Устройство для программного управления виброзагрузочным бункером
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
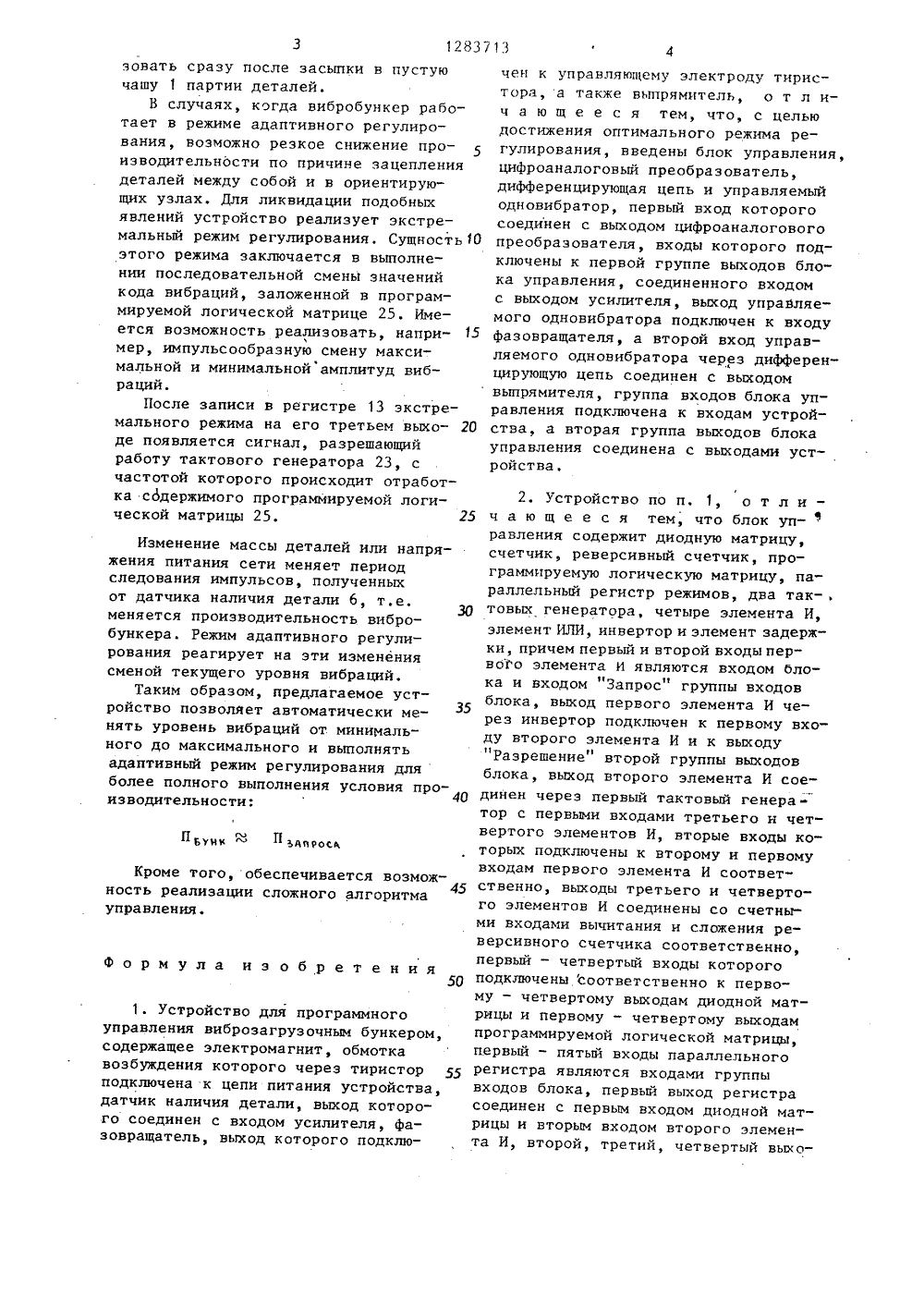
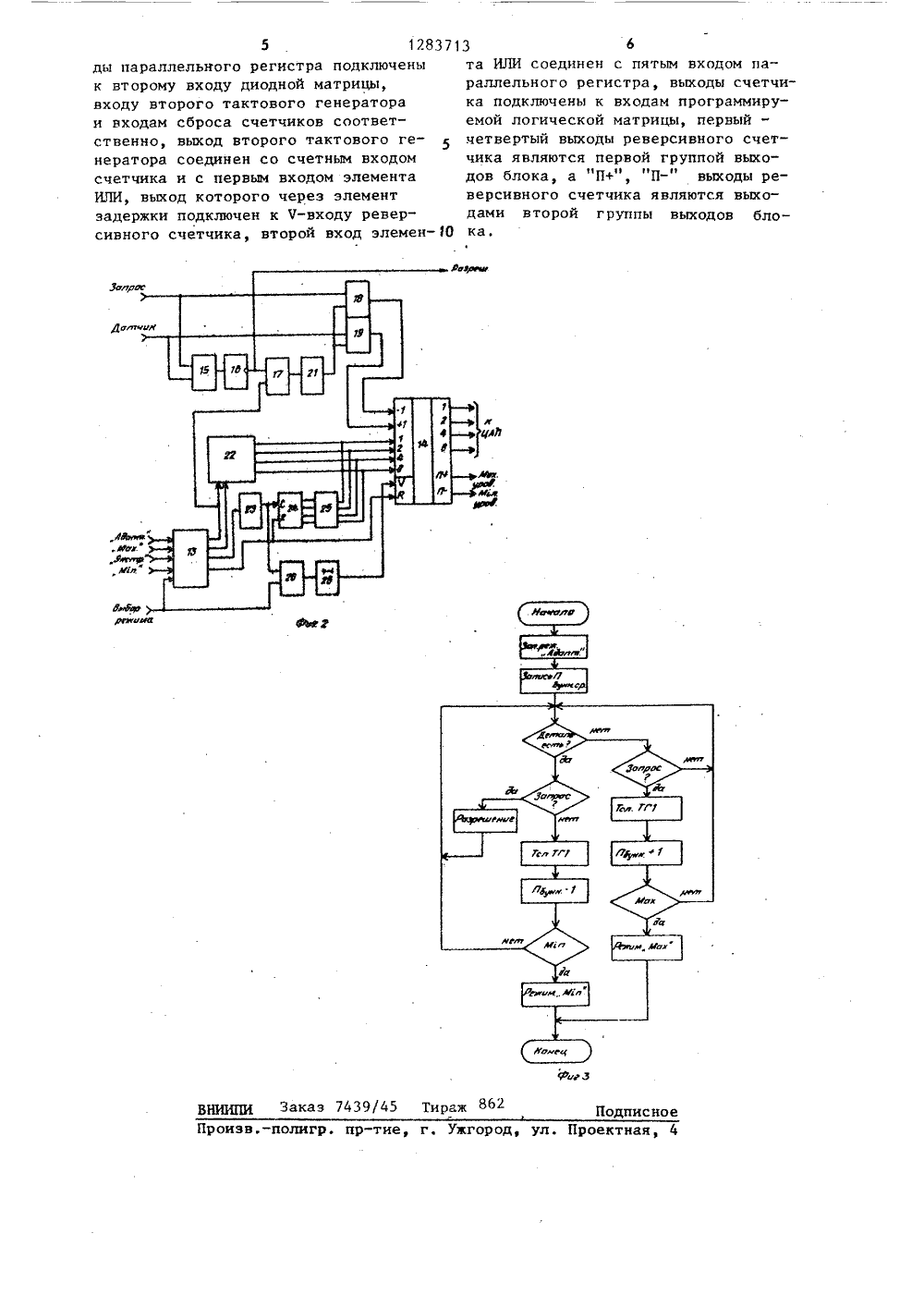
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН 8012837 9 02 ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 4 бъеОКЕРОМтомаов и ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Рижское производственноединение ВЭФ им. В.И. Ленина. (56) Авторское свидетельство СУ 751733, кл. В 65 С 27/00, 19Авторское свидетельство СССВ 772805, кл. В 23 Я 7/00, 197(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОУПРАВЛЕНИЯ ВИБРОЗАГРУЗОЧНЫМ БУ(57) Изобретение относится к атизации технологических процес позволяет достичь оптимальный режимрегулирования. Для этого в устройство введены блок управления 8, цифроаналоговыйпреобразователь 9,одновибратор10, дифференцирующая цепь 11 . Устр ойство может работать в следующиХ режимах:адаптивном максимальном, минимальноми экстремальном. Изменение массы деталей в чаще 1 или напряжения сетименяет период следования импульсов,полученных от датчика наличия дета"ли 6. Режим адаптивного регулирования реагирует на эти изменения сменой текущего уровня вибраций. 1 з.п,ф лы 3 ил.Изобретение относится к автоматизации технологических процессов и может найти применение для управления виброзагрузочными устройствами, работающими в составе гибких автоматизированных систем.Целью изобретения является достижение оптимального режима регулирования,На фиг. 1 представлена функциональная схема устройства; на фиг. 2 -схема блока управления; на фиг, 3 -алгоритм работы устройства.Устройство для программного управления виброзагрузочным бункером содержит чашу 1, жестко связанную с якорем 2 электромагнита, обмотка возбуждения 3 которого подключена к сетипитания через тиристор 4, фазовращатель 5, датчик наличия детали 6,соединенный с входом усилителяблок управления 8, выходы которогосвязаны с цифроаналоговым преобразователем 9, соединенным с управляемымодновибратором 10, дифференцирующуюцепь 11, подключенную к выпрямителю 12.Блок управления 8 (фиг. 2) содержит параллельный регистр 13, реверсивный счетчик 14, первый элементИ 15, инвертор 16, второй, третий ичетвертый элементы И 17- 19, элементИЛИ 20, первый тактирующий генератор21, диодную матрицу 22, второй тактирующий генератор 23, счетчик 24, 35программируемую логическую матрицу25, элемент задержки 26. Устройство для программного управления виброзагрузочным бункером ра ботает следующим образом.В чашу 1 загружается порция деталей и устройство подключается к сети питающего напряжения.