Устройство для измерения углов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 1 ОПИСАНИЕ ИЗОБРЕТЕНИ цЙВБщ ;",); ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ(57) Изобретение относится к устройствам для управления процессами гибки. Оно и позволяет с большей точностью измерять углы загиба деталей.Устройство содержит в корпусе 1 подвижный штырь 2, уравновешенный балансировочным грузиком 3. На подвижном штыре жестко закреплены два дат"чика 9 и 10 линейных перемещений,оси которых параллельны оси подвижУ 47ена Трудовогоордена Дружбый институт В. Сос)тельство СССР Р 5/14, 17. 12 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ(71) Казанский орКрасного Знаменинародов авиационним.А.Н,Туполева1278061 ного штыря, а их подвижные щупы 11и 12 уперты в поворотный Фиксатор 8,который шарнирно закреплен на подвижном штыре. Поворотный Фиксаторвыполнен симметричным относительнооси штыря, Датчики 9 и 10 также симметрично расположены относительнооси штыря. Свободный конец заготовкипосле выхода из валков перемещает Изобретение относится к устройствам для управления процессом гибки,в частности к устройствам измеренияуглов загиба деталей в процессе ихгибки на листогибочных машинах. 5Цель изобретения - повышение точности измерения углов эа счет исключения давления щупа на заготовку.На Фиг, 1 изображено предлагаемоеустройство для замера углов и один 1 Оиз возможных вариантов установки егона гибочном оборудовании - на двухвалковой листогибочной машине с эластичным покрытием валка; на Фиг. 2 разрез А-А на фиг, 1; на фиг. 3 - 15вид Б на фиг. 2.В устройстве для измерения углов в вертикальных каналах П-образного паза корпуса 1 установлены подвижный штырь 2 и балансировочный грузик 3, 20 связанные перекинутой через блочное колесо 4 гибкой нитью 5, К штырю 2, установленному в канале корпуса 1 в направляющих роликах 6 для жесткой его координации и свободного его 25 перемещения относительно корпуса 1, прикреплен к нижнему концу, выполненному в виде П-образной вилки, шарнирно осью 7 поворотный фиксатор 8. Симметрично оси штыря 2 датчики 9 и 10 3 О линейных перемещений, подвижные щупы 11 и 12 которых параллельны оси штыря 2 и уперты в фиксатор 8 своими концами, снабженными контактными с воэможностью свободного вращения шариками 13. Датчики 9 и 10 жестко крепятся в П-образной вилке подвижного штыря, Монтажными винтами 14 корпус 1 устройства для измерения углов крепится к траверсе 15, в которой установлен в роликовых опорах 16 верхний жесткий гибочный валок 17 вверх и поворачивает Фиксатор 8 относительно оси 7 на угол загиба, Приповороте фиксатора щупы 11 и 12 датчиков 9 и 10 перемещаются. Данныеперемещения щупов Фиксируются датчиками и преобразуются затем в угловыеперемещения Фиксатора относительногоризонта на простой геометрическойзависимости. 1 з,п, ф-лы, 3 ил. 2так, чтобы каналы П-образного пазабыли расположены вертикально, чтообеспечивает нормальный ход штыря,Для обеспечения более широкого применения устройства, например длязамера углов при гибке коническихдеталей, в поворотном фиксаторе 8устройства для непосредственного контакта по точкам с измеряемой поверхностью могут быть установлены поконцам два контактных шарика 18 и 19с возможностью свободного вращения.Для обеспечения приведения поворотного фиксатора 8 в начальное положение (вывод из зоны гибки) в стенкиканала установки балансировочногогрузика 3 устройства для измеренияуглов вмонтирована электромагнитнаякатушка 20, подсоединенная через выключатель 21 к источнику 22 постоянного электрического тока.