Следящая система для отработки арктангенсной функции
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
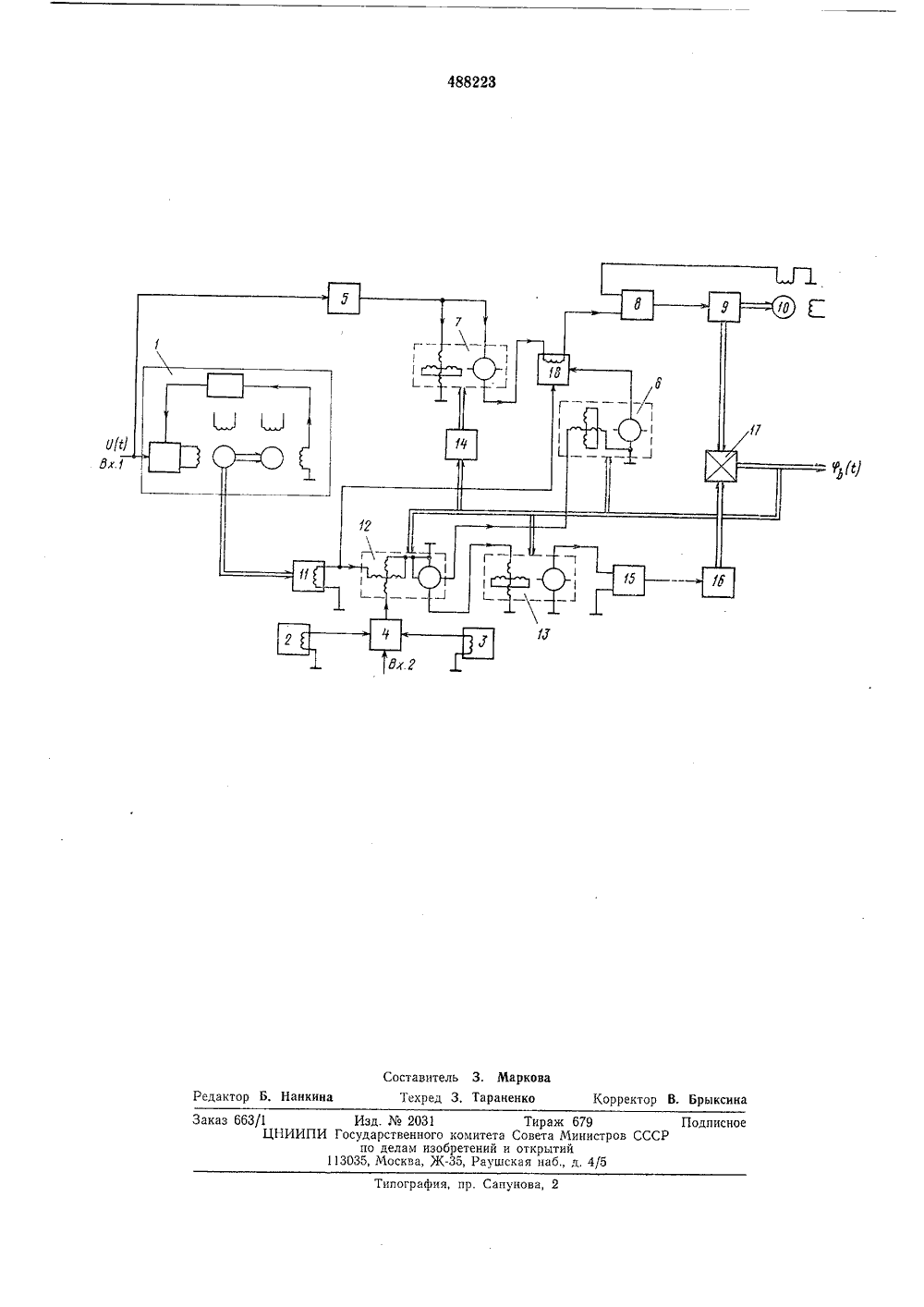
и 488223 ОПИСАН И Е ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Сова Соеетских Социалистических Республик(22) Заявлен с присоединением заявкиГосудорстоеииык к Соеета Мииистроо ите (23) Приоритет 3) УДК 621,3(088 публиковано 15,10.75. Бюллетень38ата опубликования описания 22.04.76 ло делам и 1 обретаиии и открытий. Шандрук В. Лавриков, Ю, Ю. Михалевич, Ю. И. Сухо 71) Заявит ТРАБОТК 54) СЛЕДЯЩАЯ СИСТЕМА ДЛЯ АРКТАНГЕИСНОЙ ФУН 2 х б оков и связе льно повысит очность систе дные процессь ительньоляет знтатичесшить п Наличие дополн между ними позв динамическую и с мы, а также улуч в системе.Блок-схема пре мы представлена н ю т й с дящеи сис гаемерте Изобретение относится к функциональным счетно-решающим следящим системам и может найти применение в бортовых и наземных управляемых визирных системах,Известна следящая система для отработки арктангенсной функции, содержащая электромеханический интегратор, вход которого связан с первым входом системы, а выход - через линейный вращающийся трансформатор - с статорной обмоткой первого синусно-конусного вращающегося трансформатора (СКВТ), роторная обмотка которого подключена к статорной обмотке второго СКВТ, первый исполнительный двигатель, вход которого через пер- вый усилитель соединен с роторной обмоткой второго СКВТ, а вал - через первый вход дифференциала - с выходным валом следящей системы и роторами первого и второго СКВТ, первый и второй источники пропорциональных напряжений.Известная система имеет низкую динамическую и статическую точность,Предлагаемая система дополнительно содержит третий и четвертый СКВТ, переключающее устройство, сумматор, второй усилитель, второй двигатель, тахогенератор, редуктор и масштабный трансформатор, при этом вал второго двигателя связан со вторым входом дифференциала и валом тахогенератора, а вход - с выходом второго усилителя, вход которого подключен к выходу тахогенератора, ротор четвертого СКВТ непосредственно, а ротор третьего СКВТ - через редуктор соединены с выходным валом системы, вход мас штабного трансформатора подключен к первому входу системы, а выход - к статорной обмотке возбуждения третьего СКВТ и через роторную косинусную обмотку третьего СКВТ - к одному из входов сумматора, дру гие входы которого подключены к выходу линейного вращающегося трансформатора (ЛВТ) и роторной синусной обмотке четвертого СКВТ, а выход - ко второму входу второго усилителя, выходы первого и второго ис точников пропорциональных напряжений соединены со входами переключающего устройства, выход которого подключен к статорной квадратурной обмотке первого СКВТ, управляющий вход - ко второму входу следящей 20 системы, а роторная синусная обмотка первого СКВТ соединена со статорной обмоткой возбуждения четвертого СКВТ.Система содержит электромеханический интегратор 1, источники пропорциональных напряжений 2 и 3, переключающее устройство 4, масштабный трансформатор 5, СКВТ 6 и 7, усилитель 8, двигатель 9, тахогенератор 10, ЛВТ 11, СКВТ 12 и 13, редуктор 14, усилитель 15, двигатель 16, дифференциал 17, сумматор 18,Следящая система работает следующим образом.