Автоматический захват
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 109523
Автор: Меламед




Текст
М 109523 Класс 35 Ь, 6 ов СССР ИСАНИЕ ИЗОБР НИЯ ЕТЕЛ АВТОРСКОМУ С У С. М, Меламед ВТОМАТИЧЕСКИЙ ЗАХВАв Комитст иоЧииистоов Г( ения состоит версой сосдцхацизмом, сочатого сечетяг (швелле 1 имц Выреза- втоматически бокоВой ВИД Автоматические захваты для транспортирования металлических форм с железобетонными изделиями, выполненные в виде рамы с поворотными захватными крюками, шарнирно соединенными жесткими тягами с подвешиваемой к крюку крана траверсой, известны.Однако загрузка и выгрузка цз ямцых камер пропаривания отформованных железобетонных изделий в металлических формах с помощью известных траверс не нашли широкого распространения в промышленности вследствие ряда существенных недостатков, основным из которых является применение тяжелой и сложной системы рычагов, передач и пружин для фиксации открытия и закрытия захватных крюковв. Особс 5 п 1 ост изобре 1 в том, что рзма с тра иена Фиксирующим ме ст 051 щим из дВух короб ния профилированных ров) с соотве 1 ствуюн ми, уцравл 5 пощиыи д действхчошей звезгсочкНа фиг. 1 Изображе 5 автоматического захвата; на фиг. 2 - разрсз фиксирующего механизма через ось звездочки; на фиг. 3 схема положения фиксирующего механизма с раскрьпыми рычагами захвата.Автоматический захват состоит из рамы, рычагов захватов с жесткими тягами, траверсы ц механизма фиксации положения рычагов захвата.Рама представляет собой две продольных трубы I, с которыми шарнирно соединены трц поперечных швеллера 2, на концах которого имеются направляющие 3, служащие для правильной посадки рамы на борты формы 4 с железобетонными изделиями.Рычаги захватов 5, шарнирцо посаженные на труоы 1, имеют жесткие тяги б, соединенные с траверсой 7.Механизм фиксации положения рычагов захвата состоит цз двух швеллеров коробчатой формы: на ружного 8 и внутреннего 9. Наружный швсг 1 лер жестко скреплен со спедних 5 попсречным гнВел,1 сром 2. Внутренний швеллер 9 может пере Мо 109523мещаться поступательно по направляющим плоскостям наружного швеллера. На внутренней поверхности наружного швеллера 8 на жестко скрепленной с ним оси 10 насакена фасонная звездочка 11 - фиксатор положения рычагов захвата, а на внутренней поверхности швеллера 9 жестко укреплен уор 12, который способствует повороту звездоки при О - кпывании и закрывани рычагов захвата. Й обоих швеллерах 8 и 9 сделаны прорези 1 одинаковой длины для прохода концов звездочки, посаженной несмметпично, чтобы не делать прорезей с противоположной стороны.Фиксирующий механизм работает следующим ооразом.Фиксация открыпгого положения рычагов захвата изображена на фиг. 3. В таком положении захват, подвешенный к крюку подъемного механизма, транспортируется по пролету. Звездочка заклинена в прорези внутреннего швеллера 9 и на жесткие тяги рычагов захвата усилие не передается. При опускании захвата на форму с келезобетонным изделием внутренний швеллер 9 опускается, упор 12, укрепленный на уровне верхней кромки прорези швеллера, опирается па удлиненную плоскость звездочки, рама ложится на форму с изделием, рычаги захвата опускаются,Поднимая траверсу, кран вместе с тем поднимает внутренний швеллер механизма фиксации. Прорезь внешнего швеллера, а затем и прорезь внутреннего швеллера, нажимая кромками на нижний конец звездочки, поворачивают ее в положение, параллельное швеллерам, Рычаги захвата, под действием жестких тяг, поворачиваясь на шарнире, прочно захватывают борты формы 4 и поди им а ют ее.Спустив форму с изделием, кран через траверсу, продолжая движение вниз, раздвигает рычаги захвата, а внутренний швеллер 9, с помощью упора, входящего во внутренний угол звездочки, поворачиваст ее до положения, изображенного на фиг. 3.