От систем управления верхнего 45 уровня (не показаны) на группу входов блока управления 8 поступает информация о режиме работы. Устройство может работать в одном из следующих режимов: адаптивном, максимальном, минимальном и экстремальном. Навход "Выбор режима" блока управления 8 подается сигнал "0" выбора режима, который поступает в параллельный регистр 13 и разрешает запись информации о выбранном режиме работы.При работе в адаптивном режиме на первом выходе параллельного регистра 13 появляется уровень логической на остальных выходах - логический"0", Уровень логическая "1" поступает на первый вход диодной матрицы22 и второй вход второго элементаИ 17. На выходах диодной матрицы 22появляется двоичный код, соответствующий среднему уровню вибраций и поступает на 1-4 входы реверсивногосчетчика 14, Сигнал "Выбор режима"через второй элемент ИЛИ 20 и элемент задержки 26 воздействует на7-вход реверсивного счетчика 14 и записывает в него код среднего уровнявибраций.С выходов реверсивного счетчика14 код через цифроаналоговый преобразователь 9, управляемый одновибратор 10, фазовращатель 5 и тиристор 4воздействует на обмотку возбуждения3 и вызывает колебания, т.е, работувиброзагрузочного устройства со сред-,ней производительностью.Далее сигнал от датчика наличиядетали 6 о результатах "Виброзагрузки" и сигнал "Запрос" поступаютна входы "Датчик" и "Запрос" блокауправления 8 и взаимодействуют черезпервый элемент И 15, инвертор 16,элементы И 1- 19 и первый тактирующий генератор 21, затем поступают насчетные входы "-1" и "+1" реверсивного счетчика 14. При этом увеличивается или уменьшается амплитудаколебаний чаши 1 с деталями, как этоизображено в алгоритме адаптивногоуправления на фиг. 3,Первый тактирующий генератор 21 при несовпадении сигналов Датчик" и "Запрос" вырабатывает последовательность прямоугольных импульсов, период следования которых установлен равным среднему ритму работы связанного с бункером оборудования, забирающего из него детали,При совпадении сигналов "Запрося и "Наличие детали" вырабатывается сигнал "Разрешение".При минимальном режиме работы отсутствуют колебания виброзагрузочного устройства. Этот режим действует в случаях, когда связанное с вибробункером оборудование, например промышленный робот в течение определенного времени не запрашивает детали.В максимальном режиме производительность виброзагрузочного устройства максимальна, Этот режим можно исполь 1283713зовать сразу после засыпки в пустую чашу 1 партии деталей.Б случаях, когда вибробункер работает в режиме адаптивного регулирования, возможно резкое снижение производительности по причине зацепления деталей между собой и в ориентирующих узлах. Для ликвидации подобных явлений устройство реализует экстремальный режим регулирования. Сущность 10 этого режима заключается в выполнении последовательной смены значений кода вибраций, заложенной в программируемой логической матрице 25. Имеется возможность реализовать, напри мер, импульсообразную смену максимальной и минимальной амплитуд вибраций.