализирующее устройство самонастраивающейся системы
Следующий патент: Система управления пространственным положением объекта
Случайный патент: Транзисторный ключ с токовой обрат-ной связью