Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
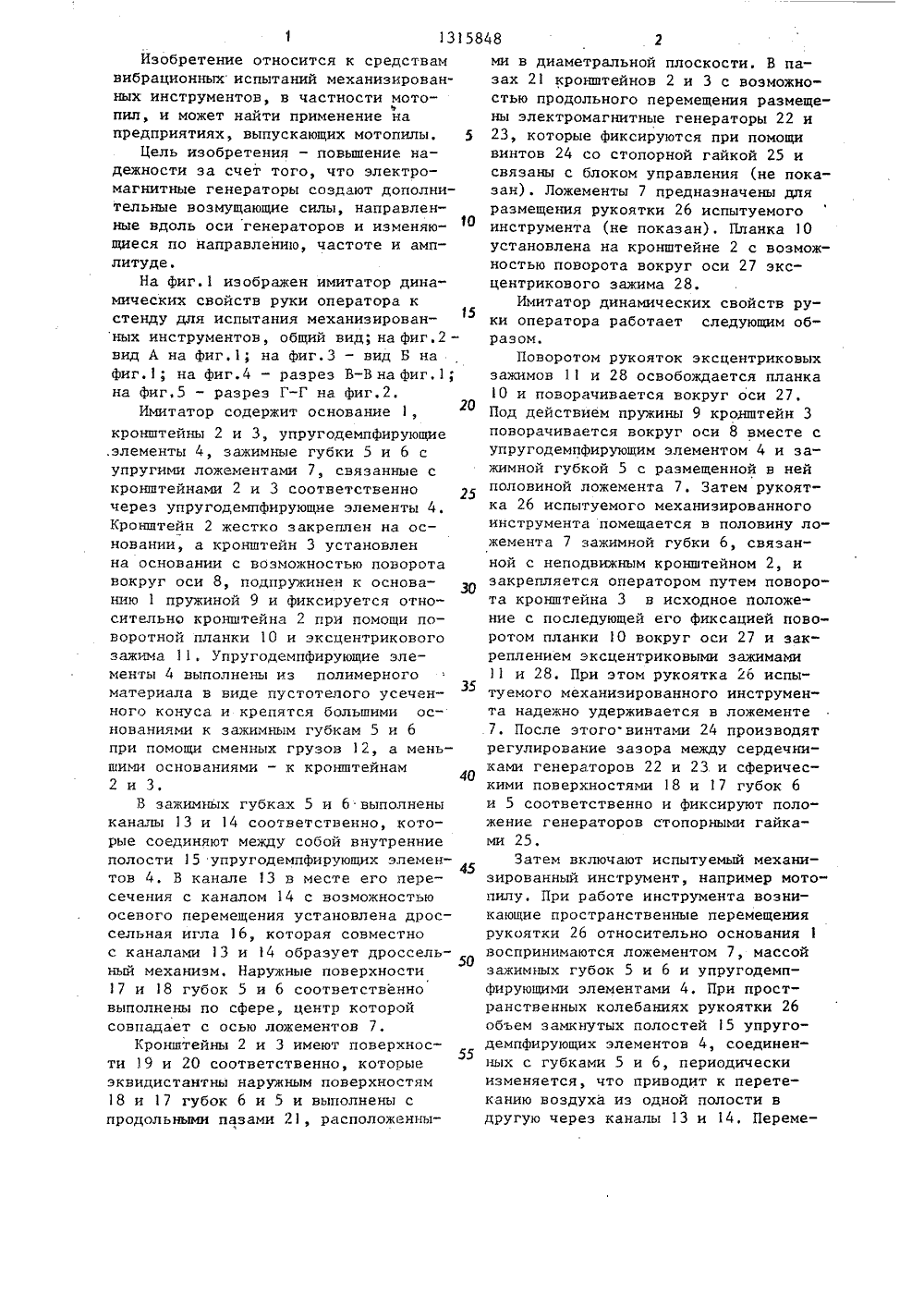
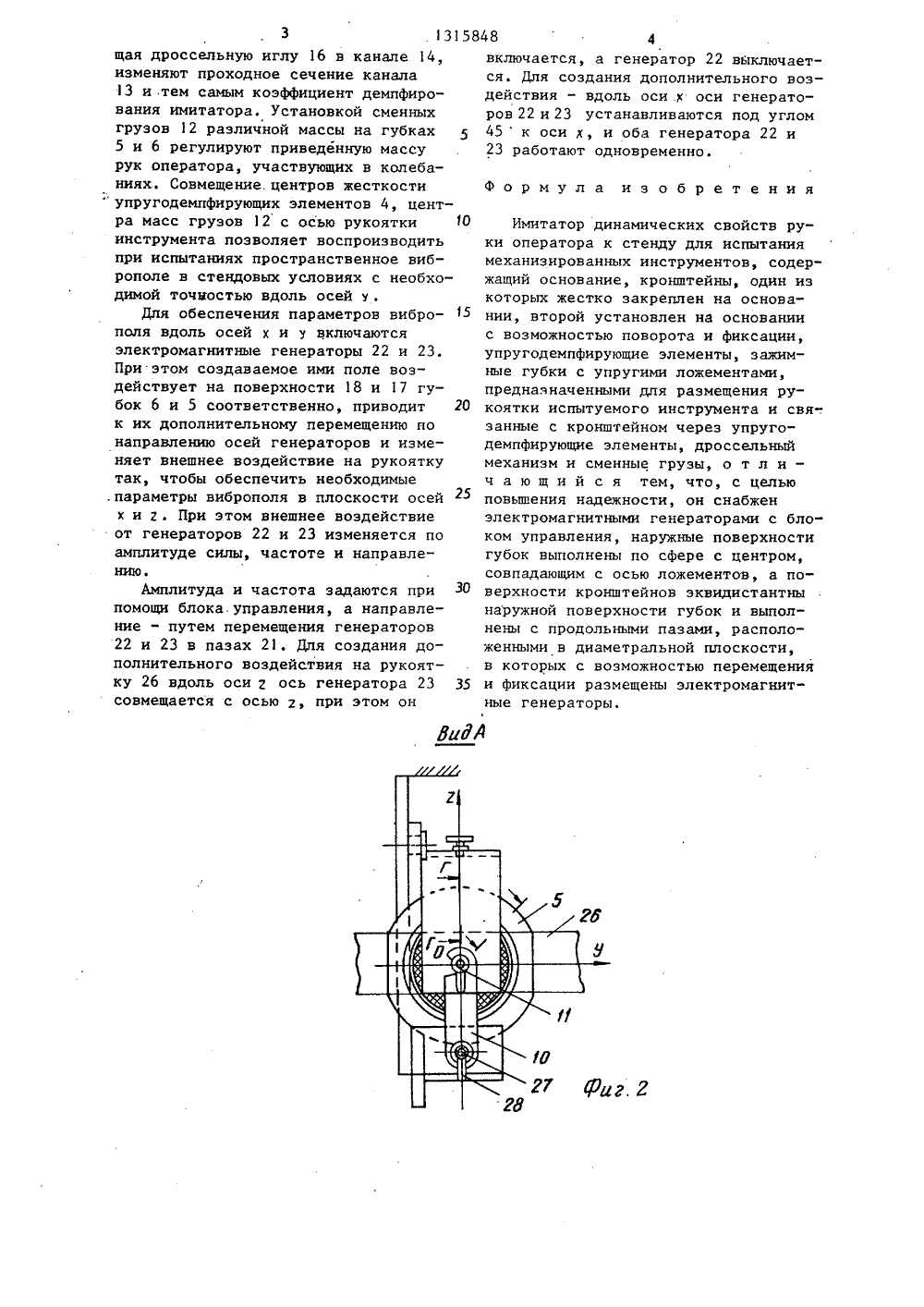
(504 С 0 0 САНИЕ ИЗОБРЕТЕНИЯ У 21ехнический т 8. 8)свидетельствб СССР С 01 М 7/00, 1984. ИМИТАТОР ДИНАМИЧЕС ПЕРАТОРА К СТЕНДУ ХАНИЗИРОВАННЫХ ИН зобретение о брационных и х инструмен КИХ СВОЙС ДЛЯ ИСПЫ СТРУМЕНТО РУКИ 0НИЯ МЕ(57) Ивам вированньтенияра - ддополни тносится кспытаний мтов. Цель едст низи обре надежности имитатоа счет создания. повьппени стигается енераторы для взаимохностью гутельных во я по напра ил изм мущающи ению, стоте и ю А и ОСУДАРСТНЕННЫЙ КОМИТЕТ ССС О ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) АвторскоеУ 1226100, кл. 19 ЯА 1315848 А амплитуде. Имитатор содержит основание 1, кронштейны 2 и 3, упругодемпфирующие элементы 4, зажимные губки5 и 6 с упругими ложементами 7. Наружные поверхности 17 и 18 губок 5 и6 выполнены сферическими, центр ихсовпадает с осью ложемента 7. В губках 5 и 6 выполнены пересекающиесяканалы, которые соединяют между собой полости 15 упругодемпфирующихэлементов 4. В месте пересечения каналов установлена дроссельная игла.Кронштейны 2 и 3 имеют поверхности19 и 20, эквидистантные наружным поверхностям 17 и 18 губок 5 и 6, ипродольные пазы 21. В пазах 21 с воз- аможностью перемещения и фиксации размещены электромагнитные 22 и 23, предназначеннь действия с наружной пов бок 5 6 5 илИзобретение относится к средствам вибрационных испытаний механизированных инструментов, в частности мотоЪ пил, и может найти применение на предприятиях, выпускающих мотопилы,Цель изобретения - повышение надежности за счет того, что электромагнитные генераторы создают дополнительные возмущающие силы, направленные вдоль оси генераторов и изменяющиеся по направлению, частоте и амплитуде.На фиг.1 изображен имитатор дина" мических свойств руки оператора к стенду для испытания механизированных инструментов, общий вид; на фиг.2- вид А на фиг,1; на Фиг.3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг, 1," на фиг,5 - разрез Г-Г на фиг.2.Имитатор содержит основание 1, кронштейны 2 и 3, упругодемпфирующие .