Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
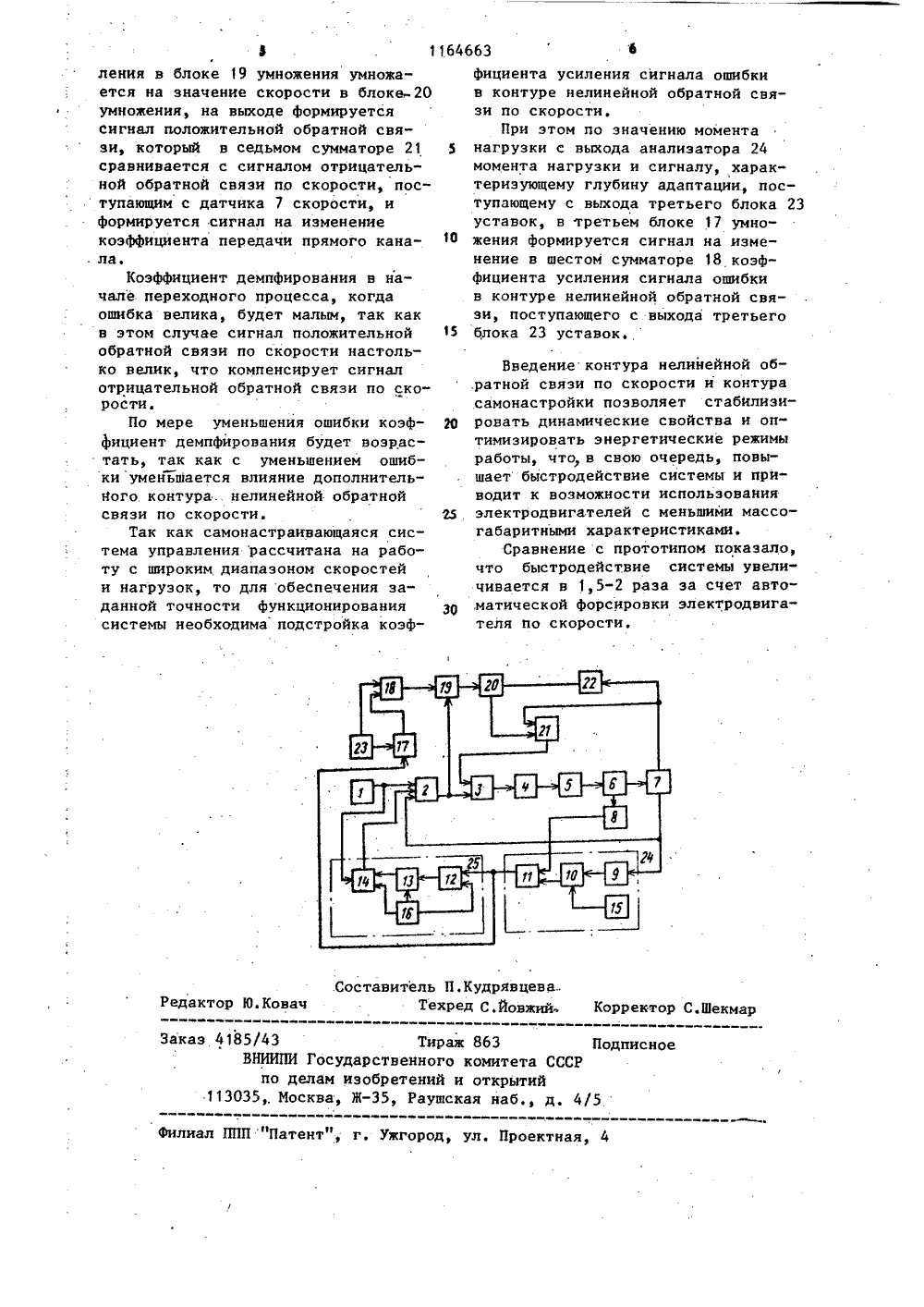
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН 4(51) б 05 В 13/02,Т СССРТНРЫТИЙ ИЗОБРЕТЕНИИДЕТЕЛЬСТВУ ОПИСА К АВТОРСКО(71) Московский о ТрудовогоКрасного Знамени коинструментальный институт(56) 1. Авторское свидетельство СССРо заявке У 3549917,кл. 6 05 В 13/02, 1983.2. Ьашарин А.В. и др. Упреэлектроприводами.Л., Энергои1982.,с. 311 (прототип).(54)(57) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМАУПРАВЕНИЯ; содержащая последовательно соединенные задающее устройство,первый и второй сумматоры, регуляторскорости и усилитель мощности, электродвигатель с Датчиком тока и датчиком скорости, выход которого соединен с вторым входом первого сум матора ,а выход усилителя мощностисоединен с входом электродвигателя,о т л и ч а ю щ а я с я тем, что, .с целью повышения быстродействия .системы при малых моментах нагрузки, в нее введены последовательносоединенные блок диФференцирования,первый блок умножения, третий сумматор, четвертый сумматор, второйблок умножения и пятый сумматор,первый и .второй блоки уставок, поси Т.И рдена стан п авлениздат,ОСУДАРСТВЕННЫЙ НОМИ О ДЕЛАМ ИЗОБРЕТЕНИЙ 801164663 А ледовательно соединенные третин блок умножения, шестой сумматор, четвертый блок умножения, пятый блок умножения и седьмой сумматор, инвертор и третий блок уставок, причем въиод первого блока уставок соеди-. нен с вторым входом первого блока умножения, первый выход второго блока уставок подключен к второму входу пятого сумматора, второй выход - к второму входу второго блока умножения, а третий выход - к второму входу четвертого сумматора, пер вый выход третьего блока уставок соединен с первым входом третьего блока умножения, а второй выходс вторйм входом шестого сумматора, второй вход третьего блока умножения подключен к выходу третьего сум;матора, второй вход которого соеди нен с выходом датчика тока, третий вход пятого сумматора соединен с выходом задающего устройства, выход пятого сумматора подключен к третье-, му входу первого сумматора, выходкоторого соединен с вторым входомчетвертого блока умножения, второй вход седьмого сумматора соединен с выходом датчика скорости и входом инвертора, подключенного выходом к второму входу пятого блока умножения, а вы" ход седьмого сумматора соединен с вторым входом второго сумматора.1 . 116466Изобретение относится к классусамонастраивающихся систем и можетбыть использовано в робототехникедля автоматического управления электроприводами манипуляционных роьотов, обладающих. переменнымипараметрами объекта управления,Известна система управления, вкоторой обеспечение переходного процесса без перерегулирования осу Оществляется путем введения дополнительной нелинейной обратной связипо скорости. ри этом улучшение переходного процесса в системе происходит путем изменения коэффициента 15демпфирования в течение переходногопроцесса .13.Наиболее близкой к предлагаемой потехнической сущности является самонастраивающаяся система управления, 2 Осодержащая последовательно соединенные задающее устройство, первый ивторой сумматоры, регулятор скорости, тиристорный преобразователь,электродвигатель, датчик скорости, 25выход которого соединен с вторым входом первого сумматора и датчик тока 2 .