Трансформаторный датчик перемещений
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 725068 1)5 8 01 В 7/ ИСАНИЕ ИЗОБРЕТЕНИЯ ЕТЕЛЬСТВ ВТОРСКОМ тф толяом известного датчика явл ность измерения, вызванна ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(56) Авторское свидетельство СССРМ 1260664, кл. 6 01 В 7/00, 1981,Авторское свидетельство СССРМ 1252652, кл. 6 01 В 7/00, 1981.(54) ТРАНСФОРМАТОРНЫЙ ДАТЧРЕМЕЩЕНИЙ Изобретение относится к контрольноизмерительной технике и может быть использовано при создании датчиковой аппаратуры, например, для измерения перемещений.Известно устройство, содержащее источник переменного напряжения, преобразователь, масштабирующий контур в виде последовательно включенных фазовращателя и масштабирующего звена, сумматор и фазометр.Известен дифференциально-трансформаторный датчик перемещений, содержащий ферромагнитный сердечник, ферромагнитный якорь, замыкающую ферромагнитную пластину, две секции первичной обмотки, две секции вторичной обмотки, дополнительную секцию вторичной обмотки, два фазосдвигающих контура и фазометр.Недостатк Я- ется низкая точ я(57) Изобретение относится к контрольноизмерительной технике, Цель изобретения - повышение точности. Поставленная цель достигается тем, что в датчик, содержащий трансформаторный преобразователь с двумя парами обмоток возбуждения и измерения, источник переменного напряжения, фазометр, ведены блоки формирования рабочего и опорного сигналов и два сумматора. Повышение точности достигается за счет уменьшения температурной погрешности и увеличения помехоустойчивости за счет исключения влияния изменения фазовых сдвигов питающего напряжения и ухода параметров магнитной системы. 2 ил. большой температурной погрешностью, возникающей вследствие изменения углов сдвига фаз между геометрически суммируемыми рабочими и компенсационными напряжениями от воздействия температуры, электромагнитных наводок и других внешних дестабилизирующих факторов.Цель изобретения - повышение точности измерения перемещений.На фиг. 1 представлена схема датчика с примером выполнения блоков формирования сигналов; на фиг. 2 - векторная диаграмма сигналов.Трансформаторный датчик перемещений (фиг. 1) содержит источник 1 переменного напряжения, трансформаторный датчик 2, включающий ферромагнитный сердечник 3, ферромагнитный якорь 4, связываемый в процессе измерения с контролиоуемым объектом, замыкающую ферромагнитную пластину 5, две секции 6 и 7 обмотки возбуждения, соединенные последовательно-согласно, две секции 8 и 9,измерительной обмотки, соединенные последовательно-встречно. Датчик содержиттакже блок 10 формирования основногоОр(х) и дополнительного Ор.д,(х) рабочих сигналов, блок 11 формирования основного Оои дополнительного Ое.д, опорных сигналов,два сумматора 12 и 13, регистрирующийприбор - фазометр 14.Трансформаторный датчик перемещений работает следующим образом.При подключении секций 6 и 7 обмоткивозбуждения к источнику 1 переменного напряжения в секциях 8 и 9 измерительнойобмотки чувствительного элемента 2 датчика возбуждаются рабочее напряжение Ор(х)и опорное (компенсационное) напряжениеОо соответственно, которые за счет последовательно встречного включения секций 8,9 измерительной обмотки сдвинуты по фазе 20на 180, Рабочее напряжение Ор(х) с выходасекции 8 измерительной обмотки поступаетна вход блока 10 формирования основногои дополнительного рабочих сигналов, в котором формируются основной Ор(х) и дополн ител ь н ы й Ор д. (х) си нусоидал ь н ы есигналы, сдвинутые друг относительно друга по фазе на угол ф, величина которогоустанавливается фазосдвигающей цепью,входящей в состав блока 10, таким образом, 30чтобы угол (180- ф) находился в пределахболее 90 О, но менее 180 (фиг. 2),Выбором величины угла фобеспечивается оптимальная линейность выходной характеристики датчика. 35Опорное напряжение Ое с выхода секции 9 измерительной обмотки поступает навход блока 11 формирования основного идополнительного опорных сигналов, в котором формируется основной Ое и дополнительный Оо.д синусоидальные сигналы,сдвинутые друг относительно друга по фазетак же, как и рабочие сигналы Ор(х) и Ор,д(х)на угол ф. Основной рабочий Ор(х) с выхода"Вых.осн." блока 10 и дополнительный 45опорный Оо,д. сигналы с выхода "Вых,доп,"блока 11 поступают на первый и второй входы сумматора 12 соответственно.Основной опорный Оо с выхода"Вых.осн," блока 11 и дополнительный рабочий Ор,д.