элементы 4, зажимные губки 5 и 6 с упругими ложементами 7, связанные с кронштейнами 2 и 3 соответственно через упругодемпфирующие элементы 4, Кронштейн 2 жестко закреплен на основании, а кронштейн 3 установлен на основании с возможностью поворота вокруг оси 8, подпружинен к основанию 1 пружиной 9 и Фиксируется относительно кронштейна 2 при помощи поворотной планки 1 О и эксцентрикового зажима 11. Упругодемпфирующие элементы 4 выполнены из полимерного материала в виде пустотелого усеченного конуса и крепятся большими основаниями к зажимным губкам 5 и 6 при помощи сменных грузов 12, а меньшими основаниями - к кронштейнам 2 и 3.В зажимных губках 5 и 6 выполнены каналы 13 и 14 соответственно, которые соединяют между собой внутренние полости 15 упругодемпфирующих эпементов 4. В канале 3 в месте его пересечения с каналом 14 с возможностью осевого перемещения установлена дроссельная игла 16, которая совместно с каналами 13 и 14 образует дроссельный механизм, Наружные поверхности 17 и 18 губок 5 и 6 соответственно выполнены по сфере, центр которой совпадает с осью ложементов 7.Кронштейны 2 и 3 имеют поверхности 19 и 20 соответственно, которые эквидистантны наружным поверхностям 18 и 17 губок 6 и 5 и выполнены с продольными пазами 21, расположенны 5 Ю 5 г 0 г 5 30 35 40 45 50 55 ми в диаметральной плоскости. В пазах 21 кронштейнов 2 и 3 с возможностью продольного перемещения размеще" ны электромагнитные генераторы 22 и 23, которые фиксируются при помощи винтов 24 со стопорной гайкой 25 и связаны с блоком управления (не показан). Ложементы 7 предназначены для размещения рукоятки 26 испытуемого инструмента (не показан). Планка 1 О установлена на кронштейне 2 с возможностью поворота вокруг оси 27 эксцентрикового зажима 28,Имитатор динамических свойств руки оператора работает следующим образом.Поворотом рукояток эксцентриковых зажимов 11 и 28 освобождается планкаО и поворачивается вокруг оси 27. Под действием пружины 9 кронштейн 3 поворачивается вокруг оси 8 вместе с упругодемпфирующим элементом 4 и зажимной губкой 5 с размещенной в ней половиной ложемента 7. Затем рукоятка 26 испытуемого механизированного инструмента помещается в половину ложемента 7 зажимной губки 6, связанной с неподвижным кронштейном 2, и закрепляется оператором путем поворота кронштейна 3 в исходное положение с последующей его Фиксацией поворотом планки 10 вокруг оси 27 и закреплением эксцентриковыми зажимами 11 и 28. При этом рукоятка 26 испытуемого механизированного инструмента надежно удерживается в ложементе . После этого винтами 24 производят регулирование зазора между сердечниками генераторов 22 и 23 и сферическими поверхностями 18 и 17 губок 6 и 5 соответственно и Фиксируют положение генераторов стопорными гайками 25.