Автоматический захват за счет перестановки поперечных шве;геров 2 может быть переналажен на необходимый размер формы с железобетонным изделием. 11 рс тч сзоорстепия 1. Автоматический захвадля транспортирования металлических форм д,я железобетонных изделий, выполненный в виде рамы с поворотными захватными крюками, шарнирно соединенными жесткими тягами с подвешиваемой к крюку крана траверсой, о т л и ч а ю щ и йс я тем, что, с целью фиксирования захватньх крюков в раскрытом или закрытом положении, рама захвата несет коробчатую стойку с осью для свободно поворотной фиксирующей звездочки, а траверса снабжена вертикальной балкой коробчатого сечения, свободно входящей в коробчатую стойку и несуцей на внутренней стороне стенки упор, воздействующий на звездочку в крайнем нижнем положении вертикальной балки, причем в полкс последней и в прилежащей к ней стенке короочатой балки образованы прорези, поперечные кромки которых взаимодействуют со стопорной звездочкой.2, Форма выполнения захвата по п. 1, отличающаяся тем, что, с целью ввода звездочки только в прорези в одной стенке коробчатой стойки, ось поворота звездочки смещена относительно продольной оси симметрии коробчагой стойки.,% 109523Фиг. 3 амтв. редактор Л. Г, Голандский Стаидартгиз. Поди. к псч. 17/11 1958 г. Ооъем 0,25 и. л. Тирак 600. Цена 50 коп. Типография Комитета ио делам изобретений и открытий при Совете Министров СССРМосква, Неглинная, 23. Зак. 668
СмотретьЗаявка
564547, 14.01.1957
Меламед С. М
МПК / Метки
Метки: автоматический, захват
Опубликовано: 01.01.1957
Код ссылки
<a href="https://patents.su/4-109523-avtomaticheskijj-zakhvat.html" target="_blank" rel="follow" title="База патентов СССР">Автоматический захват</a>
Механизм автоматического регулирования подачи для лесопильных рам с непрерывной подачей

Номер патента: 81089
Опубликовано: 01.01.1949
Автор: Войтинский
Метки: лесопильных, механизм, непрерывной, подачей, подачи, рам
...передаточного числа между ним и верхним валком, изменяющегося пропорционально квадрату диаметра бревна.Изменение мгновенного передаточного числа между валком подачи и роликом фрикциона, пропорциональное заданной площади срединного пропила, конструктивно достигается применением второго углового рычага Г, одно плечо которого при помощи ползунка и микрометрического винта с маховичком Д может изменять свою длину. Это плечо второго рычага Г связано тягой с верхним плечом первого рычага в; другое плечо соединено тягой ЛГ с подвижной греоенчатой полосой Е, в свою оче редь связанной с рычагом 3, непосредственно контролирующим перевод ролика фрикциона. Рычаг 3 может соединиться по желанию или с под. вижной гребенкой Е, или с неподвижной...
Клиновой механизм автоматического трубопрокатного стана

Номер патента: 137876
Опубликовано: 01.01.1961
Авторы: Обрезчиков, Палей, Полищук
МПК: B21B 17/12, B21B 31/30
Метки: клиновой, механизм, стана, трубопрокатного
...положении.Предлагаемый клиновой механизм автоматического тного стана является более надежным и точным. Достигаетменением регулируемого упора, дающего возможность устаний валок в рабочем положении с большей степенью точнопечивающего надежное самозапирание механизма,На чертеже показана схема предлагаемого клиновогоМеханизм состоит из электродвигателя 1, регулируемокривошипно-шатунного механизма 3, редуктора 4, клиньевго выкл юч а тел я б.Механизм работает следующим образом. Пвалка в рабочее положение кривошип проходит л2 - 3 и упирается в упор. Благодаря этому подкатки во время работы стана кривошип будетгарантируя невозможность отхода клиньев и точнего валка.Для увеличения надежности работы мвошипом мертвой точки...