Входной сигнал У в виде напряжения переменного тока, пропорционального тангенИх циальнойскорости линии визирования поН дается с входа Вх 1 системы на вход электро- механического интегратора 1. Одновременно это же напряжение подается на первичную обмотку масштабного согласующего трансформатора 5. Выход интегратора, поворот вала двигателя, пропорциональный интегралу от входного воздействия или тангенсу заданного значения воспроизводимой функции, передается на ЛВТ 11. Линейный вращающийся трансформатор формирует напряжение, пропорциональное тангенсу. Это напряжение подается на одну из статорных обмоток вращающегося трансформатора 12, с помощью которого решается арктангенсная зависимость. На другую статорную обмотку этого вращающегося трансформатора через переключающее устройство 4 подается одно из двух функционально связанных напряжений. Эти напряжения подбираются при настройке построителя: одно - для режима, в котором максимальная величина функции не превышает 78, другое - для режима, в котором функция меняется до 89. Оба эти режима характерны для определенных высот полета объекта. Поэтому их переключение осуществляется автоматом высоты, Такое разбиение режимов или изменение масштаба построителя позволяет получить более высокую точность его работы.Выходной сигнал первого вращающегося трансформатора, снимаемый с косинусной обмотки, после домножения на сов росуществляемого с помощью вращающегося трансформатора 13, поступает на вход усилителя 15, управляющего двигателем 16. Этот двигатель вращает нагрузку через механический дифференциал и одновременно разворачивает кинематически связанные с ним роторы вращающихся трансформаторов. Вращение двигателя происходит до тех пор, пока напряжение на входе первого усилителя не станет равным нулю. Пользуясь известной математической зависимостью, реализуемой четырех- обмоточным синусно-косинусным вращающимся трансформатором, согласно которой на одной роторной обмотке индуцируется напряжение, равноеУр - К (У созе У йп," ), (1) на другойу = К, (из 1 п , + Ус, соз ,), (2)где У, Ус, - напряжения на статорных обмотках; ср, - угол поворота роторного вала ВТ; К, - коэффициент трансформации ВТ, и приняв Ус, =УМКЛррв, , Ус, =УмКг, причем К,=(Н), аналитически сигнал рассогласования, поступающий на вход первого усилителя с косинусной обмотки второго вращающегося трансформатора, можно представить в таком виде У == К(УК, 1 д соз у, -- УК, з 1 и р,) Кт, соз(3) где К К - коэффициенты трансформации соответствующих ВТ; У - максимальная величина пропорционального напряжения; Кь Кг - коэффициенты пропорциональности;р - заданное и выходное значения функции.