Система программного управления электроискровой установкой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
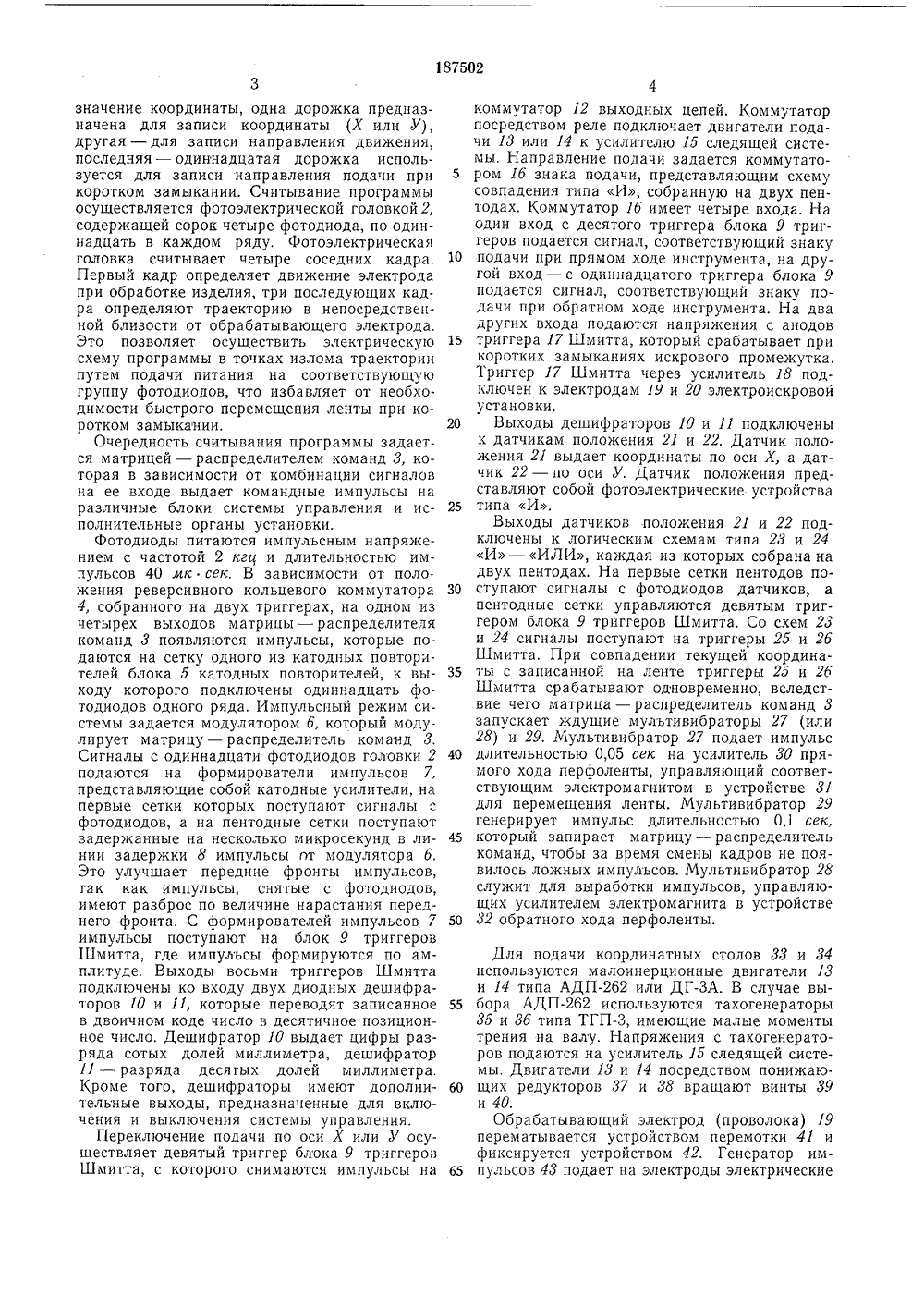
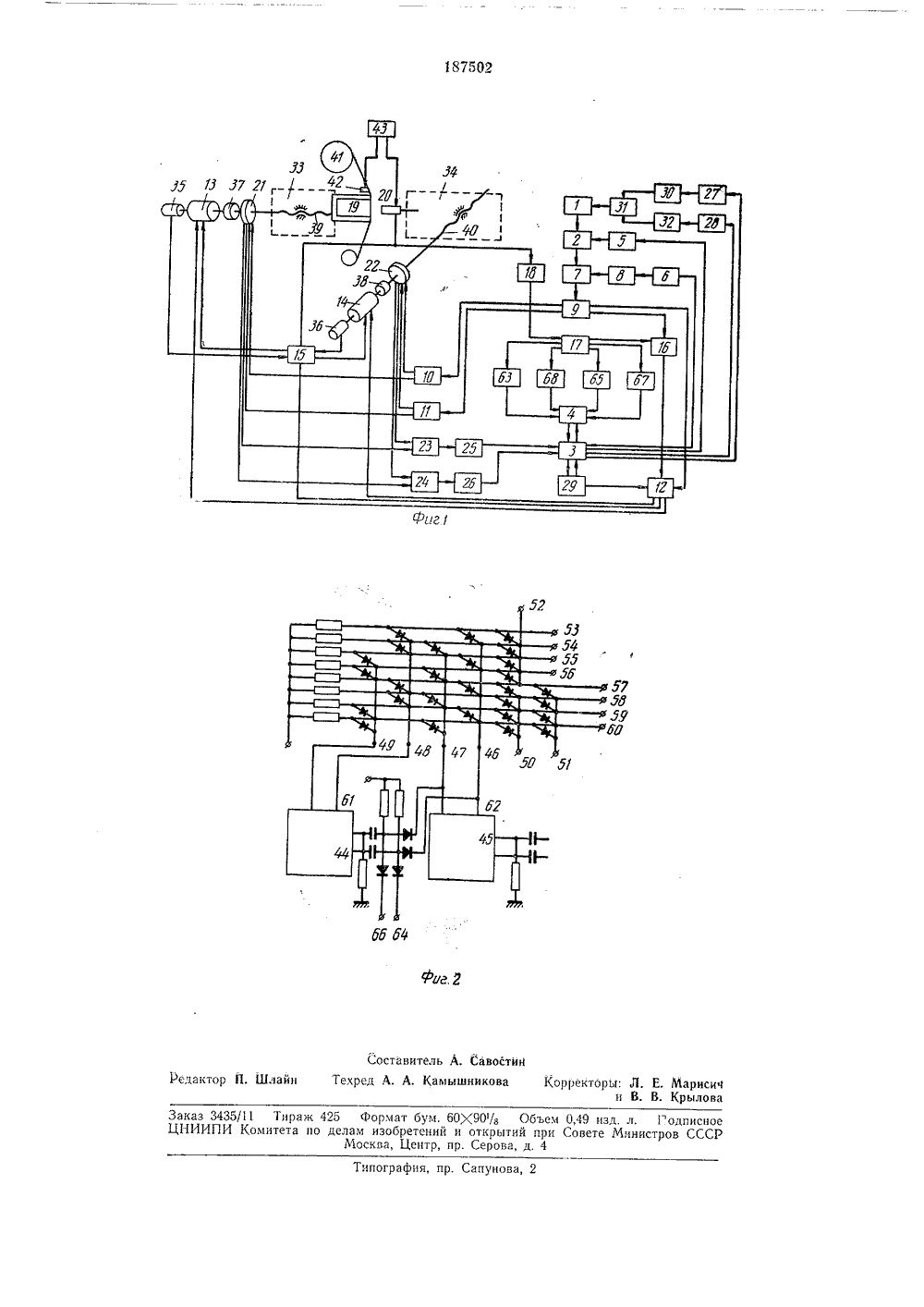
187502 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Сааэ Саеетски Социалистических Республик;т-;:;: АЛЯ Зависимое от авт. свидетельстваЗаявлено 05,Х 1,1963 ( 864455/25-8)с присоединением заявкиПриоритетОпубликовано 11.Х.1966. Бюллетень20 Кл. 49 пт, 1/05 МПК В 23 рУДК 621.9,048.6-503,55(088.8) Комитет по делам изобретений и открытий при Совете Министров СССРДата опубликования описания 21.Х 1.1966 Авторыизобретения К. К, ГДларян и Е. В, Гусев Заявитель СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОИ УСТАНОВКОЙИзвестны системы программного дправления электроискровыми установками для обработки непрофилированным электродом деталей с прямолинейными контурами, параллельными осям координат, с различными способами интерполяции приращений координат, и устройствами для отвода и подвода ицстрдмента по пройденной траектории.Описываемая система программного управления электроискровой установкой позволяет осуществлять реверс при коротких замыканиях с отводом электрода по пройденной траектории. Это достигается применением электронной коммутации считыьающих фотодиодов с автоматической выборкой соответствующего кадра программы,На фиг. 1 изображена блок-схема устройства, построенного по описываемой системе; на фиг. 2 - схема коммутатора системы,Координаты точек, образующих контур обрабатываемой детали, записываются на перфоленте. Так как система предназначена только для изготовления деталей с прямолинейными контурами, параллельными осям координат, в каждом кадре записывается только одна координата - Х или У. В системе имеется дьа двигателя, один из которых обрабатывает деталь по линиям, параллельным оси Х, дрдгой - по линиям, параллельным оси У. Продолжительность работы двигателей определяется координатаъти конечных точек отрезков прямых линий.Система управления непрерывно сравнивает координату положения обрабатывающе го электрода с узловыми точками траектории,записанной на перфоленте. Если обрабатывающий электрод перемещается по направлению к какой-либо точке, производится непрерывное сравнение координат электрода и этой 10 точки. При коротком замыкании искровогопромежутка электрод начинает двигаться к предыдущей точке, и поэтому координата электрода начинает сравниваться с координатой этой предыдущей точки, При совпадении 15 координат электрода с заданными система дправления тормозит двигатель и перемещает перфоленту на следующий кадр. Производится чтение программы, записанной на очередном кадре, и ее отработка.20 При обработке контура, состоящего из от.резков прямых, перпендикулярных друг дрд гД, в случае короткого замыкания необходимо смещать программы на 2 кадра назад, так как координата, с которой в этом случае сравни вают положение электрода, записана на предыддщем участке, параллельном обрабатываемому.