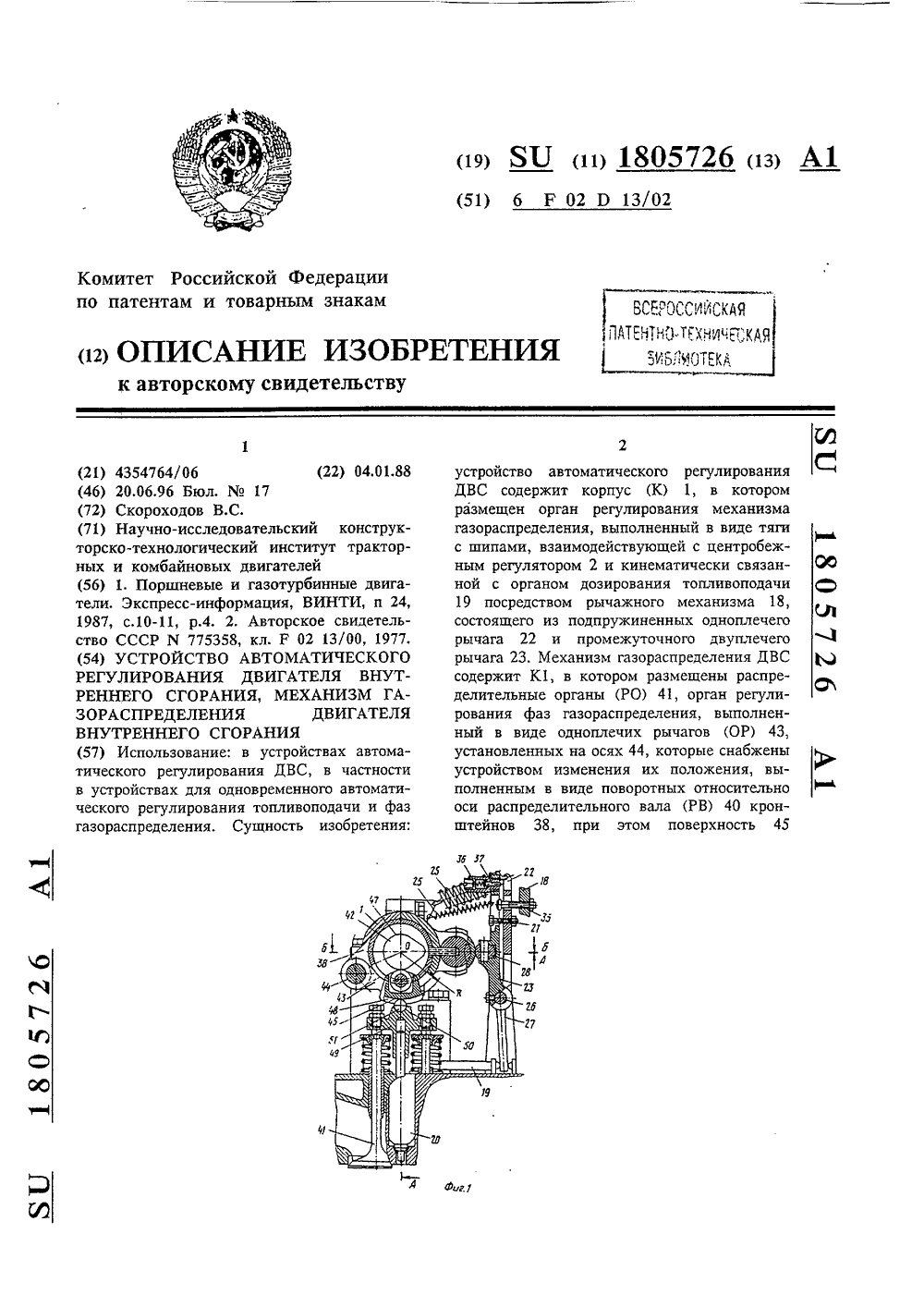
Устройство автоматического регулирования двигателя внутреннего сгорания, механизм газораспределения двигателя внутреннего сгорания
Номер патента: 1805726
Опубликовано: 20.06.1996
Автор: Скороходов
МПК: F02D 13/02
Метки: внутреннего, газораспределения, двигателя, механизм, сгорания
...11 соединена каналом 13 с системой смазки ДВС. Устройство содержит также тяту 14 с шипами 15, установленную в корпусе 1 с возможностью продольного перемещения, для чего в корпусе 1 выполнены пазы 16, в которых размещены шипы 15. Тяга 14 связана с поршнем 3, а в центре ее выполнено отверстие 17, выходящее в полость 10. Кроме того, устройство содержит рычажный передаточный механизм 18, связывающий рейки 19 насос-форсунки 20 с тягой 14, Связанные с возможностью взаимного перемещения болтом 21 основной 22 и промежуточный 23 рычаги механизма 18 соединены с корпусом 1 соответственно основной пружиной 24 и пружиной обогатителя 25, Рычаги 22 и 23 установлены на оси 26 с возможностью взаимодействия плеча 27 с рейками 19, причем...
Механизм автоматического зажима и разжима

Номер патента: 241202
Опубликовано: 01.01.1969
Автор: Тюков
МПК: B23C 5/26
Метки: зажима, механизм, разжима
...внижней части шпинделя.Блокирующие устройства выполнены в ви 10 де микропереключателей Л 4 П, и ИП взаимодействующих с кулачком гильзы шпинделяи кулачком вилки переключения перебора ификсирующих определенное положшгие гильзы и шестерен перебора и воздействующих на15 цепь управления электродвигателя.Работает механизм следующим образом.