После записи в регистре 13 экстремального режима на его третьем выхо де появляется сигнал, разрешающий работу тактового генератора 23, с частотой которого происходит отработка с 6 держимого программируемой логической матрицы 25. 25 оэП ьунк П змРоск Кроме того обеспечивается возможФ45ность реализации сложного алгоритмауправления. Формула и э обретения50 1. Устройство для программного управления виброзагрузочным бункером, содержащее электромагнит, обмотка возбуждения которого через тиристор подключена к цепи питания устройства, датчик наличия детали, выход которого соединен с входом усилителя, фазовращатель, выход которого подклюИзменение массы деталей или напряжения питания сети меняет период следования импульсов, полученных от датчика наличия детали 6, т.е.меняется производительность вибробункера. Режим адаптивного регулирования реагирует на эти изменения сменой текущего уровня вибраций.Таким образом, предлагаемое устройство позволяет автоматически менять уровень вибраций от минимального до максимального и выполнять адаптивный режим регулирования для более полного выполнения условия про 40 изводительности: чен к управляющему электроду тиристора, а также выпрямитель, о т л ич а ю щ е е с я тем, что, с цельюдостижения оптимального режима регулирования, введены блок управления,цифроаналоговый преобразователь,дифференцирующая цепь и управляемыйодновибратор, первый вход которогосоединен с выходом цифроаналоговогопреобразователя, входы которого подключены к первой группе выходов блока управления, соединенного входомс выходом усилителя, выход управляемого одновибратора подключен к входуфазовращателя, а второй вход управляемого одновибратора через дифференцирующую цепь соединен с выходомвыпрямителя, группа входов блока управления подключена к входам устройства, а вторая группа выходов блокауправления соединена с выходами устройства,2, Устроиство по п. 1, о т л и - ч а ю щ е е с я тем, что блок уп-равления содержит диодную матрицу, счетчик, реверсивный счетчик, программируемую логическую матрицу, параллельный регистр режимов, два так-, товых генератора, четыре элемента И, элемент ИЛИ, инвертор и элемент задержки, причем первый и второй входы первого элемента И являются входом блока и входом Запрос" группы входов блока, выход первого элемента И через инвертор подключен к первому входу второго элемента И и к выходу "Разрешение второй группы выходов блока, выход второго элемента И соединен через первый тактовый генератор с первыми входами третьего и четвертого элементов И, вторые входы которых подключены к второму и первому входам первого элемента И соответственно, выходы