Программа вводится в систему с помощьюперфоленты 1. На восьми дорожках ленты, в 30 двоично-десятичном коде, записано цифровое55 60 65 значение координаты, одна дорожка предназначена для записи координаты (Х или У), другая - для записи направления движения, последняя - одиннадцатая дорожка используется для записи направления подачи при коротком замыкании. Считывание программы осуществляется фотоэлектрической головкой 2, содержащей сорок четыре фотодиода, по одиннадцать в каждом ряду, Фотоэлектрическая головка считывает четыре соседних кадра. Первый кадр определяет движение электрода при обработке изделия, три последующих кадра определяют траекторию в непосредственной близости от обрабатываюшего электрода. Это позволяет осуществить электрическую схему программы в точках излома траектории путем подачи питания на соответствующую группу фотодиодов, что избавляет от необходимости быстрого перемещения ленты при коротком замыкании.Очередность считывания программы задается матрицей - распределителем команд 3, которая в зависимости от комбинации сигналов на ее входе выдает командные импульсы на различные блоки системы управления и исполнительные органы установки.Фотодиоды питаются импульсным напряжением с частотой 2 кгц и длительностью импульсов 40 ик сек. В зависимости от положения реверсивного кольцевого коммутатора 4, собранного на двух триггерах, на одном из четырех выходов матрицы - распределителя команд 3 появляются импульсы, которые подаются на сетку одного из катодных повторителей блока б катодных повторителей, к выходу которого подключены одиннадцать фо. тодиодов одного ряда. Импульсный режим системы задается модулятором б, который модулирует матрицу - распределитель команд 3. Сигналы с одиннадцати фотодиодов головки 2 подаются на формирователи импульсов 7, представляющие собой катодные усилители, на первые сетки которых поступают сигналы с фотодиодов, а на пентодные сетки поступают задержанные на несколько микросекунд в линии задержки 8 импульсы от модулятора б, Это улучшает передние фронты импульсов, так как импульсы, снятые с фотодиодов, имеют разброс по величине нарастания переднего фронта. С формирователей импульсов 7 импульсы поступают на блок 9 триггеров Шмитта, где импульсы формируются по амплитуде. Выходы восьми триггеров Шмитта подключены ко входу двух диодных дешифраторов 10 и 11, которые переводят записанное в двоичном коде число в десятичное позиционное число. Дешифратор 10 выдает цифры разряда сотых долей миллиметра, дешифратор 11 - разряда деся гых долей миллиметра. Кроме того, дешифраторы имеют дополнительные выходы, предназначенные для включения и выключения системы управления,Переключение подачи по оси Х или У осуществляет девятый триггер блока 9 триггеров