Затем включают испытуемый механизированный инструмент, например мото- пилу. При работе инструмента возникающие пространственные перемещения рукоятки 26 относительно основания 1 воспринимаются ложементом 7, массой зажимных губок 5 и б и упругодемпФирующими элементами 4. При пространственных колебаниях рукоятки 26 объем замкнутых полостей 15 упругодемпфирующих элементов 4, соединенных с губками 5 и б, периодически изменяется, что приводит к перетеканию воздуха из одной полости в другую через каналы 13 и 14. Переме8484включается, а генератор 22 выключается. Для создания дополнительного воздействия - вдоль оси Х оси генераторов 22 и 23 устанавливаются под углом 45к оси х, и оба генератора 22 и 23 работают одновременно. 3 1315 щая дроссельную иглу 16 в канале 14, изменяют проходное сечение канала 13 и .тем самым коэффициент демпфирования имитатора. Установкой сменных грузов 12 различной массы на губках 5 и 6 регулируют приведенную массу рук оператора, участвующих в колебаниях. Совмещение центров жесткости " упругодемпфирующих элементов 4, центра масс грузов 12 с осью рукоятки 10 инструмента позволяет воспроизводить при испытаниях пространственное виброполе в стендовых условиях с необходимой точностью вдоль осей у .Для обеспечения параметров вибро поля вдоль осей у и у включаются электромагнитные генераторы 22 и 23. При этом создаваемое ими поле воздействует на поверхности 18 и 17 губок 6 и 5 соответственно, приводит 20 к их дополнительному перемещению по направлению осей генераторов и изменяет внешнее воздействие на рукоятку так, чтобы обеспечить необходимые .Параметры виброполя в плоскости Осей 25х и г . При этом внешнее воздействие от генераторов 22 и 23 изменяется по амплитуде силы, частоте и направлению еАмплитуда и частота задаются при 30 помощи блока. управления, а направление - путем перемещения генераторов 22 и 23 в пазах 21. Для создания дополнительного воздействия на рукоятку 26 вдоль оси 2 ось генератора 23 35 совмещается с осью 2, при этом он Формула изобретения Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов, содержащий основание, кронштейны, один из которых жестко закреплен на основании, второй установлен на основании с возможностью поворота и фиксации, упругодемпфирующие элементы, зажимные губки с упругими ложементами, предназначенными для размещения рукоятки испытуемого инструмента и свя-. занные с