Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
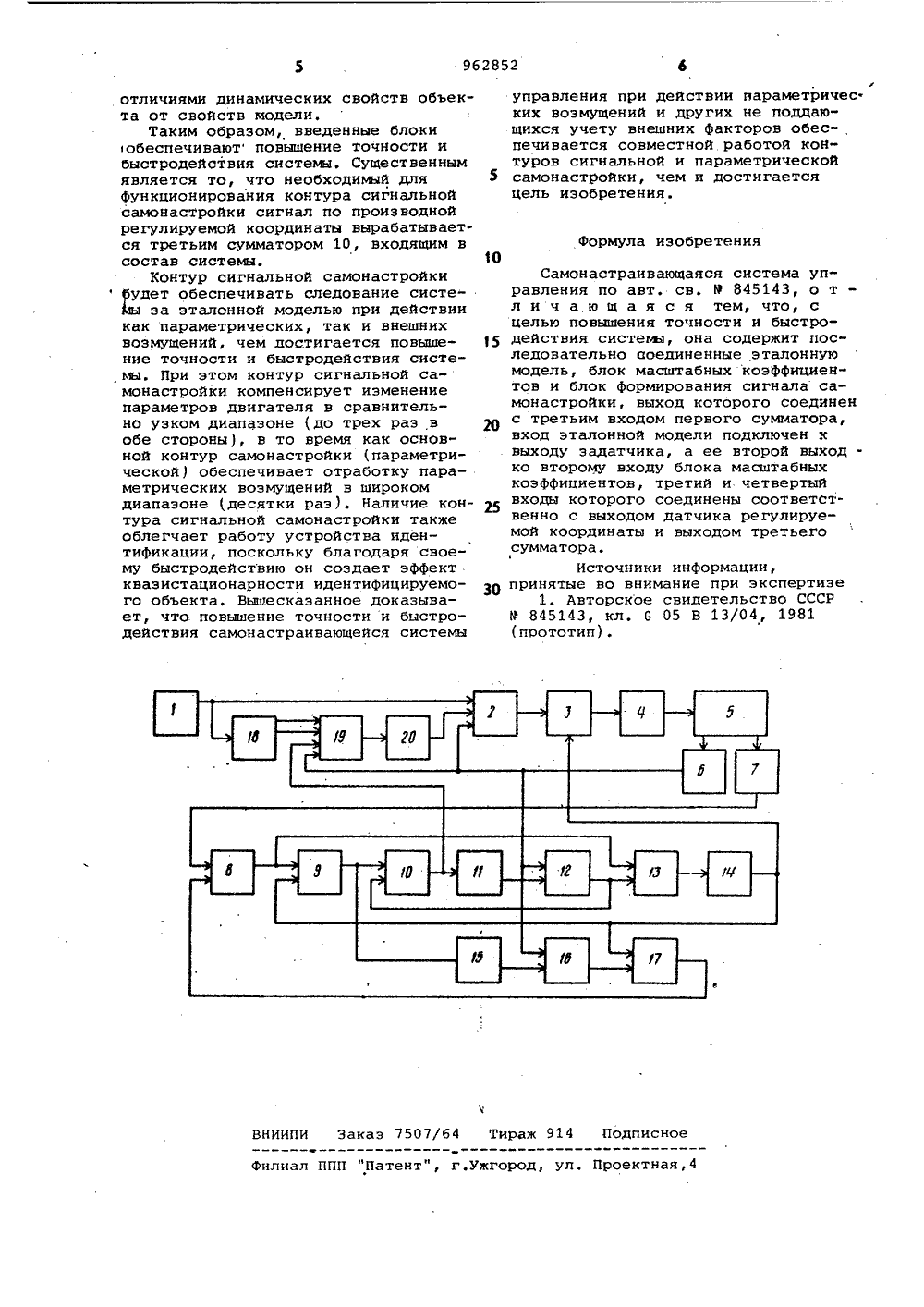
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Сфвз СоветскихСфцналнстнческнхРеснублни(61) Дополнительное к авт. свид-ву р(22) Заявлено 05.0580 (21) 2920808/18-24 рц м.кп. С 05 В 13/04 с присоединением заявки Мо(23) Приоритет Государствеиный комитет СССР ло делам изобретений и открытий(088.8) Опубликовано 30,09.82,Бюллетень й 9 36 Дата опубликования описания 30.09.82 Ю.А. Борцов, В.Б. Второв, Н.Д. ПоляХов, В,В А.А. Корбут и В.А. Яковлев(72) Авторы изобретения 1) Заявител Ле адский ордена Ленина электротехничес им, В.И, Ульянова (Ленина)(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕН Изобретение относится к автомати ческому управлению и может быть использовано для управления электро- приводами. 5По основному авт. св. 9 845143 известна самонастраивающаяся система управления, содержащая последова- тельно соединенные задатчик, первый сумматор, регулятор, усилитель мощности и электродвигатель с установленными на нем датчиком регулируемой координаты и датчиком тока, выход которого через последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор,-вто-.рой б ок умножения и второй интегратор п дключен к управляющему входу р регул ора и второму входу первого блока умножения, и последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого подключен к выходу второго интегратора, выход - к второму входу второго сумматора, выход кото рого соединен с вторым входом второго блока умножения, Выход датчика регулируемой координаты соединен с вторыми входами первого, четвертого и пятого сумматоров, вход третьего ЭО интегратора соединен с первым входом третьего сумматора, второй вход которого подключен к выходу четвертого сумматора 1 .Недостатком данной самонастраивающейся системы управления является неполная компенсация коэффициента передачи электродвигателя и ограничение скорости самонастройки из-за инерционности элементов адаптивного механизма, что снижает точность и быстродействие системы. Кроме того, основной контур регулирования не обладает инвариантностью к действию внешних возмущений, что приводит к невозможности обеспечить в широком диапазоне высокую точность стабилизации регулируемой координаты.Цель изобретения - повышение точности и быстродействия самонастраивающейся системы управления.Указанная цель достигается тем, что известной самонастраивающейся системе управления дополнительно установлены последовательно соединенные эталонная модель, блок масштабных коэффициентов и блок формирования сигнала самонастройки, выход которого соединен с третьим входом первого сумматора, вход эталон 962852ной модели подключен к выходу за- Фициента передачи происходит благо- датчика, а ее второй выход - к вто- даря тому, что на входе настраиварому входу блока масштабных коэффи-емой модели двигателя, образованной циентов, третий и четвертый входы ко- первым блоком 9 умножения и первым торого соединены соответственно с вы интегратором 11, формируется сигходом датчика регулируемой коорди нал, пропорциональный динамическонаты и выходом третьего сумматора. му току. С этой целью третий интеграНа чертеже представлена блок-схе- тор 15, пятый сумматор 16 и блок 17 ма самонастраивающейся системы управ- челения совместно с вторым суммато 3ления. ром 8 и первым блоком 9 умножения осСхема содержит задатчик 1, первый 10 ществляют идентификацию составляющей сумматор 2, регулятор 3, усилитель 4 тока, соответствующей моменту нагоузмощности, электродвигатель 5, с ус- ки. Например, при увеличении нагтановленными на нем"датчиком 6 регу- рузки выходной сигнал второго сумлируемой координаты и датчиком 7 