Однако известные системы управления имеют низкое быстродействиевслед- ЗОствие недостаточно полного использования энергетических воэможностеиэлектродвигателя при малых моментахнагрузки,уставок 1 причем выход первого блокауставок соединен с вторым входомпервого блока умножения, первыйвыход второго блока уставок подключен к второму входу пятого сумматора, второй выход - к второму входувторого блока умножения, а третийвыход - к второму входу четвертогосумматора, первый выход третьегоблока уставок соединен с первымвходом третьего блока умножения,а второй выход - с вторым входомшестого сумматора, второй вход третьего блока умножения подключен квыходу третьего сумматора, второйвход которого соединен с выходомдатчика тока, третий вход пятогосумматора соединен с выходомзадающего устройства, выход пятого сумматора подключен к третьему входупервого сумматора, выход которогосоединен с вторым входом четвертого блока умножения, второй входседьмого сумматора соединен с выходом датчика скорости и входом инвертора, выходом подключенного квторому входу пятого блока умножения,а выход седьмого сумматора соединен с вторым входом второго сумматораНа чертеже приведена структурная схема предлагаемой самонастраивающейся системы управления,Самонастраивающаяся система управления содержит задающее устройство1, первый сумматор 2, второй сумматор 3, регулятор 4 скорости, усилитель 5 мощности, выполненный ввиде тиристорного преобразователя,электродвигатель 6, датчик 1 скорости, датчик 8 тока, блок 9 дифференцирования, первый блок 10 умножения,третий сумматор 11, четвертый сумматор 12, второй блок 13 умножения,пятый сумматор 14, первый и второй.блоки 15 и 16 уставок, третий блок 17умножения, шестой сумматор 18, четвертый блок 19 умножения, пятыйблок 20 умножения, седьмой сумматор21, инвертор 22 и третий блок 23 уставок. Цель изобретения - повышение35 быстродействия системы при малых моментах нагрузки.Поставленная цель достигается тем, что в самонастраивающуюся систему управления, содержащую последовательное соединенные задающее устройство, первый и второй сумматоры, регулятор скорости и усилитель мощности, электродвигатель с датчиками скорости и тока, выход датчика скорости соединен с вторым входом первого сумматора, а выход усилителя мощности соединен с входом электродвигателя, введены последовательно соединенные блок дифференцирования, 5 О первый блок умножения, третий сумматор, четвертый сумматор, второй блок умножения и пятый сумматор, первый ивторой блоки уставок, последовательно соединенные третий блок умножения 55 шестой сумматор, четвертый блок умножения, пятый блок умножения и седьмой сумматор, инвертор и третий блок Блоки 9, 10, 11 и 15 образуют анализатор 24 момента нагрузки,Блоки 12,13, 14, и 16 образуют устройство 25 самонастройки. Система работает следующим образом.3 1164663 4Предварительно на выходе первого В качестве критерия оптимизацииблока 15 уставок, выполненного на скоРости по энергетическим возможпотенциометре, выставляется сигнал, костям используется нагрузочнаяравный значению приведенного к валу характеристика с учетом коэффициендвигателя момента инерции (расчет-та форсировки по скорости электроные данные), на выходах второго. бло- Двигателя 6, что позволяет повыситька 16 уставок, выполненного на побыстродействие системы.тенциометрах, выставляются сигналы, При этом сигнал, соответствующийравные максимально допустимому мо- моменту нагрузки, поступает на входменту нагрузки, жесткости механичес четвертого сумматора 12, где сравни-:кой характеристики, значению скорос- вается с сигналом соответствующимФти при максимальной нагрузке электро- максимально допустимой нагрузке элекдвигателя (паспортные данные электро- тродвигателя, поступающим с второгодвигателя), на выходах третьего блока блока 16 уставок, На выходе четвер 23 уставок, выполненного на потенцио" 15 того сумматора формируется сигнал,метрах, выставляются сигнал, равный ,равный разности моментов, который,минимальному значению коэффициента во втором блоке 13 умножения умйо-сигнала ошибки в контуре нелинейной жается на сигнал, поступающий с выобратной связи,и сигнал, характери- хода второго блока 16 уставок хаФзующий глубину его адаптации при иэ-. 