(х) сигналы с выхода "Вых,доп,"блока 10 поступают нав первый и второйвходы сумматора 13 соответственно,На сумматоре 12 происходит геометрическое сложение основного рабочего Ор(х) и 55дополнительного опорного Ое,д, сигналов, Свыхода сумматора 12 результирующий сигнал Орез.1 постУпает на пеРвый вхоД (Вх,1)фазометра 14, Р = дгс 19 1 р = агс 19, (2) сов(1 80 1) +где ф, р - текущее значение фазы резуль- тИРУЮЩйХ СУММаРНЫХ СИГНаЛОВ Орез.1, Орез.2 соответственно относительно вектора напряжения питания Опцп-,ф - угол сдвига фаз между основными Ор(х), Ое и дополнительными Ор.д.(х) и Оо,д, сигналами соответственно;Ор(х), Ор.д,(х) - модулированные по амплитуде в функции перемещения основной и дополнительный рабочие сигналы;Оо, Оо,д, - основной и дополнительный опорные сигналы,При изменении модулированных сигналов Ор(х) и Ор,д,(х) на выходах блока 10 в функции перемещения изменяются величиНа И фааа РЕЗУЛЬТИРУЮЩИХ СИГНаЛОВ Орез.1 И Орез. 2 на выходах сумматоров 12 и 13 соответственно, вследствие чего изменяется разность фаз Лр (от значения р , до значения щ) между результирующими сигналами, которая является выходным сигналом данного датчика, регистрируемым фазометром 14.+ агс прибора - ость разми сигная д) =т(х). . 2) индекйства для ствующие выхода регистрирующегометра 14 снимается зависим фаз между результирующи от измеряемого перемещени а векторной диаграмме (фиг1" обозначены сигналы устрорения перемещений, соответ аз нос лами м" На сумматоре 13 происходит геометрическое сложение основного опорного Ое и дополнительного рабочего Ор,д.(х) сигналов. С выхода сумматора 13 результирующий СИГНаЛ Орез.2 ПОСтуПаЕт На. ВтОрсй ВХОД (Вх,2) фазометра 14,При перемещении контролируемого объекта и связанного с ним якоря 4 в направлении увеличения зазора Х обеспечивается модуляция напряжения Ор(х), снимаемого с секции 8 измерительной обмотки, а следовательно, и напряжения Орд(х) Ор(х) а именно сигналы Ор(х) и Ор,д.(х) на выходе блока 10 возрастают.Функция преобразования датчика может быть получена из выражений1725068 фиг Х возбуждения, ферромагнитный сердечник, подвижный ферромагнитный якорь, предназначенный для связи с объектом перемещения,фазометр,отличающийся тем, что, с целью повышения точности измерения, он снабжен блоком формирования основного и дополнительного рабочих сигналов, блоком формирования основного и дополнительного опорных сигналов, первым и вторым сумматорами, выходы которых подключены к сигнальным входам фазометра, входы первого сумматора подключены к основному выходу блока формирования рабочих сигналов и к дополнительному выходу блока формирования опорных сигналов, входы второго сумматора подклю чены к основному выходу блока формирования опорных сигналов и к дополнительному выходу блока формирования рабочих сигналов, входы блоков формирования рабочих и опорных сигналов подключены соответст венно к начальным выводам секций измерительных обмоток, общая точка которых подключены к общему входу фазометра.
СмотретьЗаявка
4726111, 07.08.1990
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ФИЗИЧЕСКИХ ИЗМЕРЕНИЙ
КОНАКОВ НИКОЛАЙ ДМИТРИЕВИЧ, ТРОФИМОВ АНАТОЛИЙ НИКОЛАЕВИЧ, СТОЛЯРОВ ВЯЧЕСЛАВ АНАТОЛЬЕВИЧ, ХАЕВА АНЖЕЛИКА ОЛЕГОВНА
МПК / Метки
МПК: G01B 7/00
Метки: датчик, перемещений, трансформаторный
Опубликовано: 07.04.1992
Код ссылки
<a href="https://patents.su/4-1725068-transformatornyjj-datchik-peremeshhenijj.html" target="_blank" rel="follow" title="База патентов СССР">Трансформаторный датчик перемещений</a>
Устройство для формирования многопозиционных биортогональных шумоподобных сигналов

Номер патента: 1372601
Опубликовано: 07.02.1988
Авторы: Барлабанов, Паламарчук, Улизько, Ушаков
МПК: H03K 3/84
Метки: биортогональных, многопозиционных, сигналов, формирования, шумоподобных
...можно обойтись п=ш- разрядными регистрами 2 и 3 сдвига для получения необходимого ансамбля сигналов.Для увеличения помехоустойчивости прямым и противоположным сигналами передаются соответственно те комбинации информационных импульсов, которые также являются противоположными.Например, если комбинации из пяти информационных импульсов 00000,00001, 00010 передаются сигналами Б 1, Б 2,БЗ, то комбинации 11111, 11110, 11101 передаются сигналами Б 1, Б 2, БЗ. Так как кодовое расстояние между противоположными сигналами наибольшее, то вероятность приема Б 1 вместо Г 1, азначит, и вероятность максимального числа щ ошибок в комбинации информационных импульсов наименьшая. РазбиПение Я=2 комбинаций на прямые и про 5 тивоположные производится...