Устройство может быть использовано при замере угла гибки деталей налистогибочной машине с двумя валками,верхний из которых 17 - жесткий, анижний 23 выполнен с эластичным покрытйем, а между ними подается заготовка 24,Работа устройства, установленногона двухвалковой листогибочной машинес эластичным покрытием нижнего валка,при гибке листовых деталей осуществляется следующим образом.Перед гибкой заготовка 24 (плоскийлист) устанавливается горизонтальнона нижнем валке 23, поворотный фиксагор 8 устройства для измерения угловопускается посредством перемещенияштыря 2 по вертикали в направляющих роликах 6 под действием минимально установленного с помощью выбора веса балансировочного грузика 3 инерционного30 усилия да контакта с заготовкой, После этого заготовка изгибается путем внедрения верхнего валка 17 с загатовкой 24 в эластичное покрытие нижнего валка 23. При этом свободный 5 конец заготовки 24 перемещается под действием изгибающих усилий в зоне гибки до момента их уравновешивания внутренними усилиями, возникающими в заготовке, образуя с горизонтом угол загиба Ф , определяемый глубиной внедрения верхнего валка 17 с заготовкой 24 в эластичное покрытие валка 23 и физико-механическими и геометрическими параметрами заготовки.Перемещаясь вверх, свободный конец заготовки 24 перемещает поворотный фиксатор 8 устройства для измерения углов, при этом штырь 2 вертикально перемещается вверх от действия на него через шарнирное закрепление фиксатора, а сам Фиксатор 8 поворачивается относительно шарнирного закрепления (оси 7) на угол, соответствующий углу загиба Р свободного конца заготовки, так как линия касания заготовки и Фиксатора (контактных шариков 18 и 19) лежит на плоской поверхности свободного (неизогнутого) конца заготовки 24.При повороте фиксатора 8 относительно оси 7 щупы 11 и 12 датчиков 9 и 10 линейных перемещений соответственно перемещаются под действи- З 5 ем на них фиксатора 8 внутрь корпуса (щуп 11) и наружу (щуп 12) своих датчиков, причем ввиду симметричности установки датчиков 9 и 10 параллельно и на одинаковом расстоянии до 40 оси штыря 2 в плане, Данные перемещения щупов фиксируются датчиками 9 и 10 и преобразуются затем в угловые перемещения фиксатора 8 относительно горизонта по простой геометрической зависимости 1 Р = агсед Нс-е) /(а+Ь),где а, Ь - расстояние от щупов 11 и 12 50да аси штыря 2 поворота фиксатора 8 в плане (да плоскости, прохбдящейчерез ось штыря 2 и ась 7поворота Фиксатора 8); 55с, е - зафиксированное перемещение щупов 11 и 12 датчиками 9 и 10 соответственно. Из формулы видно, чта ввиду постоянства суммы (а + Ь) (в данком случае а = Ь - датчики установлены относительно штыря 2 симметрично и жестко) величина Т 8 У линейно зависит только от показаний датчиков (с - е), что говорит о стабильности точности измерения углов на всем диапазоне измерения предлагаемым устройством, зависящим только от точности измерения используемых датчиков 9 и 10. Кроме того, так как установлено для датчика и разность (с - е) представляет относительную сумму зафиксированных ими линейных отклонений, то практически точность удваивается (так как перемещения щупов с и е (их величины) берутся со своим знаком - если пере.ещение щупа наружу относительно корпуса датчика +" если внутрьПри этом не требуется большая точность установления датчиков 9 и 10 относительно фиксатора 8, кроме как обеспечение параллельности их щупов и одинаковости расстояния до оси штыря 2 в плане, так как используются относительные показания датчиков (разнасть их показаний).