Способ определения положения оси вращения ротора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 945694
Авторы: Дегтярев, Порубаймех
Текст
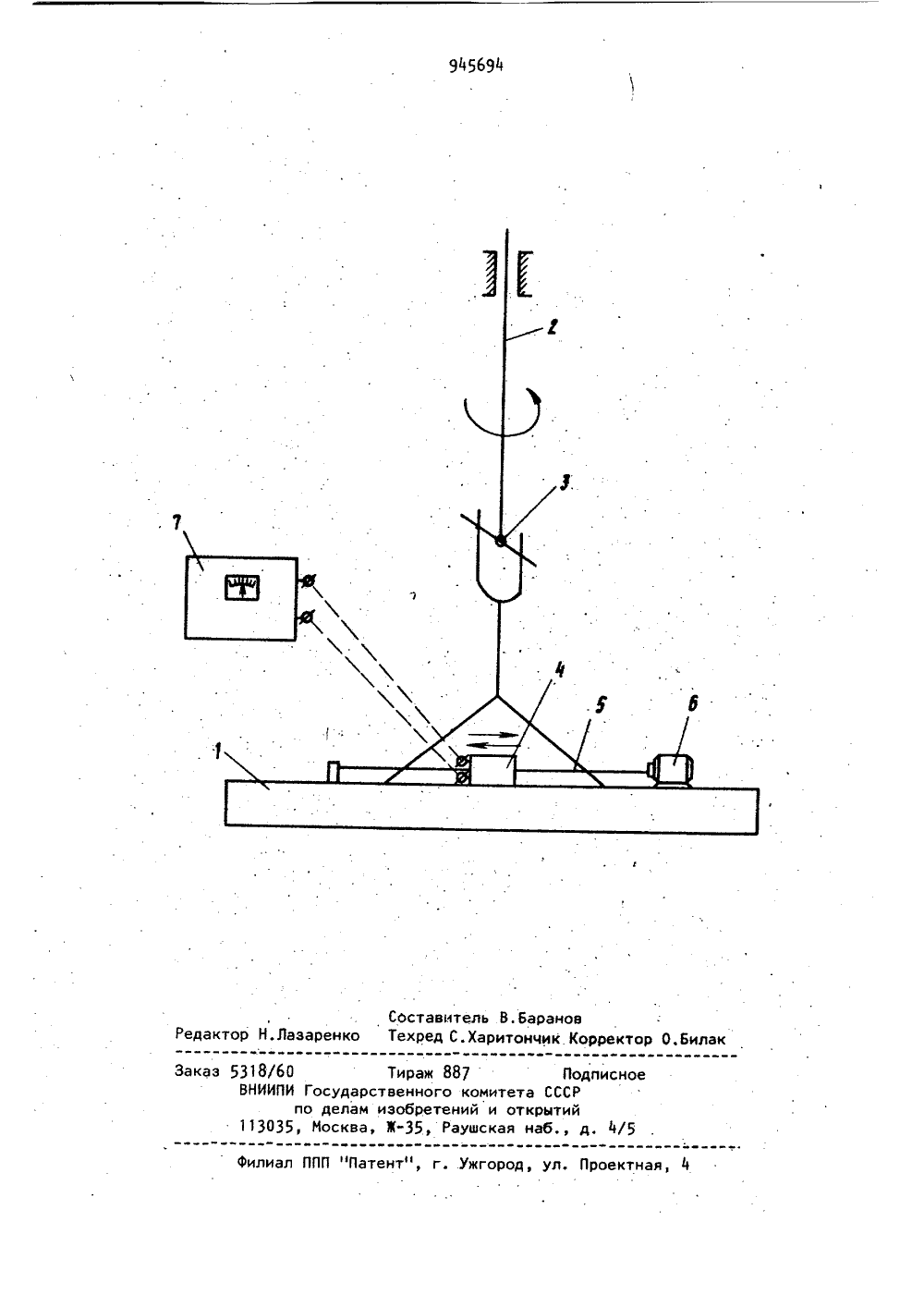
. Респубпнк ОП ИСАНИЕИЗОБРЕТЕНИЯК АВтоеСКОмЮ СвидютвлЬСтвХ и 945694(5 )М, Кл,с присоединением заявки РЙ(23)Приоритет 9 аударетвееЖ квинтет СССР ае даам кзебрвтвккй и втврытквДата опубликования описания 23.07.82(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ О ВРАЩЕНИЯ РОТОРА1 2Изобретение относится к измеритель- помощью датчика перегрузок измеряют ной технике и может быть использова- линейные перегрузки при вращении но, например, для определения осиротора и по их значению судят о по- вращения платформы центробежной маши- ложении оси вращения. Этот способ ны при измерении величины перегрузки, применяется в роторах типа центрифуг, действующей на испытуемое изделие, предназначенных для испытаний имиустановленное на вращающейся платфор- тирующих воздействие линейных переме. грузок на испытуемое изделие, и сосИэвестен способ определения поло- тоящих из платформы и шпинделя 21. жения оси вращения ротора, заключающийся .в том, что устанавливают ротор Недостатком способа является то, на шпиндель, вращающийся в опорах, что при испытаниях допускается энаи определяют положение оси вращения чительная погрешность в определении ротора по положению оси вращения координат оси вращения, а следовашпинделя 13. 15 тельно, вносится погрешность в опре-Недостатком способа является не- деление величины перегрузки, дейобходимость установки измеряемого ствующей на испытуемый ротор. Укаротора на дополнительный шпиндель,что занная погрешность обусловлена наснижает точность определения оси вра- личием зазоров в месте соединения щения ротора. 20 платформы со шпинделем, что привоНаиболее близким к изобретению по дит к отклонению оси вращения плат- технической сущности является способ формы от положения оси шпинделя и определения положения оси вращения затрудняет определение координат ротора, зключающийся в том, что с действительной оси вращения.945694 4двигатель 6, который вращает ходовой винт 5, перемещая датчик перегрузок 4 в радиальном направлении поре. платформе 1, Меняя полярность питат ю ния .электродвигателя 6, изменяетсянаправление вращения ходового винта5 и, тем самым, изменяется направле-ние перемещения датчика 4 перегрузок,При этом контроль сигнала датчика пе 10 регрузок осуществляется по измери"тельному прибору 7, Уменьшение уровня сигнала свидетельствует о том,во что датчик перегрузок приближаетсяе- к действительной оси вращения плат 13 формы и наоборот. При достиженииуровня сигнала датчика 4 перегрузок,соответствуоцего нулевой перегрузке, .ол- его перемещение прекращают и останавливают вращение платформы 1. При20 этом место нахождения центра массыего груза чувствительного элемента датчи. ка 4 перегрузок соответствует положению оси вращения платформы.ти . Применение описанного способаыпозволяет с высокой точностью находить положение действительной осивращения платформы, а следовательноа- и величину перегрузок, действующих на испытуемое иэделие,Цель изобретения - повышениеточности измерения.