то- матора 8 перестанет соответствовать ка, второй сумматор 8, первый блок 15 новому значению динамического тока, 9 умножения, третий сумматор 10, вследствие чего через первый блок первый интегратор 11, четвертый сумма умножения, третий интегратор 15 тор 12, второй блок 13 умножения; и пятый сумматор 16 он вызовет увевторой интегратор 14, третий интег- личение выходного сигнала блока 17 ратор 15, пятый сумматор 16, блок 17 .2 О деления до значения, соответствующе- деления, эталонная модель 18, блок го увеличивающемуся моменту нагруз масштабных коэффициентов й блок ки20 Формирования сигнала самонастрой- Ввиду инерционности контура параки. метрической самонастройки он встуСистема при этом приобретает пает в действие не сразу. Напротив, следующую структуру. Основной кон- З контур сигнальной самонастройки натур регулирования образован блоками чинает немедленно ликвидировать ошиб.1-6. Блоки 7-17 образуют устройство ку между скоростью двигателя и выхоидентификации коэффициентапереда- дом эталонной модели 18, обусловчи ток - скорость электродвигателя, ленную как параметрическими измене- Оценка этого коэФфициента, выраба- ниями, так и действием любых не подтываемая вторым интегратором 14, дающихся учету внешних возмущений, подается на управляющий вход регу- Блок 19 масштабных коэффициентов Юятора 3, перестраивая его коэффи- формирует сигналы ошибок по регулициент усиления параметрическая са- руемой координате и ее производной монастройка). Блоки 18-20 обеспечива для чего соответственно из сигнала ют сигнальную самонастройку системы. с первого выхода эталонной модели 18Работа самонастраивающейся систе- вычитается выходной сигнал датчимы управления например, скоростью ка регулируемой координаты б и из вращения электродвигателя с пере- сигнала с второго выхода эталонной менным моментом инерции и регулируе модели 18 вычитается сигнал с входа мым потоком возбуждения) происходит первого интегратора 11. Сигналы разследующим образом. ности усиливаются со своими коэфЕсли коэффициент передачи двига- фициентами, а затем суммируются. теля изменился, например уменьшился , Выходной сигнал с блока 19 подается вследствие уменьшения потока воз на вход блока 20 формирования сигнала буждения или увеличения приведенного самонастройки, Этот блок, реализую- момента инерции, то во время пере- щий знаковую функцию, вырабатывает ходного процесса, вызванного, напри- сигнал самонастройки, воздействующий мер, увеличением выходного сигнала на третий вход первого сумматора 2. задатчика 1, выходной сигнал датчи Следует отметить, что введенные ка 7 тока, проходя через сумматор 8, блоки, образующие параллельный конпервый блок 9 умножения, третий сумма тур сигнальной самонастройки, обестор 10, первый интегратор 11, четвер- печивает согласование динамйки тый сумматор 12 и второй блок 13 системы с динамикой эталонной модеумнофения, вызовет уменьшение вы- ли путем подачи на вход первого сумходного сигнала второго интегратора .матора дополнительного сигнала са 14 до значения соответствующего ко- монастройки. Эталонная модель наст- эффициенту передачи двигателя, так раивается исходя из желаемого видакак только в этом случае выходнойреакции системы на управление. Сиссигнал четвертого сумматора 12 ста- . тема будет ликвидировать любые отклонет равным нулю. Вследствие этого Ж нения регулируемой координаты от двиза счет воздействия на управляющий жения, предписываемого моделью, вне вход регулятора 3 его коэффициент зависимости от того, какими причина- усиления увеличится, компенсируя ми эти отклонения вызваны: действиуменьшение коэффициента передачи ем внешних возмущений, изменением двигателя. Точная идентификация коэф 65 параметров объекта или исходными.