Шмитта, с которого снимаются импульсы на 5 10 15 20 25 30 35 40 45 50 4коммутатор 12 выходных цепей. Коммутатор посредством реле подключает двигатели подачи 13 или 14 к усилителю 15 следящей системы. Направление подачи задается коммутатором 1 б знака подачи, представляющим схему совпадения типа И, собранную на двух пентодах. Коммутатор 1 б имеет четыре входа. На один вход с десятого триггера блока 9 триггеров подается сигнал, соответствующий знаку подачи при прямом ходе инструмента, на другой вход - с одиннадцатого триггера блока 9 подается сигнал, соответствующий знаку подачи при обратном ходе инструмента, На два других входа подаются напряжения с анодов триггера 17 Шмитта, который срабатывает при коротких замыканиях искрового промежутка, Триггер 17 Шмитта через усилитель 18 подключен к электродам 19 и 20 электроискровои установки,Выходы дешифраторов 10 и 11 подключены к датчикам положения 21 и 22. Датчик положения 21 выдает координаты по оси Х, а датчик 22 - по оси У, Датчик положения представляют собой фотоэлектрические устройства типа И.Выходы датчиков положения 21 и 22 подключены к логическим схемам типа 23 и 24 И - ИЛИ, каждая из которых собрана на двух пентодах. На первые сетки пентодов поступают сигналы с фотодиодов датчиков, а пентодные сетки управляются девятым триггером блока 9 триггеров Шмитта. Со схем 23 и 24 сигналы поступают на триггеры 2 б и 2 б Шмитта. При совпадении текущей координаты с записанной на ленте триггеры 2 б и 26 Шмитта срабатывают одновременно, вследствие чего матрица - распределитель команд 3 запускает ждущие мультивибраторы 27 (или 28) и 29. Мультивибратор 27 подает импульс длительностью 0,05 сек на усилитель 30 прямого хода перфоленты, управляющий соответствующим электромагнитом в устройстве 31 для перемещения ленты. Мультивибратор 29 генерирует импульс длительностью 0,1 век, который запирает матрицу - распределитель команд, чтобы за время смены кадров не появилось ложных импульсов. Мультивибратор 28 служит для выработки импульсов, управляющих усилителем электромагнита в устройстве 32 обратного хода перфоленты. Для подачи координатных столов ЗЗ и 34 используются малоинерционные двигатели 13 и 14 типа АДПб 2 или ДГ-ЗА. В случае выбора АДПб 2 используются тахогенераторы Зб и Зб типа ТГП-З, имеющие малые моменты трения на валу, Напряжения с тахогенераторов подаются на усилитель 15 следящей системы, Двигатели 13 и 14 посредством понижаю. щих редукторов 37 и 38 вращают винты 39 и 40.