кронштейном через упругодемпфирующие элементы, дроссельный механизм и сменные грузы, о т л и - ч а ю щ и й с я тем, что, с целью повышения надежности, он снабжен электромагнитными генераторами с блоком управления, наружные поверхности губок выполнены по сфере с центром, совпадающим с осью ложементов, а поверхности кронштейнов эквидистантны наружной поверхности губок и выполнены с продольными пазами, расположенными в диаметральной плоскости, в которых с воэможностью перемещения и фиксации размещены электромагнитные генераторы.1315848 Г оставитель Ю.Сергееехред Л.Кравчук орректор С,Шекм Редактор О.Юрковецк каз 2352/4 ВНИИНИ по дела13035, М 4 наб.,полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 роизводств Тираж 776сударственного комитм изобретений и откросква, Ж, Раушска Подпис ета СССР тий
СмотретьЗаявка
3728223, 16.04.1984
ПЕРМСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
КЕЛЛЕР ЭРНСТ АЛЕКСАНДРОВИЧ, ШЕВЕЛЕВ ПАНТЕЛЕЙМОН ВАСИЛЬЕВИЧ, ПУЗЫРЕВ ОЛЕГ НИКОЛАЕВИЧ
МПК / Метки
МПК: G01M 7/00
Метки: динамических, имитатор, инструментов, испытания, механизированных, оператора, руки, свойств, стенду
Опубликовано: 07.06.1987
Код ссылки
<a href="https://patents.su/4-1315848-imitator-dinamicheskikh-svojjstv-ruki-operatora-k-stendu-dlya-ispytaniya-mekhanizirovannykh-instrumentov.html" target="_blank" rel="follow" title="База патентов СССР">Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов</a>
Станок для обработки сферических поверхностей оптических деталей трубчатым инструментом

Номер патента: 240494
Опубликовано: 01.01.1969
МПК: B24B 11/00
Метки: инструментом, оптических, поверхностей, станок, сферических, трубчатым
...резания состоитиз полуццлиндра 12, закрепленного на шпинделе инструмента, сегментной рамы 13, которая установлена на осц полуццлицдра ц мо 5 жет разворачиваться относительно последнего. Кожух 14, закрывающий шпиндель инструмента, установлен на станине станка и имеет шахтное отверстие, в которое входит сегментная рама.л Положение шпинделя изделия относительнотрубчатого режущего инструмента определяется подвижным упором 5, имеющим резьбовое отверстие ц выступ, взаимодействующийс упором 2. Это позволяет выводить цз зоныобработки шпиндель изделия с помощью гцдроццлиндра 10, не нарушая настройки станка,Подвижной упор 5 перемещается вращением винта, Для зажима поворотного шпинделяинструмента масло под давлением подается0 в штоковую полость...
