Система управления пространственным положением объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 489078
Авторы: Леденев, Сапожников
Текст
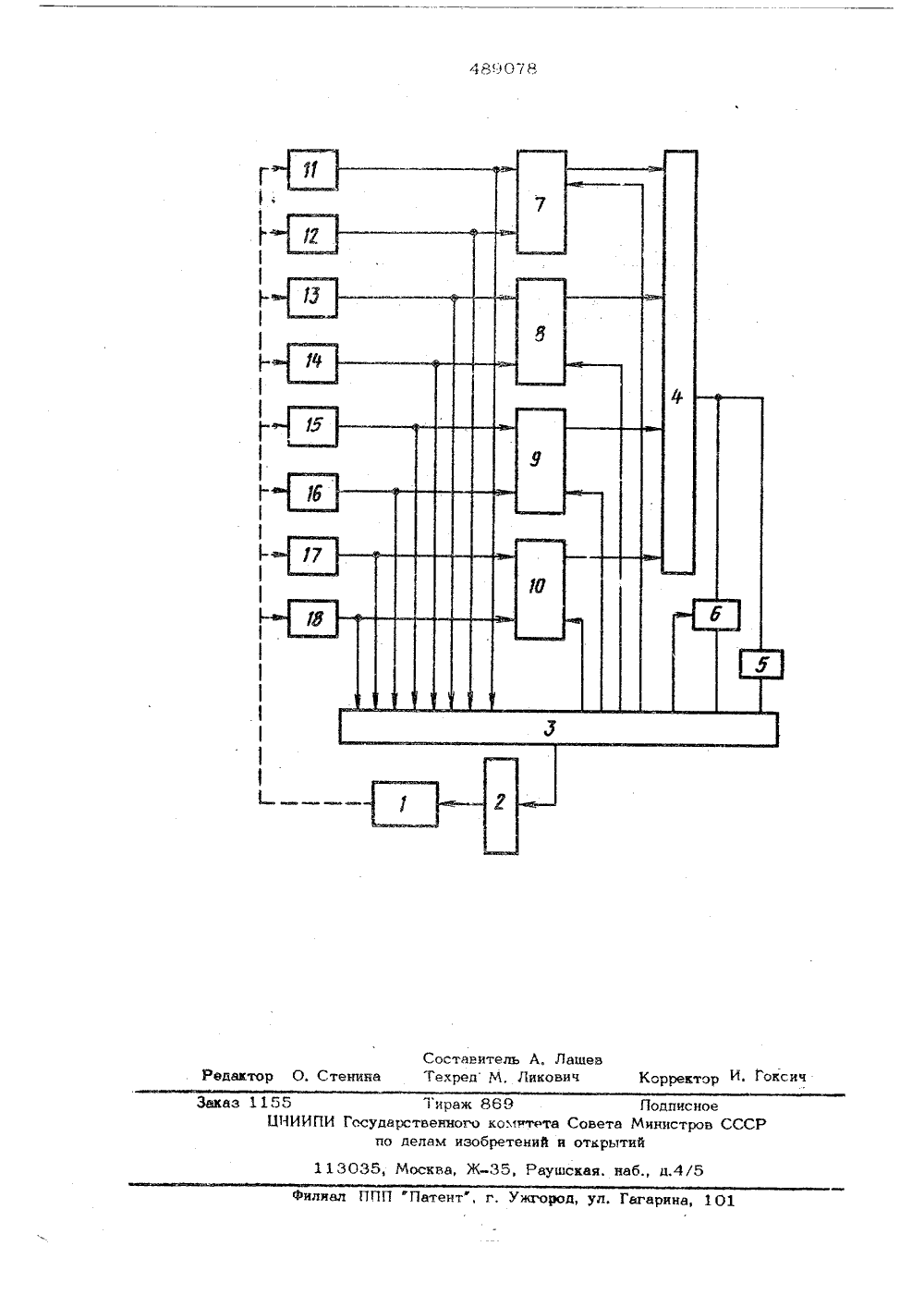
О Л И С А И И Е4 цво 7 вИЗОБРЕТЕИ ИЯ Союз СоветскииСоциалистическихРеспублик(61) Дополнительное к авт, свид-ву(22) Заявлено 01.04,74 (21) 2010695/18 с присоединением заявки 1. Кл,605 в 1502 6050 1/О 2 Гасударстаенный иамитет Соаета Иинистраа СССР в делам изобретений н атирмтий(54) СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ ОБЪЕКТА об сти Изобретение относитсатического управленияльзовано для управленя м положением абъект ыть исрянственвм например л выс ить Цель изобретенич -О ность системы управл в датчиков соответствуюшей пары, третьивходы соединены с соответствуюшими щаходами логиче кого устройства, суммируюшее устройство, к соответствуюшим входам которого подключены выходы всех ком 2 О мутаторов, выход соединен со входом догаческого устройства через пороговый элемент и через ключ, управлявший вход котов- рого связан с ссответствуюшим выходом о-;логического устройства, а датчики четвертой пары установлены так, что их сн.и чуцван по та тельного аппарата.Известны системы управления простоанственнъ 1 м положением объекта, содержащие четыре пары датчиков, оси чувствительнос 1 тн которых в трех парах совпадают соответственно с тремя осями инерпии объекта управления, и логическое устройство со вхсаамн которого соединены выходы соответсввуюших датчиков.Для повышения надежности широко при,меняется резервирование как каналов упра лечия в делом так и входящих в них датчиков, Обычно в систему включаются три идентичнъфх канала управления. Неисправный канал определяется логическим устрой ством путем сравнения сигнала на выходе каждого канала с выходными сигналами двух других каналов.Однако, если входяший в систему упра ленин блок датчиков резервиро к му же методу, т,е. параметр движения оъосительно каждой из инерциальных осей объекта управления измеряется тоемя датчиками с последуюшим сравнением их сигналов, тг в некоторых случаях надежность такого блока датчиков оказывается недостаточной, твк квх при этом допускается отказ не более одного из трех дублирующих друг дру 1 и датчиков. Это достигается тем, что система соержит четыре коммутатора, два входа аждого из которых связаны с выходвпствительности составляют одинаковые углыс каждой осью инерции объекта.На чертеже представлена блок-схемасистемы управления.Она содержит объект управления 1, блох Бвыработки команд 2, логическое устройстяо 3, суммируюшее устройство 4, пороговый элемент 5, ключ 6, коммутаторы 710, датчики 11-18,Система управления работает следуюшим образом,Датчики 11 и 12 измеряют параметрдвижения объекта относительно его инерциальной оси Я датчики 13 и 14 - относительно оси , датчики 15 и 16 - ство Бсительно оси Я, датчики 17 и 18 - относительно оси Я, соствяляюшей с осямиЯ и Х один ковый угол А (оси КЯ ортогональны), Сигнал со всехдатчиков поступает в логическое устройст Мво 3, где показания датчиков, измеряющихпараметр движении относительно одной итой же оси, сравниваются между собой, Когда сигналы дублирующих друг друга датчиков, измеряющих движение относительно Иосей Х У и Е , совпадают между собой,логическое устройство выдает в блок выработки команд сигналы с одного иэ них (дляопределенности - с двтчийов 11, 13 и 15).