третьего и четвертого элементов И соединены со счетными входами вычитания и сложения реверсивного счетчика соответственно, первый - четвертый входы которого подключены соответственно к первому - четвертому выходам диодной матрицы и первому - четвертому выходам программируемой логической матрицы, первый - пятый входы параллельного регистра являются входами группы входов блока, первый выход регистра соединен с первым входом диодной матрицы и вторым входом второго элемента И, второй, третий, четвертый выхо12837 До аказ 7439/45 Тираж Подписное НИИПИ роизв.-полигр. пр-тие, г, Ужгород, ул. Проектна ды параллельного регистра подключенык второму входу диодной матрицы,входу второго тактового генератораи входам сброса счетчиков соответственно, выход второго тактового генератора соединен со счетным входомсчетчика и с первым входом элементаИЛИ, выход которого через элементзадержки подключен к Ч-входу реверсивного счетчика, второй вход элемен 3 бта ИЛИ соединен с пятым входом параллельного регистра, выходы счетчика подключены к входам программируемой логической матрицы, первыйнетвертый выходы реверсивного счетчика являются первой группой выходов блока, а "П+", "П-" выходы реверсивного счетчика являются выходами второй группы выходов блока.
СмотретьЗаявка
3924325, 04.07.1985
РИЖСКОЕ ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ВЭФ ИМ. В. И. ЛЕНИНА
СТРОДС ВАЛДИС ЯЗЕПОВИЧ, РОЛОВ МИХАИЛ ПЕСАХОВИЧ
МПК / Метки
МПК: G05B 19/02
Метки: бункером, виброзагрузочным, программного
Опубликовано: 15.01.1987
Код ссылки
<a href="https://patents.su/4-1283713-ustrojjstvo-dlya-programmnogo-upravleniya-vibrozagruzochnym-bunkerom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления виброзагрузочным бункером</a>
Блок коррекции развертки для устройства считывания графической информации

Номер патента: 1310861
Опубликовано: 15.05.1987
Авторы: Купреев, Павленко, Шаройко
МПК: G06K 11/00, G06K 7/14
Метки: блок, графической, информации, коррекции, развертки, считывания, устройства
...входах счетчика. Запись указанного кода в счетчик 4 осуществляется импульсом, поступающим на его вход предварительной установки с выхода элемента 6 ИЛИ.Код числа Р формируется узлом 3 задания толщины носителя, представляющего собой комбинационный преобразователь. Он может быть выполнен с использованием микросхем мультиплексоров. Управление узлом 3 задания толщины носителя осуществляется с помощью входящих в его состав органов ручного управления.Код числа Р передается на информационные входы счетчика 4 импульсов через преобразователь 8 кода,Преобразователь 8 кодов при наличии сигнала на его втором (управляющем) входе осуществляет обращение кода числа Р.При отсутствии управляющего сигнала преобразователь кода передает число Р без...