Установление цатчиков на равном расстоянии да аси штыря 2 обеспечивает взаимное уравнавешивание усилий давления щупов 11 и 12 датчиков на фиксатор 8 относительна осц 7 креплекия ега к штырю 2, чта устраняет появление дополнительных усилий от фиксатора 8 ка свободный конец цзгибаемой заготовки при повороте фиксатора в процессе гибки заготовки, тем самым повышая точность измерения.Предлагаемое устройство для измерения углов повышает точность и стабильность измерений. Изготовление его пра"то. Если, например, использовать электромеханические датчики, та их показания можно преобразовать в значения углов загиба при исполь зовании, например, отечественного аналого-цифрового прибора типа Щ, имеющего индикаторное цифровое габло и выходной канал для передачи сгейерираванного сигнала в двоична-десятичном коде.Внедрение изобретения на гибочных машинах типа КГЛ, ГЛС, ЛГМ, ЛГМЗ, ГЛП и других аналогичной конструкции значительна повысит точность гибки, снизит трудоемкость даводачных рабат,12780 б 1 5позволит автоматизировать процессгибки. формула из обре те ния Видб 15 79 8 2 ф ставитель Е. Шхред В. Кадар Редактор А. Козориз ректор М, Самб з 6789/ Тираж 783 ВНИИПИ Государственного коми по делам изобретений и от 113035, Москва, Ж, Раушскаяодлисное ета СССРрытийаб д, 4 зводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 1. Устройство для измерения углов гибки деталей преимущественно к гибочным машинам, содержащее поворотный фиксатор для контакта с поверхностью изгибаемой детали, шарнирно связанный с подвижным уравновешенным штырем, с размещенным на нем датчиком линейных. перемещений, подвижный щуп которого установлен с возможностью взаимодействия с поворотным фиксатором, о тл и ч а ю щ е е с я тем, что, с целью повышения точности измеренияуглов. за счет исключения давлениящупа на заготовку, поворотный фиксатор установлен симметрично относительно оси его крепления к штырю,прп этом устройство снабжено дополнительным датчиком линейных перемещений со щупом, оба датчика закреплены на подвижном штыре жестко.и 10 симметрично его оси, а их щупы параллельны этой оси.2. Устройство по п. 1, о т л ич а ю щ е е с я тем, что концы щупов снабжены контактными шариками, 5 установленными с возможностью свободного вращения.
СмотретьЗаявка
3924053, 09.07.1985
КАЗАНСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ И ОРДЕНА ДРУЖБЫ НАРОДОВ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. А. Н. ТУПОЛЕВА
МАРТЬЯНОВ АЛЕКСАНДР ГЕННАДЬЕВИЧ, СОСОВ НИКОЛАЙ ВЕНИАМИНОВИЧ, ШАПАЕВ ИВАН ИВАНОВИЧ
МПК / Метки
Метки: углов
Опубликовано: 23.12.1986
Код ссылки
<a href="https://patents.su/4-1278061-ustrojjstvo-dlya-izmereniya-uglov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для измерения углов</a>
Датчик угла наклона подвижного объекта

Номер патента: 1737272
Опубликовано: 30.05.1992
МПК: G01C 9/16
Метки: датчик, наклона, объекта, подвижного, угла
...инерционной рамы, первая 4 и вторая 5 части которой, соединенные с одинаковыми грузами 6, установлены с возможностью вращения вокруг оси, совмещенной с осью жесткого стержня, с которыми они связаны через введенные идентичные пружины 7, а узел формирования информации о наклоне выполнен в виде первого индуктивного преобразователя 8, расположенного по оси вращения маятника, и второго индуктивного преобразователя 9, расположенного по оси вращения частей разрезной инерционной рамы. Первый и второй индуктивные преобразователи состоят из статора и ротора. Статор первого индуктивного преобразователя жестко закреплен с корпусом датчика, а ротор - с осью вращения маятника с жестким стержнем, Статор второго индуктивного преобразователя жестко...