По этим сигналам блок выработки команд 2 Эвыдает команды, управляющие движениемобъекта управления 1,В начальный момент работы системы управления коммутаторы 7-9 находятся в твком состоянии, что на вьчитаюшие входы,суммируюцего устройства 4 проходят сигналы с датчиков 11, 13 и 15, а сигнал с датчика 17 через коммутатор 10 попадает насуммирующий вход суммирующего устройства 4. СигналУ на выходе суммирующегоустройства 4 равен аБ где Ц - сигнал с датчика, измеряющего параметр движения относительно оси А; Ух, Уу, Ъ -сигналы с датчиков измеряющих параметр движения относитель- . но осей Х, У и В соответственно; Бо7 Ф - коэффициент пропорцяональности, он постоянен и равен 608 4(СС - угол, который ось А составляет с осями Х, У и 2 ).В случае, если показания всех датчиков я правильны, всегда должно выполняться следующее соотношение:Ц, %сазов+ Уусозе Уас 1, ипя з+ бу ф ГЙСбоев.поэтому)Ю бО в том только случае, когда показания всех датчиков правильны. При ЦЦ пороговый элемент 5 находится в исходном состоянии, а ключ 6 закрыт. В случае, если произошел отказ одного иэ двтчииов, например, датчика, измеряющего параметр движения объекта относительно оси Х , показания датчиков 11 и 12 не совпадают между содой. Если отказ произошел в датчике 11, то величина Ь не равна О, срабатывает порогсвый элемент 5 и выдает сигнал об этом в логическое устройство 3. В этом случае оно выдает сигнал в коммутатор 7 на переключение на вход суммирующего устройства сигнала с датчика 12, одновременно в блок выработки команд 2 также выдается сигнал с этого датчика, а не с датчика 11, факт отказа датчика 11 запоминается логическим устройством 3. Если же отказал дат чик 12, то величина Ус остается равной 0 и в логическом устройстве только запоминается факт отказа датчика 12.Аналогичные действия происходят при отка-. зах датчиков, измеряющих параметр движения относительно других осей.В случае, если происходит отказ второго датчика, измеряющего движение относительно одной из осей объекта (например, после отказа датчика 11 отказывает и датчик 12), величина Ц становится неравной О, срабатывает пороговый элемент 5 и выдает сигнал об этом в логическое устройство 3,При этом там уже имеется информация об отказе датчика 11, поэтому (если совпадают между собой сягналы дублирующих друг друга датчиков в других осях) логичеокое устройство определяет, что отказали оба датчика, измеряющие параметр движенич объекта относительно оси Х. В этом случае оно выдает в коммутатор 7 команду на от- ключение выходов обоих датчиков 11 и 12 от входа суммирующего устройства 4. Сигс.нал на его выходе в этом случае будет рв вен Ц, Й у удУПоскольку показания датчиков Ц Уу,Ра верны, то ДЦ , т.