Способ обработки поверхности детали обкатывающим деформирующим инструментом и устройство для обработки детали

Номер патента: 1255406
Опубликовано: 07.09.1986
МПК: B24B 39/00
Метки: детали, деформирующим, инструментом, обкатывающим, поверхности
...детали обкатывающим инструментом состоит,в том, что ось инструмента уста.навливают под углом к оси обрабатываемойповерхности детали и сообщают инструменту качательное движение относительно центра качания, который помещают на оси обрабатываемой поверхности, и подачу, при этом центра качания выносят за пределы обрабатываемой поверхности, а оси инструмента 30сообщают движение по образующей конуса с вершиной в центре качания,причем расстояние от центра качаниядо геометрического центра инструментаопределяют из выражения 35Р-усово1,=+ - = 2 зпы фгде Ь - расстояние от центра качаниядо геометрического центраинструмента, мм; 40Р - диаметр детали, мм;д - рабочий диаметр инструмента, мм;6 - угол наклона оси инструментак оси обрабатываемой...
Считывающий элемент для преобразователя перемещение-код

Номер патента: 442502
Опубликовано: 05.09.1974
Автор: Домрачев
МПК: G08C 9/04
Метки: перемещение-код, преобразователя, считывающий, элемент
...состоит из трехстержневого магнитопровода 1, крайние стержни 2и 3 которого по ширине равны величине деления кодирующей дорожки 4 и удалены один10 от другого, считая по линиям, проходящимчерез середины их ширины, на нечетное числоделений кодирующей дорожки, а среднийстержень 5 расположен посередине междукрайними стержнями 2 и 3 и по ширине равен15 четному числу деления кодирующей дорожки.Магнитопровод 1 расположен в плоскости,параллельной направлению перемещения кодирующей дорожки 4 с некоторым зазором относительно этой дорожки. На среднем стержне20 5 размещена первичная обмотка 6, подключенная к источнику питания 7. Вторичные обмотки 8 и 9 расположены на крайних стержнях2 и 3 и соединены одна с другой последовательно и встречно.25...
Инструмент для установки крепежных элементов

Номер патента: 912037
Опубликовано: 07.03.1982
Автор: Арне
МПК: B25B 21/00
Метки: инструмент, крепежных, установки, элементов
...охватывающей реэьбовой конец 9 наружной части 8 шпинделя 1 реэьбовой втулки 11 и регулировочного кольца 12, эакреплявмого на наружной части 8 шпинделя 1 и выполненного с наруж" ной резьбой 13 для осевого перемещения резьбовой втулки 11, торцовая поверхность которой при работе упирается в наружную резьбу 13 изделия 2037 4 14; и вращение инструмента прекраща.ется. Это очень важно при эавертывании крепежного элемента 5 в отверстие изделия 14, так как перекручивание крепежного элемента 5 приводитк срыву резьбы, образованной в отверстии бетонного изделия 14 крепежным элементом 5Наружная часть 8шпинделя 1 имеет резьбовой конец 9 с ненарезанной короткой цилиндрической поверхностью 15, на которую присборке инструмента...
Устройство для шлифования рабочих поверхностей зубьев сложного инструмента

Номер патента: 1393527
Опубликовано: 07.05.1988
МПК: B23B 5/42
Метки: зубьев, инструмента, поверхностей, рабочих, сложного, шлифования
...от величины и направления угла наклонавинтовых стружечных канавок обрабатываемого инструмента, а также от величины и направления угла наклона основных витков его. Если в устройстве для шлифования рабочих поверхностей зубьев сложного инструмента барабан 14 управления с винтовыми вырезами 15 на его рабочей поверхцости 13, то при расчете величины Фцктивного числа стружечных канавок следует учитывать величину и направление угла наклона винтовых вырезов 15.Ось вращения 0 -0 ролика 12 отстоит от оси вращения барабана на расстоянии, опредсляемом по за- висимости с 1 ь - йЕ +д21 1 О где Й. - диаметр барабана управления,"др - диаметр ролика,Ь - величина сближения поверхностей барабана и роликапод действием усилия прижатия за счет упругих...
Предыдущий патент: Полуавтомат для контроля герметичности замкнутых изделий
Следующий патент: Способ определения присоединенной массы самоходного плавсредства
Случайный патент: Устройство для направления цепи конвейера