В момент, когда Ур, -- О, угол поворота ва ла двигателя(8) 40 то вх, - Кз (9)Угловая скорость визирного луча связана стангенциальной скоростью следующим соот ношениемсоз (10)Ж НВходное воздействие У(1) подается на первичную обмотку согласующего масштабноготрансформатора 5, имеющего две вторичныхобмотки,Одна вторичная обмотка этого трансформатора включена последовательно с косинуснойобмоткой вращающегося трансформатора 7,55 ротор которого через редуктор 14 развора-чивается на угол, равный 2 ср другая - к статорной обмотке этого же вращающегося трансформатора. Такое подключение позволяет реализовать математическую зависимость вида60эх (1+ соз 2 у,)" соз ю,=НН 2 Выход косинусной обмотки вращающегося трансформатора 7 подключен к выходу сум мирующего устройства 18, имеющего два вхо 25 р, =КсУс,+Ус, (5)Из выражения (5) видно, что на второй роторной обмотке моделируется напряжение,пропорциональное секансу угла д,.Из выражения (3) после преобразованияполучим10 Й 6ф Вх 4 - КЯ + К 5Ж где И,(Р) -Кп, Р. да и трансформаторный выход. На один вход суммирующего устройства подается напряжение, пропорциональное тангенсу заданного значения функции (1 д в, ), снимаемое с ЛВТ 11, на другой - напряжение, пропорциональное тангенсу текущего значения функции, которая получается перемножением величины секансного напряжения, снимаемого с роторной обмотки первого вращающегося трансформатора, на величину синусного напряжения, формируемого вращающимся трансформатором б. Аналитически сигнал рассогласования, поступающий на вход усилителя 8, управляющего исполнительным двигателем 9, охваченным тахометрической обратной связью, можно представить в таком виде"где К Кув коэффициенты трансформации ЛВТ и ВТ, Выражение (12) после соответствующих преобразований принимает такой вид гдеКЯ, Кь - коэффициенты пропорциональности, причемКя= К 6, Кь1, Кп - коэффици 1созвавент пропорциональности.Таким образом, во втором канале формируется сигнал, пропорциональный ошибке и ее производной. Передаточная функция ошибки системы относительно входного воздействия имеет следующий вид1 э ( Е (р) И 11 в(Р) %(Р)1в 4 (Р) 1 + 1 (Р) + К 4 12 (Р)1 п, п,14", (Р) -1 %Ф) = После подстановки значений 1 Я" (р) в выражение (14) и коэффициентов, выбор которых осуществлен таким образом, что при 1 -- Кп,Кп,: О получим(т РВ+ +КЯК, т) р+К, +Кап,1 Анализ выражения (15) показывает, что в предлагаемом устройстве поставленная цель достигается: система имеет практически астатизм третьего порядка, что обеспечивает вы 15 20 25 Зо 35 ю 45 50 55 60 сокую динамическую точность, а относительный коэффициент затухания, определяемый выражением+ 44 п 4 1Жп +Яп)при любом значении добротности обеспечивает апериодический переходный процесс, чем гарантируется высокое качество регулирования. Предмет изобретения Следящая система для отработки арктангенсной функции, содержащая электромеханический интегратор, вход которого связан с первым входом системы, а выход - через линейный вращающийся трансформатор - с статорной обмоткой первого синусно-косинусного вращающегося трансформатора (СКВТ), роторная обмотка которого подключена к статорной обмотке второго СКВТ, первый исполнительный двигатель, вход которого через первый усилитель соединен с роторной обмоткой второго СКВТ, а вал - через первый вход дифференциала - с выходным валом следящей системы и роторами первого