Ужгород, ул. Проектная,4 илиал ППП "Па отличиями динамических свойств объекта от свойств модели.Таким образом, введенные блоки обеспечивают повышение точности и быстродействия системы. Существенным является то, что необходимый для Функционирования контура сигнальной самонастройки сигнал по производной регулируемой координаты вырабатывается третьим сумматором 10, входящим в состав системы.Контур сигнальной самонастройкифудет обеспечивать следование системы эа эталонной моделью при действии как параметрических, так и внешних возмущений, чем достигается повышение точности и быстродействия системы. При этом контур сигнальной самонастройки компенсирует изменение параметров двигателя в сравнительно узком диапазоне (до трех раз в обе стороны), в то время как основной контур самонастройки параметрической) обеспечивает отработку параметрических возмущений в широком диапазоне десятки раз). Наличие контура сигнальной самонастройки также облегчает работу устройства идентификации, поскольку благодаря своему быстродействию он создает эффект кваэистационарности идентифицируемого объекта. Вышесказанное доказывает, что повышение точности и быстродействия самонастраивающейся системы управления при действии иараметричес.ких возмущений и других не поддающихся учету внешних Факторов обеспечивается совместной работой кон" туров сигнальной и параметрической 5 самонастройки, чем и достигаетсяцель изобретения. Самонастраивающаяся система управления по авт. св. 9 845143, о т -л и ч а ю щ а я с я тем, что, сцелью повышения точности и быстро 15 действия системы, она содержит последовательно аоединенные эталоннуюмодель, блок масштабных коэффициентов и блок Формирования сигнала самонастройки, выход которого соединенс третьим входом первого сумматора,вход эталонной модели подключен квыходу задатчика, а ее второй выходко второму входу блока масштабныхкоэффициентов, третий и четвертыйвходы которого соединены соответственно с выходом датчика регулируемой координаты и выходом третьегосумматора.1Источники информации,ЗО принятые во внимание при экспертизе1. Авторское свидетельство СССРУ 845143, кл, 0 05 В 13/04, 1981
СмотретьЗаявка
2920808, 05.05.1980
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ВТОРОВ ВИКТОР БОРИСОВИЧ, ПОЛЯХОВ НИКОЛАЙ ДМИТРИЕВИЧ, ПУТОВ ВИКТОР ВЛАДИМИРОВИЧ, КОРБУТ АЛЕКСЕЙ АНДРЕЕВИЧ, ЯКОВЛЕВ ВЛАДИМИР АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/04
Метки: самонастраивающаяся
Опубликовано: 30.09.1982
Код ссылки
<a href="https://patents.su/3-962852-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Система передачи телевизионного сигнала с помощью дифференциальной импульсно-кодовой модуляции

Номер патента: 987854
Опубликовано: 07.01.1983
Авторы: Векуа, Мурджикнели, Сулханишвили, Харатишвили
МПК: H04N 7/18
Метки: дифференциальной, импульсно-кодовой, модуляции, передачи, помощью, сигнала, телевизионного
...19 импульсов коммутации и формирователь 25 .20 управляющих импульсов, причем вход сдвигового региатра 15 соединен .с вы-, ходом сумматора 12, а первый выход сдвигового регистра 15 - а первым входом первого коммутатора 16., вто- ЗО рой и третий выходы сдвигового регистра 15 - с первым и вторым входами второго коммутатора 17. Первый.вход устройства 18 обнаружения ошибок соединен с входом преобразователя 10 кода,. а другой вход устройства 18 обнаружения ошибок - с вторым входом сумматора 12, выход устройства обнаружения ошибок 18 соединен с третьим входом первого коммутатора 16 и.с первым входом формирователя 19 импульсов коммутации, выход которого соединен с третьим входом второго коммутатора 17, а выход Формирователя 20 управляющих...