Устройство прецизионного формирования повторяющихся частотно-модулированных сигналов

Номер патента: 790102
Опубликовано: 23.12.1980
МПК: H03B 23/00
Метки: повторяющихся, прецизионного, сигналов, формирования, частотно-модулированных
...сумматора12, выкоды регистра 15 соединены со.второй группой входов первого комбина 20ционного сумматора 11, а тактирующие .входы и входы установки начальных состояний регистра 15 и обоих блоков 16,17 коррекции подключены к выходам син 25хронизатора 8, соединенного также через, адресный блок 14 с адресными входамиблока 13 памяти.Устройство работает следуюшим абра.зом.ЗО В промежутках между формированиемчастотномодулированных сигналов система фазовой автоподстройки начальнойчастоты, состоящая из эталонного генератора 1, фазового детектора 2, ключа 3,фильтра 4, сумматора 5, управляемогогенератора 6, сводит к нулю напряжениесигнала ошибки на выхоце измерителя 7.В моменты времени 1 а 1 +-)Тпгде "Т - период модуляцйи;- номерЬ4 периода,...
Устройство для формирования дискретных частотно фазоманипулированных сигналов
Номер патента: 1015504
Опубликовано: 30.04.1983
Автор: Лебедев
МПК: H04L 27/12
Метки: дискретных, сигналов, фазоманипулированных, формирования, частотно
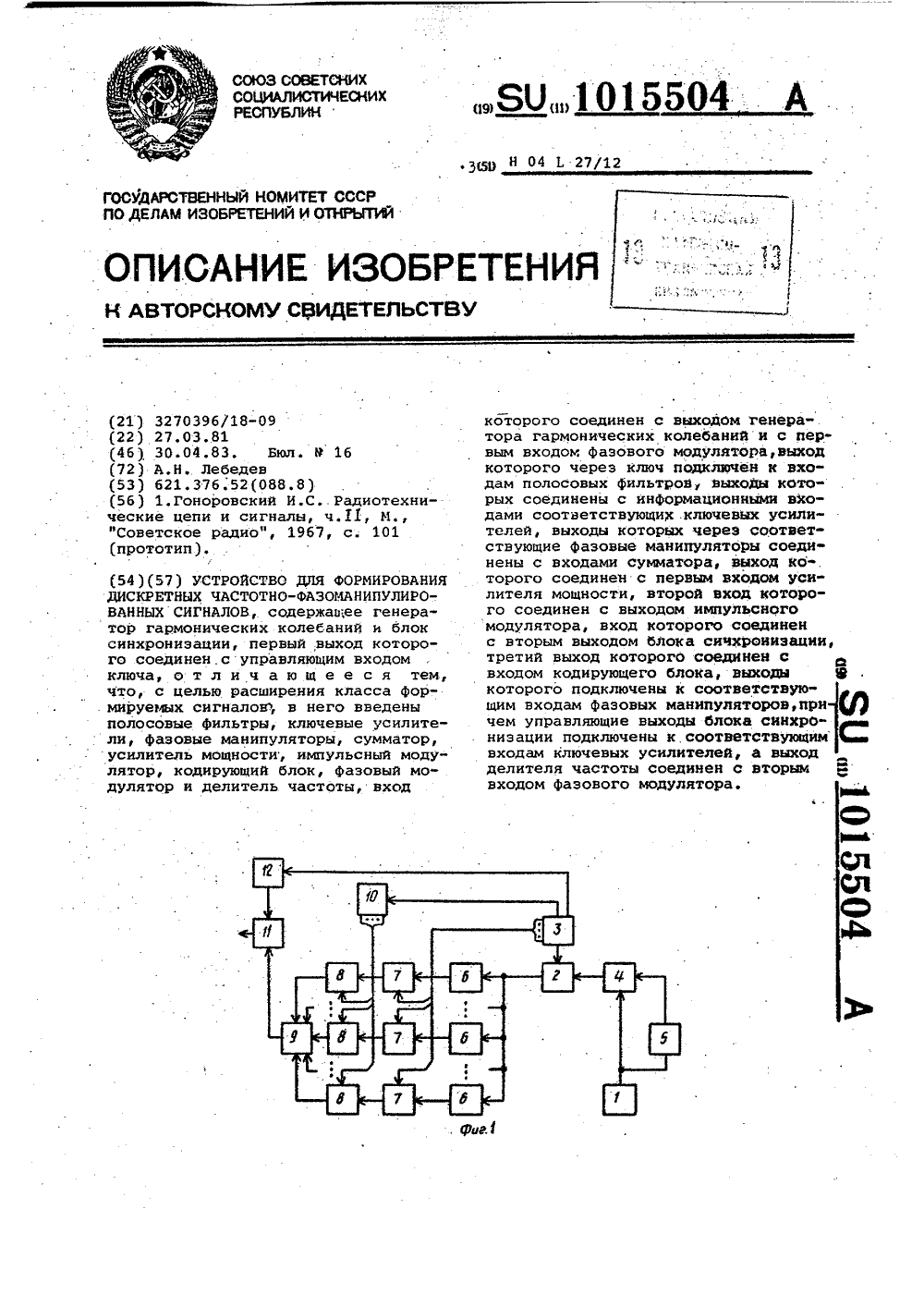
...поступает гармонический сигнал частотой 6 о от генератора 1 гармонически;с колебаний, а на второй - гармонический сигнал с частотой 6 О = 6 О/К (Фиг. 2 а) с выхода делителя 5 частоты. В результате синусоидальной угловой модуляции средней частоты подаваемого от генератора 1 гармонических колебаний сигнала на выходе фазового модулятора 4 имеет место сложное колебание,Е -1)зи)е3Р 1с амплитудно-частотным спектром где 1 Р М) " Функция Бесселя первогорода и-порядка от действительного индекса фазовой модуляции М;д ) - частотная дельта-функция.Индекс фаэовой Модуляции М выбирается таким образом, чтобы в спектре Б(С) присутствовало не менее Х компонент с достаточными амплитудами.При Формировании этого сигнала ключ 2 и все ключевые усилители...
Устройство для формирования последовательностей дискретно частотных сигналов