Обрабатывающий электрод (проволока) 19 перематывается устройством перемотки 41 и фиксируется устройством 42. Генератор импульсов 43 подает на электроды электрическиеимпульсы, вызывающие эрозию обрабатывае. мой детали,1 хольцевой реверсивный коммутатор 4 собран на двух триггерах 44 и 45 и управляется триггером 17 Шмитта. Матрица - распределитель команд 3 коммутируется реверсивным коммутатором и представляет собой дешифратор на диодах с входами 46, 47, 48, 49, 50, 51, 52 и выходамн 53, 54, 55, 56, 57, 58, 59 и 60. Входы 46, 47, 48, 49 матрицы соединены с анодами триггеров 44 и 45, поэтому потенциалы на выходах матрицы зависят от состояния триггеров. Так как вход 52 матрицы модулируется импульсным напряжением от модулятора 6, на выходах матрицы могут появляться только импульсные напряжения. Если высокие потенциалы подаются на аноды 61 и 62 триггеров 44 и 45, импульсы появляются на выходе 53 матрицы, и запитывается первая группа фотодиодов головки 2. При возникновении короткого замыкания искрового промежутка с триггера 17 Шмитта через линию зазадержки 63 на вход триггера 45 поступает отрицательный запускающий импульс, который переводит триггер в другое устойчивое состояние. При этом импульсы появляются на выходе 54 матрицы, и запитывается вторая группа фотодиодов. Одновременно с триггера 17 Шмитта на клемму 64 кольцевого коммутатора через интегрирующую цепочку 65 подается высокий потенциал, а на клемму 66 - низкий, что соответствует готовности кольцевого коммутатора к переключению в прямом направлении. Если в таком состоянии на вход триггера 45 подавать запускающие импульсы, то будет происходить смена программы в обратном направлении, т. е. импульсы будут появляться последовательно на выходах 54, 55 и 56. После окончания короткого замыкания высокий потенциал через интегрирующую цепочку 67 подается на клемму 66, что соответствует готовности кольцевого коммутатора к переключению в обратном направлении. В этом случае импульсы на выходах матрицы появляются в обратной последовательности - на выходах 56, 55, 54, 53.Если обработка производится по прямой линии, состоящей из нескольких участков, координаты концов которых записаны на ленте, при коротком замыкании головкой 2 будет читаться кадр, соответствующий началу обрабатываемого участка - второй ряд фотодиодов. При достижении электродом этой точки на выходе 59 матрицы появится положительный импульс (от совместного срабатывания45 50 55 5 10 15 20 25 30 35 40 триггеров 25 и 26 Шмитта), задним фронтом которого опрокинется линия задержки 63 и коммутатор будет переведен в состояние, обеспечивающее запитку третьего ряда фотодиодов. При прохождении электродом точки, записанной в этом кадре, аналогично осущестгляется переход на четвертую группу фото- диодов, Если короткое замыкание не прекращается и после этого, дальнейшая смена программы производится путем перемещения ленты в обратном направлении, Для этого с выхода 58 матрицы запускающие импульсы подаются на мультивибратор 28, управляющий устройством д 2 обратного хода перфоленты. В этом случае программа считывается четвертой группой фотодиодов,После ликвидации короткого замыкания посредством линии задержки 68 и триггера 17 Ш митта производится переключение коммутатора, и импульсы появляются на выходе 55 матрицы. Смена программы электрическим путем происходит до тех пор пока считывание не будет производиться первой группой фото- диодов, а затем смена программы будет осуществляться перемещением ленты в прямом направлении.