Устройство для обращения матриц

Номер патента: 1527643
Опубликовано: 07.12.1989
Авторы: Лиходед, Седухин, Соболевский, Якуш
МПК: G06F 17/16
...состоянии регистры 1 О зуют матрицу (и+1(и, операционные11 и 24-26 и триггеры 12, 13 и 29- блоки первой и второй групп распо 32 устанавливаются в нулевое состоя- ложены в позициях соответственноние. )5 (1 З)-х и (2,1)-х Ц 1,п; д.=2 п),региНа нулевом такте на вход 1, пода- стгы расположеныв позициях (и+1,3)-хвоется и)-разрядный элемент ан и допол- )-й информационный вход устройстванительные (и)+1)-й разряд 1 и (в+2)-й подключен к первому информационномуразряд О, При этом в операционном входу Ц, 1)-го операционного блоблоке 2, в регистр 11 записывается 20 ка, первый информационный вход (1,элемент а , р)-го операционного блока (1 2,пНа первом такте на вход 1( подается р=1,п) подключен к первому инфорэлемент а, (ш+1)-й разряд 0 и...
Устройство преобразования весов входов

Номер патента: 1058064
Опубликовано: 30.11.1983
Автор: Музыченко
МПК: H03K 19/23
Метки: весов, входов, преобразования
...весов. выходов, выходы которых являются выходами данного преобразователя несов входов, а входы преобраэователей весов выходов соединены с выходами одного веса преобразователей весов.Преобразователи весов содержат преобразователи весов нходов и фор О мирователй веса выхода, входы которых соединены с выходами преобразователей весов входов, входы которых являются входами данного преобразователя весов, а выходы формиронателей весов выходов являются вы. - ходами преобразователя весов.На фиг.1 показана структурная схема предлагаемого устройства; на фиг.2 и 3 примеры реализации схемы на элементах И и ИЛИ для преобразователей весов на два и три выхода соответственно,Устройство преобразователя весов входов содержит преобразователи 1 весов...
Устройство для опроса входов программируемого контроллера

Номер патента: 1718184
Опубликовано: 07.03.1992
Авторы: Ерошенко, Шахназаров
МПК: G05B 19/18
Метки: входов, контроллера, опроса, программируемого
...соединен с выходом первого блока памяти данных, второй блок памяти данных, адресные входы которого соединены с соответствующими входами первого блока памяти данных и соответствующими адресными входами мультиплексора и подключены к соответствующим адресным выходам программируемого контроллера, второй запоминающий элемент, информационный вход которого соединен с выходом второго блока памяти данных, первый выход синхронизации программируемого контроллера подключен к входам выборки первого и второго блоков памяти данных, второй выход синхронизации соединен с входом записи первого и второго запоминающих элементов, а третий выход синхронизации подключен к входу управления записью-считыванием первого блока памяти данных, содержит элемент...
Весоизмерительное устройство

Номер патента: 838396
Опубликовано: 15.06.1981
Авторы: Быстрова, Гальченко, Кузнецова, Платонов, Полунов, Фуфаев
МПК: G01G 23/36
Метки: весоизмерительное
...из режима слежения за изменением сигнала с тензодатчиков.Вторая схема И выполняет роль 60ключа и вместе со счетчиком участвуетв формировании длительности временивыдержки.На чертеже представлена блок-схема весоизмерительного устройства. Весоизмерительное устройство содержит весоизмерительные тензодатчики 1, аналого-цифровой преобразователь 2, состоящий из узла 3 сравнения, преобразователь 4 код-напряжение, генератор 5 импульсов и реверсивного счетчика б, схему 7 переписки кода, блок 8 управления, сумматор 9, регистрирующий прибор: 10,дополнительные и-разрядные преобразователи 11 код-напряжение, и-разрядные счетчики 12 импульсов, формирователь 13, две схемы И на два входа каждая - 14 (вторая) и 15 (первая) и счетчик 16,Устройство...
Предыдущий патент: Система управления электроприводом
Следующий патент: Логический блок для управления исполнительным механизмом
Случайный патент: Устройство для определения углеводородных потерь при испарении