1 О рактеризующий жесткость механименении момента нагрузки экспери- ческой характеристики. С выхода,ментальные данные). второго блока 13 умножения сигнал9управляющий сигнал по скорости с соответствующий изменению скоростивыхода задающего устройства 1 пос- при изменении нагрузки отмаксимальтупает на первый сумматор 2,где срав ного до текущего значения поступаетнивается с сигналом, соответствующим . на вход пятого сумматора, где склатекущему значению скорости, поступа- . дывается с сигналом характеризуУющему с выхода датчика 7 скорости. ющим значение скорости при макси-.На вход первого сумматсра 2 постУ-мально допустимой нагрузке и сравпает дополнительный сигнал, форми- Зб нивается с сигналом задания по скоруемый контуром самонастройки, рости, постуяающим с выхода задаКонтур самонастройки производит ющего устройства 1,оценку момента нагрузки и определяет Таким образом,. на выходе устрой-.оптимальное по энергетическим воз-. ства самонастройки формируется сигможностям электродвигателя значение нал на изменение задания по скор с 35задания по скоросскорости. При этом, в анализаторе 24 ти, чем обеспечивается выход на опмомента нагрузки по значению ускоре- тимальный энергетический режим рабония с выхода блока 9 дифференциро- ты системы.вания скорости и значению приведен- динамических сво ствного момента инерции с выхода пер- системы, в частности обеспечение. певого блока 15 уставок формируется на реходного процесса без перерегуливыходе первого блока 10 умножениярования, осуществляется за счет ввезначение динамического момента, кото- дения контура нелинейной обратрое в третьем сумматоре 11 сравнива- ной связи но скорости.ется с сигналом, соответствующим моменту, развиваемому двигателем. Контур нелинейной обратной связиТаким образом, на выходе третьего выполнен таким образом, что в начасумматора 11 формируется сигнал, ха- ле пеРеходного процесса коэффициентрактеризующий момент нагрузки. , Демпфирования мал и, следовательно,обеспечивается высокая скорость пеВ устройстве 25 самонастройки в 50 Реходного процесса. По мере приблизависимости от величины момента иаг- жения скорости к своему установиврузки определяется значение опти- шемуся значению коэффициент демпфимальной по энергетическим возможиос- рования увеличивается, в реэультатям электродвигателя 6 скорости, те чего "перерегулирование уменьшат.е, выбирается оптимальный энерге- М ется, Это обеспечивается за счеттический режим работы и вырабатыва- перемножения сигнала ошибки и ско ется сигнал на изменение заданияпо скорости. рости в цепи дополнительной обратной связи, Сигнал ошибки после уси1164663 Составитель П. Кудрявцеваедактор Ю.Ковач Техред С,йовжийректор С.Ш Тираж 863ного комитета ССний и открытийаушская наб., д. одписн иал ППП "Патент", г. Ужгород, ул. Проектная, 4 Вления в блоке 19 умножения умножается на значение скорости в блоке 20 умножения, на выходе формируется сигнал положительной обратной связи, который в седьмом сумматоре 21 сравнивается с сигналом отрицательной обратной связи по скорости, пос тупающим с датчика 7 скорости, и формируется сигнал на изменение коэффициента передачи прямого кана.ла.Коэффициент демпфирования в начале переходного процесса, когда ошибка велика, будет малым, так как в этом случае сигнал положительной обратной связи по скорости настолько велик, что компенсирует сигнал отрицательной обратной связи по скорости,По мере уменьшения ошибки коэффициент демпфирования будет возрастать, так как с уменьшением ошибки уменьшается влияние дополнительМого контура нелинейной обратной связи по скорости.