и второго СКВТ, первый и второй источники пропорциональных напряжений, о т л и ч а ю щ а я с я тем, что, с целью повышения динамической и статической точности, следящая система содержит третий и четвертый СКВТ, переключающее устройство, сумматор, второп усилитель, второй двигатель, тахогенератор, редуктор и масштабный трансформатор, при этом вал второго двигателя связан со вторым входом дифференциала и валом тахогенератора, а вход - с выходом второго усилителя, вход которого подключен к выходу тахогенератора, ротор четвертого СКВТ непосредственно, а ротор третьего СКВТ через редуктор соединены с выходным валом системы, вход масштабного трансформатора подключен к первому входу системы, а выход - к статорной обмотке возбуждения третьего СКВТ и через роторную косинусную обмотку третьего СКВТ - к одному из входов сумматора, другие входы которого подключены к выходу линейного врашающегося трансформатора и роторной синусной обмотке четвертого СКВТ, а выход - ко второму входу второго усилителя, выходы первого и второго источников пропорциональных напряжений соединены со входами переключающего устройства, выход которого подключен к статорной квадратурной обмотке первого СКВТ, управляющий вход - ко второму входу следящей системы, а роторная синусная обмотка первого СКВТ соединена со статорной обмоткой возбуждения четвертого СКВТ.Составитель 3. Марковаедактор Б. Нанкина Техред 3, Тараненко Корректор В. Брык Изд.2031 Тираж 679 Государственного комитета Совета Мини по делам изобретений и открытий 13035, Москва, Ж, Раушская наб., д, 4ипография, пр. Сапунова, 2 каз 663/1 Подпис ЦНИИПИ стров СССР
СмотретьЗаявка
1893844, 13.03.1973
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПРЕДПРИЯТИЕ ПЯ В-8337
ЛАВРИКОВ АНАТОЛИЙ ВАСИЛЬЕВИЧ, МИХАЛЕВИЧ ЮРИЙ ЮРЬЕВИЧ, СУХОВ ЮРИЙ ИВАНОВИЧ, ШАНДРУК АЛЕКСАНДР СЕРГЕЕВИЧ
МПК / Метки
МПК: G06G 7/22
Метки: арктангенсной, отработки, следящая, функции
Опубликовано: 15.10.1975
Код ссылки
<a href="https://patents.su/4-488223-sledyashhaya-sistema-dlya-otrabotki-arktangensnojj-funkcii.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система для отработки арктангенсной функции</a>
Измерительная цепь для передачи информации с вращающихся изделий

Номер патента: 1354028
Опубликовано: 23.11.1987
МПК: G01B 7/16
Метки: вращающихся, измерительная, информации, передачи, цепь
...2 при воздействии измеряемыхвеличин,Увеличение сопротивления тенэоре-эистора 1 приводит к уменьшению магнитного потока в первой половине роторной обмотки 4 и во второй половинероторной обмотки 1 О. Уменьшение сопротивления танзорезистора 2 приводит к увеличению магнитного потокаво второй половине роторной обмотки 4 и в первой половине роторной обмотки 1 О, Так как в каждой из роторных обмоток 4 и 10 магнитные потоки,соответствующие сопротивлению тенэорезисторов 1 и 2, направлены встречно, происходит алгебраическое суммирование этих потоков, в результатекоторого на статорных обмотках 5 и 11появляется напряжение, амплитуда которого является сигналом измерительной информации, а разность фаэ сбсотавляет 180 , Встречное...