Устройство к круглошлифовальному станку для быстрого подвода шлифовального круга к заготовке и регулирования положения относительно ее оси губок упорного люнета

Номер патента: 126756
Опубликовано: 01.01.1960
Автор: Цофин
МПК: B23Q 1/76, B24B 47/20
Метки: быстрого, губок, заготовке, круга, круглошлифовальному, люнета, оси, относительно, подвода, положения, станку, упорного, шлифовального
...11 работает вместе с отсчетным устройством 12, имеющим стрелку 13, перемещающуюся по шкале, и служащим для управления переключением режимов работы станка при шлифовании. К оси стрелки 13 присоединен вращающийся трансформатор 14, служащий датчиком для вращающихся трансформаторов 9 и 15.Для быстрого подвода к заготовке шлифовального круга с определенным зазором, не зависящим от припуска заготовки, на удлиненный вертикальный вал 1 б насаживают червячную шестерню 17, связанную с ним электромагнитной муфтой 18. Червячная шестерня 17 зацепляется с червяком 19, вращаемым электродвигателем 20; кроме того, через пару шестерен 21 она связана с вращающимся трансформатором 15. Электромагнитную муфту 18 отключают при ручной поперечной подаче.При...
Датчик линейных перемещений к устройству для измерения прямолинейности

Номер патента: 357461
Опубликовано: 01.01.1972
МПК: G01B 7/34
Метки: датчик, линейных, перемещений, прямолинейности, устройству
...зазоры размещались навстречу друг другу в,плоскости, перпендикулярной направлению натяжения струны 2.Струна выполняет роль эталона прямой липни и источника переменного магнитного поля, по ней проходит ток высокой частоты.11 я сердечника., расположены измерительные 1 ятушки 3 индуктивцости, В которых мягнитным полем струны наводится э.д.с. Катушки сосд 1 тнсны между собой по дифференциальной схеме. Параллельно каждой из катушек подключень коидснсагоры 4, образующие с катушками .Олебательцые Оптуры, настроенные на частоту тока, протекающего по струне.В измерительную схем датчика входят диоды 5, явля 1 ощисся амплитудными детекторами, и фильтры нижних частот, состоящие из конденсаторов 6 и резисторов 7.При размещении струны с током в...