Механизм может работать только при выведенном в нейтраль переборе и верхнем положении гильзы шпинделя. В этом случае кула 20 чок, связанный с вилкой пепебора, нажметна микропереключатель .ЧП а кулачок, связанный с гильзой шпинделя, нажмет на микропереключатель,ЧП шпиндель нарезанными на конце зубьями войдет в зацепление с25 зубьями полумуфты 14, закрепленной в корпусе бабки.Команда на зажим подается...
Механизм прерывистого вращения и фиксации

Номер патента: 1816919
Опубликовано: 23.05.1993
Авторы: Балаева, Лукашин, Парганаев, Шкоркин
МПК: F16H 27/02
Метки: вращения, механизм, прерывистого, фиксации
...рычаг 13 заодно с кулачком 12 против часовой стрелки, Кулачок 12 боковыми гранями воздействует на плунжеры 6, Пружины 7 начинают сжиматься, а плунжеры б входят в отверстия 4 колеса 3 и давят на фиксаторы 19, вытесняя их из отверстия 4 колеса 3. Колесо 3, освободившись от фиксатора 19, оказывается соединенным с планшайбой 5 и передает вращение через вал 2 на звездочку 21. Колесо 3 поворачивается на определенный угол, а следующее отверстие 4 оказывается расположенным напротив фиксатора 19, Одновременно . шток цилиндра поворачивает рычаг 13, который проходит расстояние "Е" и упирается в регулируемый упор 10. Упор 10 отрегулирован таким образом, чтобы фиксаторы точно попадали в отверстия 4. В это время фиксаторы 19 пад действием пружин 20...
Предыдущий патент: Устройство для захвата, транспортирования и сброса груза
Следующий патент: Стенд для исследования плавности хода автомобиля и испытаний узлов и деталей на долговечность
Случайный патент: Устройство для перемещения изделий в нагревательной печи