В случае обработки профиля, составленного из отрезков взаимно перпендикулярных прямых, происходит смена программы в обратном направлении на один кадр (переключение на вторую группу фотодиодов). Но так как пре. дыдущий отрезок перпендикулярен обрабаты. ваемому, программа во всех его точках будет выполнена, и на входы 50 и 51 матрицы с вы. ходов триггеров 25 и.26 поступят сигналы на смену программы. На выходе 59 матрицы по. явится сигнал, который с помощью линии задержки 63 переключит коммутатор 4 в сле. дующее положение, т. е. считывание будет производиться третьей группой фотоднодов,Предмет изобретенияСистема программного управления электро- искровой установкой для обработки не профилированным электродом деталей с прямолинейными контурами, параллельными осям координат, с использованием фотодатчиков положения и с записью координат узловых точек на перфоленте, отлачаоцаяся тем, что, с целью осуществления реверса при коротких замыканиях с отводом электрода по пройденной траектории, применена электронная коммутация считывающих фотодиодов с автоматической выборкой соответствующего кадра программы.Шлайн Редак аказ 3435/11 Тираж 425 Формат бум. 60 Х 90/8 Объем 0,49 изЦНИИПИ Комитета по делам изобретений и открытий при СоветеМосква, Центр, пр. Серова, д. 4 ипография, пр. Сапуно
СмотретьЗаявка
864455
К. К. Гулар, Е. В. Гусев
МПК / Метки
МПК: B23H 7/06, B23H 7/20, G05B 19/14
Метки: программного, установкой, электроискровой
Опубликовано: 01.01.1966
Код ссылки
<a href="https://patents.su/4-187502-sistema-programmnogo-upravleniya-ehlektroiskrovojj-ustanovkojj.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления электроискровой установкой</a>
Запоминающий элемент коммутируемой матрицы фотодиодов

Номер патента: 438044
Опубликовано: 30.07.1974
МПК: G11C 11/42
Метки: запоминающий, коммутируемой, матрицы, фотодиодов, элемент
...диода при опросе матрицы,Схема предлагаемого элемента приведенана чертеже.и Элемент состоит из встречно включенныхкоммутиру 1 ощего д 1 Ода 1 и фотоднода 2, анод которого подключен через ши 5 у опроса 3 к формирователю импульсов опроса 4, общему для всех элементов одного столбца матрицы.15 Анод коммутирующего диода 1 через пикнусчитывания 5 подключен к усилителю 6 с пороговым устройством 7, общим для элемсгсов одной строки матрицы. К точке соедипс 1 гпя коммутирующего диода 1 и фотодиода 2 подключен анод дополнительного диода 8, катод которого соединен через шину смещения 9 с источником импульсов смещения 10 и через резисто 1 с источником запира 101 цсго 11 апр 55 ке- ния438044 Предмет изобретения Составитель Р. Яворовская Техред Г....