е.7 а соответствует параметру движения относительно оси Х. Логическое устройство 3 одновременно с командой на отключение датчиков 11 и 12 открывает ключ 6 и сигнал Уз с выхода суммирующего устройства 4 через ключ 6 поступает в логическое устройство 3, которое подключает его ко входу блока вырвбот- ки команд 2 вместо сигнала с датчиков, измеряющих параметр движения объекта отноительно оси Х.Таким образом, в системе управления, содержащей 8 датчиков .параметра движенияОбеспечивается нормяльное ее фун:гдионирование при отказе по меньшей море любых двух датчиков.бПредмет изобретенияСистема управления пространственным положением объекта, содержашая четыре пары датчиков и логическое устройство, со 1 О входа.ли которого соединены выходы соответ твуюших датчиков, о т л и ч а к ш ая с я тем, что, с целью повышения надеи( 6 ности 1 лф 1тн си(;тем Онл (".Ол( р %ит пр(ьговый эл.м(.нт, нищ и четн(рс коммутн(РЯБ ДВЙ ВХлй КЕ 1 ЖЛОГО ЙЗ К 1 ГЧ фХ ГРЯ(ЮИС ВЫХОДамя ДатчИКОВ СОС(ВТот ВУК г . и ц ры третьи входы соединен( с (Отнеу (.вующими выхдами логи(е,кого у(.тр 1 йст( Я.суммируюшее устройство, к сответству къшим входам которого по 1 Ьлючены выходыкоммутаторов, выход соединен со входом;логическ(ьго устрЯства черезпороговЫЯ1элемент н через ключ, управляюишй входкоторого связан с (Оответствукчпим викодом логического устройся а,Составитель А, Лашевенина Техред М, Ликович Корректор И. Гоксин 13035, Москва, Ж, Раушскаи, наб., д,4/5 Филиал ППП Патент, г ул. Гагарина аз 1155 ЦНИИПИ Гсс Тираж 869 Подписноедарственного коюфтета Совета Министров СССРо делам изобретений и открытий
СмотретьЗаявка
2010695, 01.04.1974
ПРЕДПРИЯТИЕ ПЯ В-2572
ЛЕДЕНЕВ ГЕННАДИЙ ЯКОВЛЕВИЧ, САПОЖНИКОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 15/02
Метки: объекта, положением, пространственным
Опубликовано: 25.10.1975
Код ссылки
<a href="https://patents.su/4-489078-sistema-upravleniya-prostranstvennym-polozheniem-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Система управления пространственным положением объекта</a>
Оптико-электронный датчик положения объекта

Номер патента: 1229572
Опубликовано: 07.05.1986
Авторы: Егорычев, Потапов, Привер
МПК: G01B 21/00
Метки: датчик, объекта, оптико-электронный, положения
...зеркало 8, связанное с объектом измерений (не показан). Оптические элементы установлены в цилиндрическом корпусе 9. Светочувствительная площадка фотоприемника 6 и диафрагма 3 расположены в сопряженных плоскостях изображений оптической системы, состоящей из выпуклого зеркала 8 и объектива 5, фотоприемник 6 и объектив 5 установлены один напротив другого на основаниях цилиндрического корпуса 9, а источник 1 - на его боковой поверхности.Электронная схема 7 содержит два дифференциальных усилителя, присоединенных соответственно к двум парам противоположно размещенных элементов квадрантного фотоприемника 6, а также два синхронных детектора, управляемые от генератора 2 и соединенные с выходами усилителей. (Элементы электронной схемы на...