Так как самонастраивающаяся система управления рассчитана на работу с широким диапазоном скоростей и нагрузок, то для обеспечения заданной точности функционирования системы необходима подстройка коэфаказ 4185/43 ВНИИПИ Государств по делам изобре 113035 Москва, Ж, фициента усиления сигнала ошибкив контуре нелинейной обратной связи по скорости.При этом по значению момента 5 нагрузки с выхода анализатора 24момента нагрузки и сигналу, характеризующему глубину адаптации, поступающему с выхода третьего блока 23уставок, в третьем блоке 17 умно жения формируется сигнал на изменение в шестом сумматоре 18 коэффициента усиления сигнала ошибкив контуре нелинейной обратной связи, поступающего с выхода третьего 15 блока 23 уставок Введение контура нелинейной об.ратной связи по скорости и контура .самонастройки позволяет стабилизи- И ровать динамические свойства и оптимизировать энергетические режимы работы, что, в свою очередь, повышает быстродействие системы и приводит к возможности использования 25 электродвигателей с меньшими массогабаритными характеристиками.Сравнение с прототипом показало,что быстродействие системы увеличивается в 1,5-2 раза за счет авто.матической форсировки электродвигателя по скорости.
СмотретьЗаявка
3647738, 29.09.1983
МОСКОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ СТАНКОИНСТРУМЕНТАЛЬНЫЙ ИНСТИТУТ
КУЛЕШОВ ВЛАДИМИР СЕРГЕЕВИЧ, ОРЛЯНСКАЯ ТАМАРА ИВАНОВНА
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.06.1985
Код ссылки
<a href="https://patents.su/4-1164663-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для автоматического регулирования скорости приводов клетей двухниточной группы непрерывного стана

Номер патента: 768509
Опубликовано: 07.10.1980
Авторы: Динник, Карпинский, Кукушкин, Лошкарев, Чигринский
МПК: B21B 37/00
Метки: группы, двухниточной, клетей, непрерывного, приводов, скорости, стана
...много- ниточной и последующей группой клетей стана приводит к нестабильности размеров проката на входе в последующую однониточную группу и, следовательно, разнотолщинности готового профиля.Целью устройства является повышение точности геометрических размеров проката на входе в однониточную группу клетей стана независимо от числа прокатываемых двухниточной группой полос и упрощения схемы регулирования,Поставленная цель достигается тем, что предложенное устройство дополнительно содержит элемент чистого запаздывания, причем выход управляемого ключа соединен со входом элемента чистого запаздывания, выход которого соединен с входом каж 5 10 15 20 25 30 35 40 45 50 55 60 65 4дой из систем автоматического регулирова. ния скорости...
Устройство для измерения частоты иглопробивания, подачи и скорости выхода ткани в иглопробивных машинах

Номер патента: 1057592
Опубликовано: 30.11.1983
Авторы: Кивистик, Куузик, Рохула
МПК: D05C 13/02
Метки: выхода, иглопробивания, иглопробивных, машинах, подачи, скорости, ткани, частоты
...блоха связан с вторым входомпервого блока памяти, выход которого,связан с блоком индикации,На фиг, 1 изображена схема расположения датчиков церемвщения выходногомеханизма и частоты срабатываниямеханизма игпопробивания, на фиг. 2 бпок-схвма устройства дпя измерениячастоты иглопробивания и скорости выхода ткани.Устройство состоит из датчика 1 перв мещения выходного механизма, соединен ного с оснОвным вычиспитвльным блоком 2, датчика 3 частоты срабатывания механизма иглопробивания, соединенного с вспомогательным вычислительным блоком 4, блока 5 индикации, блока 6 коммутации, бпока 7 запуска, первый выход которого связан с входом эадатчикс. 8 времени измерения, а второй выход соединен с первым входом формирователя 9 имшульсов...