Датчик определения угла положения в пространстве координатных осей телп относительно источника света
Номер патента: 625134
Опубликовано: 25.09.1978
Авторы: Глиберман, Летин, Пименов, Тюркин
МПК: G01B 19/56
Метки: датчик, источника, координатных, осей, относительно, положения, пространстве, света, телп, угла
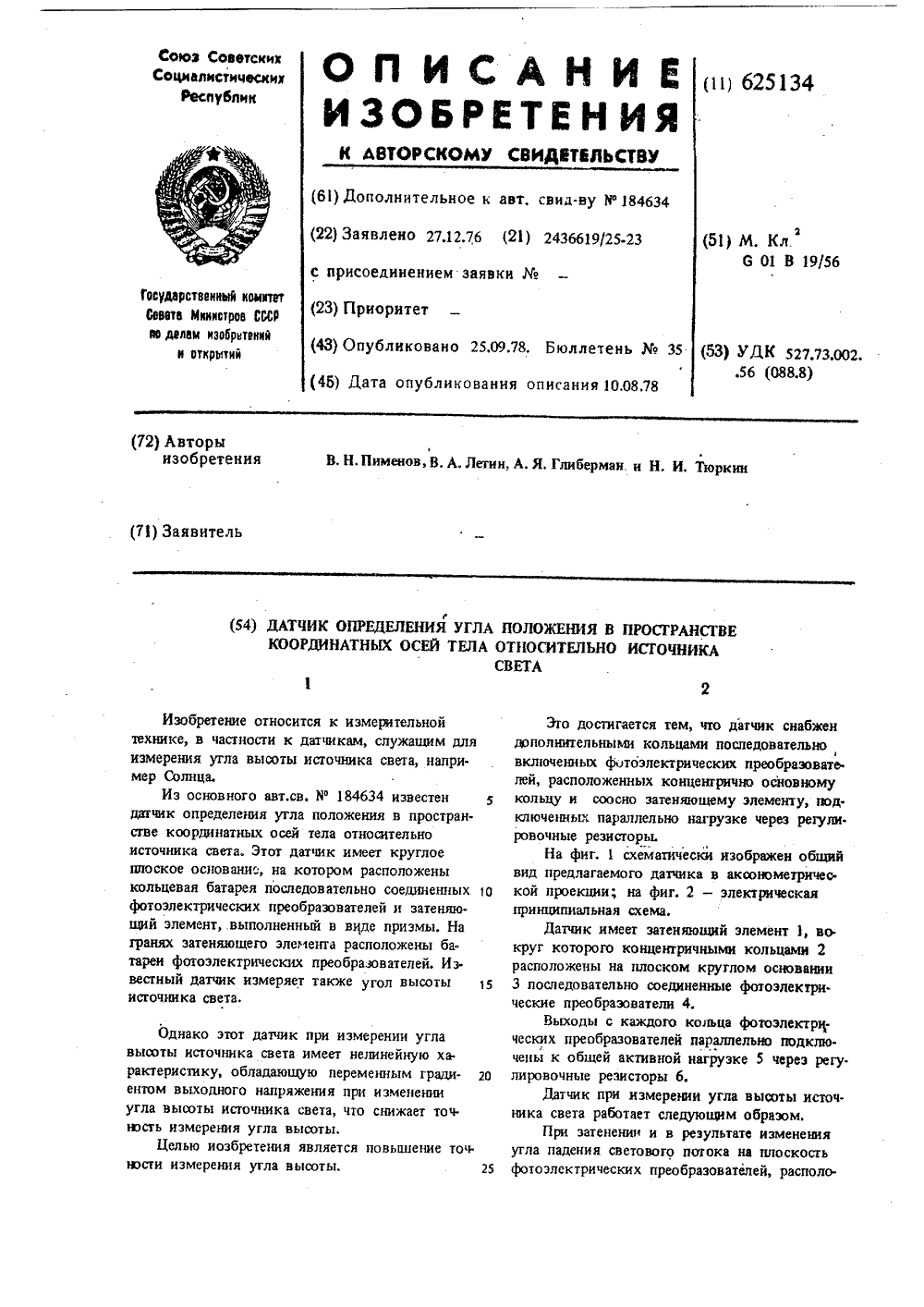
...резисторы.На фиг, 1 схематически изображен общийвид предлагаемого датчика в аксонометрической проекции; на фиг. 2 - электрическаяпринципиальная схема.Датчик имеет затеняющий элемент 1, вокруг которого концентричными кольцами 2расположены на плоском круглом основании3 последовательно соединенные фотоэлектри.ческие преобразователи 4,Выходы с каждого кольца фотоэлектрических преобразователей параллельно подключены к общей активной нагрузке 5 через регу.лировочные резисторы 6,Датчик при измерении угла высоты источ.ника света работает следующим образом.При затенении и в результате измененияугла падения светового потока на плоскостьфотоэлектрических преобразователей, располо.авниых по кольцамнаосновании, происходит пропорциональное...
Фиксатор угла поворота

Номер патента: 1339911
Опубликовано: 23.09.1987
Авторы: Викторов, Комолов, Симкин
Метки: поворота, угла, фиксатор
...с эксцентриком 5.При использовании фиксатора встойках радиоэлектронной аппаратурыфункции основания 1 фиксатора выполняет корпус выдвижного блока 8, шарнирно соединенного с осью 9, на одном конце которой жестко закрепляютдиск 2, а на другом - палзун 10,установленный с возможностью перемещения в пазу 11 каркаса стойки 12,Фиксатор угла поворота работаетследующим образом.Предварительно, учитывая конкретные условия эксплуатации, жесткосоединяют с поворачиваемым объектомлибо диск 2, либо основание 1, приэтом другую часть фиксатора (основание или диск) закрепляют неподвижно,после чего осуществляют поворот объекта. При этом в процессе поворота вначальный момент выступы 7 пружины6 выходят из впадин 3 диска 2, с которыми они находились во...
Предыдущий патент: Валковая листогибочная машина
Следующий патент: Станок для гибки труб
Случайный патент: Устройство для последовательного исправления ошибок