Устройство для динамического тензометрирования деталей вращающихся объектов

Номер патента: 1582010
Опубликовано: 30.07.1990
Авторы: Губин, Проценко, Торопов
МПК: G01D 5/12
Метки: вращающихся, динамического, объектов, тензометрирования
...4 питающего токосъемника 8 напряжение генератора 2вызывает в ней ток, а в неподвижнойкатушке 3 - ЭДС взаимной индукции,значение которой отличается от приложенного напряжения на величину падения .напряжения на распределенномактивном сопротивлении .неподвижнойкатушки 4. Неподвижные катушки 4 и 3намотаны скрученными вместе с проводами с одинаковым количеством витков,в силу чего коэффициент связи междуними равен единице. Поскольку неподвижные катушки 4 и 3 включены встречно, то ЭДС взаимной индукции компенсирует ЭДС самоиндукции неподвижнойкатушки 4, Падение напряжения на активном сопротивлении неподвижной катушки 3 исключается применением усилителя 1 постоянного тока с большимвходным сопротивлением,Таким образом, на вход усилителя1...
Устройство для измерения скорости вращения вала синхронной электрической машины

Номер патента: 732746
Опубликовано: 05.05.1980
Авторы: Барановский, Бесчастнов, Ивановский, Нэмени, Сапир, Эпштейн
МПК: G01P 3/48
Метки: вала, вращения, синхронной, скорости, электрической
...входами ключа 7 и переключателя2, Обмотка возбуждения машины соединена через автомат 12 гашения поля систочником 13 тока. К выходу формирователя 1 импульсов подключен частотомер 14,Устройство работает следующим обра.зом.При высоких скоростях вращения вала машины 5 и соответственно высокомуровне сигнала статорной обмотки 4 ктрансформатору 3 через переключатель2 подключены последовательйо включенные формирователь 1 импульсов и частотомер 14, измеряющий скорость вращения. При малых скоростях, когда источник 13 тока обмотки 8 возбуждения отключен посредством автомата 12 гашения поля, уровень сигнала обмотки 4снижается ниже порогового, что приводит к срабатыванию порогового устройства 11. Последнее:воздействует напереключатель 2 и...
Распределительное устройство для системы рулевого управления с усилителем

Номер патента: 1019997
Опубликовано: 23.05.1983
Автор: Жильберт
МПК: B62D 5/06
Метки: распределительное, рулевого, системы, усилителем
...каналами, вы-. между ними каналов 1 полненными в роторе, а во втулке вы- сечения, имеющих оди попнены полости, сообщаемые с каждымв нейтральном положе 15 иэ смежных каналов. ких элементов. В одн При этом полости представляют со- отверстия 5 и 6, свя бой каналы, выполненные в радиальном ной гидролинией 8 и направлении во втулке. соединены с парой ок Каждая из противолежащих кромок верстия 7, связанные окон может. быть выполнена из среднеи и 11 исполнительного 20 части в форме выступающего клина и соединены с парой пр расположенных с обеих его сторон двух вок 12 и 13,наклонных частей. Согласно другомуНа фиг. 1 представлена распредели- тия 5 и 6 соединены тельное устройство для системы руле- ных канавок 12 и 13,25 вого управления с...
Тригонометрический функциональный преобразователь

Номер патента: 1123037
Опубликовано: 07.11.1984
Автор: Ибрагимов
МПК: G06G 7/22
Метки: тригонометрический, функциональный
...деления, выход которогоявляется выходом преобразователя,второй выход коммутатора соединен свходом второго выпрямителя, содержит блок выбораучастка аппроксимации, сумматор и переключатель, при этом выходы первого и второго выпрямнтелей соединены с соответствующими входами блока выбора участка аппроксимации и с информационными входами сумматора, выходы блока выбора участка аппроксимации соединены с соответствующими входами изменения весовых коэффициентов сумматора, выход сумматора и выход второго выпрямителя через переключатель соединены с вторым входом блока деления.Блок выбора участка аппроксимации содержит группу делителей напряжения и группу компараторов по числу участков аппроксимации, при этом первые входы компараторов объединены и...
Предыдущий патент: Интегратор
Следующий патент: Логарифмический функциональный преобразователь
Случайный патент: 158252