Накапливающий сумматор

Номер патента: 1278835
Опубликовано: 23.12.1986
МПК: G06F 7/49
Метки: накапливающий, сумматор
...что элемент И 4 (з.-2)-го12рд з 1 эядй 5 Одслгэтеьнь.и 1 с це)13)Йтп 1 элт 3 ляющей юине это о )с,)ллр 5 ттл пя выходе имеет логичест.;.ии "О", цаличием ц 3 юПе пе)эецОса 1.1"2) "1 с) )э;л ряД 3 цуЛ 5 ГгбЬ)ТС 1 ЯСЭТС 5 р або ц ГумьЯТО)Э. 8 ПО МОДЛю,т 13 Л. Кс ЭПСгЕЭПТЯ И.Ит д постоя)иля пода. а с вьтхотта эле ЕН 1 Я И 2 ц.тт 1 ЕВОГО СИГНЯЛ т 1 а ВХОД элемента 1)ТИ) э 05.5 с 5 ес 5 тс 3 м что на входы элемента 1 ШИ 31 подается два нулевьх с;гнала,11 ри суммировании в тгэддивионпойСИСТЕМЕ СЧИСЛЕЦИЯ СИГНац ПСРЕт)с)СЯ ИЗ(з.-1)-го разряда. учас.твует лппв )эСЛОжЕЦШ 1 ЦЕ ВЛГГЯ 5 Ца ПОтУТЕЦГЕ СИГнала Ге)эеосд. из дгп)ного рлгт)5 да.Прн рабвтЕ С ЧИСПЛ ПГ) трэттста)3 ЛЕНЦЬЬ)И В,ФЬ)эОНЯЧтп 1 ЕВОИ" С,гн т 3.С: гЧИСЛЕШя ЛО ГттЧЕСКЛЯцр)тсутотпуЕТ...
Устройство для контроля электропотребления

Номер патента: 1566371
Опубликовано: 23.05.1990
Авторы: Антоневич, Богданов, Коялис, Куркуль, Сабаляускас
МПК: G06F 11/30
Метки: электропотребления
...адресом, хранящимся в счетчике адреса32 (в первый период нулевой адрес).По синхроимпульсу с выхода 42 в счетик 46 добавляется единица, и по.инхроимпульсу с выхода 43,новое сод.ржимое счетчика 46 записьвается в 45узел 49, По синхроимпульсу с выхода44 в счетчик 32 адреса добавляетсяединица, Данный процесс циклическиповторяется, пока из блока 5 приемаинформации не поступит сигнал признака информации. В этом случае по синхроимпульсу с выхода 40 триггер 25устанавливается в единичное состояние. Нулевой выход триггера 25 закрывает элемент И 28 и усилители 31, аединичный выход открывает элементИ 27 и одновременно дает разрешениена Выдачу адреса опрашиваемого датчика с блока 5. По адресу с блока 5, который поступает через группу 50...
Устройство декодирования линейных сверточных кодов

Номер патента: 559419
Опубликовано: 25.05.1977
Автор: Измалков
МПК: H04L 3/02
Метки: декодирования, кодов, линейных, сверточных
...7, по модулю два,Устройство работает следующим образом.По шин 8 поступает информационная часть сверточного кода, а по шине о одновременно с информационной - поверочная часть сверточного кода (синдром).С каждым сдвигом информации в информационном регистре сдвига 1 на выходе вычислителя синдрома 3 появляется очередной синдром, получаемый делением кода, хранящегося в информационном регистре сдвига 1, иа образующий многочлен,Вычисленный синдром поступает на вход первого сумматора 6 по модулю два, гдеон сравнивается с принятым по шине 9 синдромомЕсли в информационной и поверочной частях кода не было ошибок (сбоев), то вычисленный и принятый синдромы будут совпадать и на выходе первого сумматора по модулю два появится логический "О", В случае...
Предыдущий патент: Устройство для управления копирующим манипулятором
Следующий патент: Квазиоптимальный регулятор
Случайный патент: Устройство защиты входов интегральных схем со структурой мдп