Устройство для контроля работы технологического оборудования

Номер патента: 1084846
Опубликовано: 07.04.1984
Авторы: Лобачев, Палевский, Тимошенко
МПК: G07C 3/00
Метки: оборудования, работы, технологического
...кантраля, состоя ций из второго триго.:.ра 42 и адиннадца - того элемента И 43, индикатор 44 и второй ключ 45.Устройство работает следующим образом.Генератор 7 на втарам выходе (нижний па схеме) вырабатывает непрерывную последовательность импульсов с частотой следования 1 , Па первом ега выходе (верхний пс схеме) вырабатывается последовательность пачек опросных импульсов са скважнастью, равной двум. Причем частота следования импульсов в пачке равна 1 / 10, а их число равно Ф + И , где Ф равна числу ячеек регистра 19 и соответствует длине передаваемого информационного слова, равного Ю -1, а ц равно числу ячеек регистр" 20 и соответствует числу двоичных разрядов кода адреса рабочего места, равному 11 -1. Частота следования...
Электрогидравлическая цифровая следящая система

Номер патента: 517005
Опубликовано: 05.06.1976
МПК: F15B 21/02, G05B 19/18
Метки: следящая, цифровая, электрогидравлическая
...исключается потеря информации на входе счетчика 4 в случае совпадения во времени импульсов сбратной связи с импульсами программы.Допустим, в исходньй момент времени триггеры реверсивного счетчика находятся в исходном содтоянии;(произведен сброс). При етним вентили 21 22 23, 39 и 27 29 эаЩ)ытыа протйвоположнйе йм ьвентили 21, 22, 23, 40 и 32 34 открытььПотенциальная схема совпадения 35 на четыре входа через схему ььИф -фРЛИь" 37 разрешает прохождениетактовых импульсов с генератора 3 на соответствующие входы триггеров 2526, подтверждая их состояние, которому соответствурт включение электромагнитов цифрового регулятора, управляющего гидродвигатепем, Кроме этого, тактовйе импульсы проходят через импульсно-потенпиальные схемы совпадеаья...
Устройство для передачи информации с вращающегося объекта

Номер патента: 1054684
Опубликовано: 15.11.1983
Авторы: Макаев, Сачивко, Чеченев, Шишонков
МПК: G01D 5/56
Метки: вращающегося, информации, объекта, передачи
...светапричем на первый фотодиод приемника световой сигнал поступает 84 ъчерез зеркальный элемент, установленный на передатчике 2 3Недостатком известного устройства является низкая достоверность передачи .информации вследствие малой частоты ее съема обусловленной зависимостью времени цикла измерения и передачи ин. формации от скорости вращения обьекта, что снижает точность измерения передаваемого параметра.Цель изобретения - повышение точности.Поставленная цель достигается тем, что в устройство для передачи информации с вращающегося объекта, содержащее передатчик, состоящий иэ первого фотодиода, последовательно соединенных измерительного датчика, АЦП и первого светодиода, выход которого подключен к входу приемника,...
Способ управления газоразрядной индикаторной панелью постоянного тока с высокоэмиссионным покрытием на электродах одной из координат

Номер патента: 1786505
Опубликовано: 07.01.1993
Авторы: Глубоков, Ивлюшкин, Милованова, Орлов, Синицын, Шатохин
МПК: G09G 3/28
Метки: высокоэмиссионным, газоразрядной, индикаторной, координат, одной, панелью, покрытием, постоянного, электродах
...срок эффективного использования на ГИП размером 190 х 190 х 5 мм. На анод- высокоэмиссионного покрытия.ные электооды было нанесено высокоэмис- Таким образом; предлагаемый способ сионной покрытие(окись бария толщиной 2 управления ГИП позволяет более чем на мкм), йаполнение йе+ 0-3 Хе, 200 мм рт.ст. 5 40; повысить долговечность панели, в 2 Для включения выбранной ячейки на ее ка-раза снизить статистическое время запазтод подавался импульс напряжения+150 В дывания возникновения разряда и в 1,3 радлительностью 0,2 - 1,5 мкс. В это время на за повысить контраст (за счет снижения ее анод подавался импульс напряжения с яркости паразитного фона вспомогательно- амплитудой -200 - 250 В и такой же длитель го разряда), Все это повышает надежность...
Предыдущий патент: Углеграфитировниьш электрод-инструмент
Следующий патент: 187503
Случайный патент: Устройство для ввода в пневмотранспортную установку сыпучего материала