Система передачи и приема сигнала изображения

Номер патента: 1494246
Опубликовано: 15.07.1989
Автор: Гуднов
МПК: H04N 1/41
Метки: изображения, передачи, приема, сигнала
...выводится информация о нулевом (из элемента 35 памяти)и первом (из элемента 36 памяти) коэффициентах косинусного кодированиявсех текстурных областей кодирования,затем в следующем телевизионном кадре - о втором (из элемента 37 памяти)и третьем (из элемента 38 памяти)коэффициентах косинусного кодирования и т.д. Таким образом, вначалепередается информация о более грубойтекстуре изображения, а в заключение - о наиболее мелкой текстуре, Изописания работы устройства 1 кодирования сигнала изображения следует.что передача сигнала иэображениянимает время, равное 13 телевизионным кадрам, которые распределены следующим образом: передача сигнала фоновой составляющей (первый кадр),сигнала контуров изображения (второй - девятый кадры), сигнала тексту...
Десятичный сумматор в избыточной системе счисления

Номер патента: 1256015
Опубликовано: 07.09.1986
Авторы: Гыскэ, Каленик, Ротарь
МПК: G06F 7/49
Метки: десятичный, избыточной, системе, сумматор, счисления
...шаг алгоритма.При этом на выходах элементов ИЛИ21, 24-26 образуется четырехразрядный код величины Р - 10 Р Сложение этой величины с промежуточнойсуммой осуществляется в одноразрядных сумматорах 14-17.Входы и выход положительного иотрицательного переносов используются для связи между разрядами в параллельном многоразрядном десятичномзнакоразрядном сумматоре,Формула изобретенияДесятичный сумматор в избыточной системе счисления, содержащий в каждом разряде первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый одноразрядные сумматоры, элемент И-НЕ, пять элементов ИИ, шесть элементов И, причем первые и вторые информационные входы первого, второго, третьего, четвертого одноразрядных сумматоров являются входами...
Система передачи цветного телевизионного сигнала

Номер патента: 1525944
Опубликовано: 30.11.1989
Авторы: Векуа, Комар, Новаковская, Харатишвили
МПК: H04N 7/18
Метки: передачи, сигнала, телевизионного, цветного
...вырабатываемыми генератором 30 коммутирующих импульсов, который управляется импульсами с переходом (Т = 20 мс), полученными навыходе блока 28 выделения синхроимпульсов, Генератор 29 стробирующих,импульсов управляется импульсами счастотой строк с периодом Н, которыеполучаются на выходе блока 28 выделения синхроимпульсов.Для восстановления в приемнике непереданных элементов изображения(отсчетов) 2, 4, 6, в нечетныхстроках и элементов (отсчетов) 3,5,7, , в четных строках (фиг. 4)служит интерполятор 36 субдискретизации, Для этого на его управляющиевходы подаются соответствующие стробирующие импульсы с линии задержки 32.Рассмотрим подробно работу интерполятора 36 субдискретизации.Сигналы полей 2, 4, 6 и 1, 3, 5поступают на входы...
Десятичный сумматор в избыточной системе счисления

Номер патента: 1594524
Опубликовано: 23.09.1990
МПК: G06F 7/49
Метки: десятичный, избыточной, системе, сумматор, счисления
...величина Р. Еечетырехразрядный код образуется навыходах элементов ИЛИ 21, 23-25,Сложение этой величины с промежуточным результатом осуществляется в блоке 4 Аормироваиия конечного результата, состоящем из одноразрядныхсумматоров 1-20, Тем самым в блоках 3 и 4 (коррекции и Аормирования .конечного результата) реализуетсятретий шаг алгоритма.Входы и выходы положительного иотрицательного переносов используются для связи между разрядами в параллельном многоразрядном десятичномсумматоре в избыточной зцакоразрядной системе счисления,Рассмотрим пример сложений десятичных знакоразрядных чисел по выше приведенному алгоритму. Значенияоперандов в обычном десятичном представлении равны Х = 26345, а У =- 18094,В знакоразрядном представлении их...
Предыдущий патент: Позиционный электропривод
Следующий патент: Струйный цифровой регулятор расхода
Случайный патент: Узел валков прокатной клети