Номер патента: 1444801
Опубликовано: 15.12.1988
МПК: G06F 1/02
Метки: дискретно, последовательностей, сигналов, формирования, частотных
...умножения единицы на 6;по модулю р; иявляется первым элементом а, мультипликативной группы поля Галуа СР(р.),Мультипликатор 4 вьдает первый элемент а на входы блока 5 через открытые элементы И первой группы элементов И 8 - 8 и элементы ИЛИ 10- 10 . В то же время число а, в двоичном коде поступает на первый входблока1 сумматоров по модулю два,на второй вход которого поступаеткод числа р;. В блоке 11 сумматоровпо модулю два происходит поразрядноесуммирование двоичных чисел без переноса что соответствует вычитаниючисла а,. из рТриггер 7 под воздействием импульса с счетчика б, который считаетпо модулю К, где К - число тактов,45 Формула изобретения Устройство для формирования последовательностей дискретно-частотных сигналов,...
Устройство для формирования последовательностей дискретно частотных сигналов

Номер патента: 1541627
Опубликовано: 07.02.1990
Авторы: Горбенко, Сидоренко, Стасьев, Хударковский
МПК: G06F 1/02
Метки: дискретно, последовательностей, сигналов, формирования, частотных
...установки в исходное состояние на счетчик 1 и регистр 3 и затем в каждый тактовый момент выдает в формирователь 2 код результата умножения. Формирователь 2 формирует остатбк от числа по модулю р, и выдает результат в регистр 3, Последний выдает остаток по модулю на входы мультипликатора 4. Этот остаток результата умножения единицы на 9; по модулю р, и является первым элементом а, мультипликативной группы поля Галуа СР(р,).Мультипликатор 4 выдает первый элемент а, ка входы блока 5 через открытые элементы И 12 -12 третьей группы, элементы И 5 П 1 15,-15 открытые элементыИ 8-8 первой группыи эле" менты ИЛИ 10, -10 . В то же время числа в двоичном коде поступают на первый вход блока 11 сумматоров по модулю1541627 Составитель А....
Предыдущий патент: Резьбовой калибр-кольцо
Следующий патент: Датчик угловых перемещений
Случайный патент: Устройство для управления самоходной сельскохозяйственной машиной