Устройство для измерения параметров движения объектов

Номер патента: 1062900
Опубликовано: 23.12.1983
Авторы: Беляев, Гриценко, Корниенко, Мудла
МПК: H04N 7/18
Метки: движения, объектов, параметров
...вход первого сумматсра соединен с выходом первого блока задержки, а выход - со вторым входомвторого блока вычитания, второйвход второго сумматора подключенк выходу АЦП, а выход - к второмувходу третьего блска вычитания,вход ЦП соединен с выходом телевизионной передающей трубки, а такжерегистр значений перепада, первыйвход которого соединен со строчным выходом синхронизатора, второйвход - с выходом первого блока вычитания, третий вход - с выходомблока сравнения, а выход - с вторымвходом блока сравнения, регистр координаты по оси У и регистр координаты по оси Х,.первые входы которь 1 х соединены с соответствующимивыхоцами синхронизатора, вторыевходы - с выходом блока сравнения,а выходы - соответственно с первым и вторым входами...
Устройство для определения параметров движения изображения оптически неоднородного объекта

Номер патента: 1313177
Опубликовано: 20.09.2006
Авторы: Абакумов, Арефьев, Кузнецов, Мишин, Семавин
МПК: G01P 3/36
Метки: движения, изображения, неоднородного, объекта, оптически, параметров
Устройство для определения параметров движения изображения оптически неоднородного объекта, содержащее две группы взаимнопараллельных линейных фотоприемников, расположенных попарно, с ориентацией пар разных групп вдоль диагоналей равных прямоугольников симметрично относительно общей оси, на которой лежат центры прямоугольников, а также блок сравнения, следящий привод, механически соединенный с фотоприемниками и датчиком угла поворота, выход которого подключен к блоку индикации, и первый функциональный преобразователь, выходы которого соединены с блоком индикации, а первый вход подключен к выходу датчика угла поворота, отличающееся тем, что, с целью повышения точности определения...
Устройство для измерения параметров движения объекта

Номер патента: 1000748
Опубликовано: 28.02.1983
Авторы: Карпов, Квасов, Кузнецов, Полонин, Прохоренко
МПК: G01B 11/00
Метки: движения, объекта, параметров
...объект (28 находится в фокальной плоскости микрообъектива 11.По сути устройство представляет собой фотоэлектрический интерферометр.Устройство работает следующим образом.При смещении объекта 28 в направлении оптической оси падакщего на него сигнального. пучка света интерферометра происходит изменение интенсивности интерференционной картины на выходе интерферометра, пропорциональное величине смещения.Изменение интенсивности интерференционной картины преобразуется при помощи фотопреобразователя 8 в переменный электрический сигнал, изменяющийся по закону изменения амплитуды смещения объекта 28. Этот электрический сигнал поступает на механизм 5 линейного перемещения опорного зеркала 4 и смещает опорное зеркало 4 на величину, равную...
Устройство для измерения параметров движения объекта

Номер патента: 1422160
Опубликовано: 07.09.1988
Авторы: Денисевич, Каликин, Камышный, Кинщак, Нестеров
МПК: G01P 3/68
Метки: движения, объекта, параметров
...напряжение с третьего выхода блока 19 управления,Матрица 16 анализирующих оптических масок анализируетиэображениес второго инФормационно измерительного канала блока 26 вычисления кор60 6чин разложения входного изображения.По истечении времени записи элемент44 задержки выдает сигнал на единичный вход триггера 37, который закрывает элемент И 39, обесточиваетусилитель 41 и закрывает электронныеключи 23, и прямой выход которогочерез усилитель 42 открывает электронные клнчи 24.В результате корреляционного сравнения сигнал со схемы 27 сравненияпоступает на единичный вход триггера 35 и переводит его в единичное состояние. Сигнал с прямого выхода триггара 35 поступает на входы установкив "0" триггеров 36 и 37 и элемент 43задержки. При этом...
Предыдущий патент: Устройство управления для систем переменной структуры
Следующий патент: Устройство для сопряжения автоматизированной системы управления с оператором
Случайный патент: Резец с механическим креплением режущей пластины с отверстием