Эта цель достигается тем, чтоустанавливают в геометрическом центротора датчик перегрузок, перемещаюпри вращении ротора датчик перегру,зок в плоскости, перпендикулярнойоси вращения, до достижения нулевыхпоказаний и по месту нахожденияцентра масс груза чувствительногоэлемента датчика судят о положенииоси вращения ротора,На чертеже представлено устройстдля реализации данного способа примнительно к испытаниям, имитирующимвоздействие линейных перегрузок наиспытуемый ротор.В геометрической оси ротора, выпненного в виде платформы 1, имеющейвозможность вращения вокруг вертикальной оси, шпинделя 2 и связывающ1 их шарнирного механизма 3, устанав"1 ливают датчик 4 перегрузок такимобРазом, чтобы его ось чувствительносбыла направлена по радиусу платформ1. Датчик 4 перегрузок имеет возможность перемещаться по радиусу платФормы в обоих направлениях путем врщения ходового винта 5 от электродвигателя 6. Сигналы датчика 4 перегрузок регистрируются измерительным приборомСущность способа заключается в том,что в геометрическом центре вращающе-,гася ротора предварительно устанавливают датчик перегрузок, чувствительная ось которого направлена по радиусуплатформы, приводят ротор во вращение и, перемещая датчик перегрузокв плоскости, перпендикулярной осиврацения ротора, .добиваются сигнала датчика, соответствующего нулевойперегрузке, после чего вращение пре"кращают и положение действительнойоси вращения ротора определяют по мес-,4ту нахождения центра массы груза чувствительного элемента датчика перегрузок, отмеченного на датчике меткой,Способ осуществляется следующимЯобразом.помощью электродвигателя 6 при-водят во вращение шпиндель 2 с платформой 1 и закрепленным на ней в геометрическом центре датчиком 4 перегрузок. После вывода платформы наЯобороты подают напряжение на электроФормула изобретенияСпособ определения положения осивращения ротора, заключающийся в том,что с помощью датчика перегрузок измеряют линейные перегрузки при вращении ротора и по их величине судят оположении оси вращения, о т л и ч аю щ и й с я тем, что, с целью повыщения точности измерения, устанавливают в геометрическом центре роторадатчик перегрузок, перемещают привращении ротора датчик перегрузок вплоскости, перпендикулярной оси вращения, до достижения нулевых показаний и по месту нахождения центра массгруза чувствительного эпемента датчика судят о положении оси вращения ротора.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРЮ 303288; кл, С 01 И 1/12, 1970.2. Савельев И.В. Курс общей физики.И., "Наука", 1970, т. 1., с. 162- 166
СмотретьЗаявка
2789614, 03.07.1979
ПРЕДПРИЯТИЕ ПЯ В-2289
ПОРУБАЙМЕХ ВЛАДИМИР ИЛЬИЧ, ДЕГТЯРЕВ АНАТОЛИЙ ИЛЬИЧ
МПК / Метки
МПК: G01M 1/12
Метки: вращения, оси, положения, ротора
Опубликовано: 23.07.1982
Код ссылки
<a href="https://patents.su/3-945694-sposob-opredeleniya-polozheniya-osi-vrashheniya-rotora.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения положения оси вращения ротора</a>
Электрический двигатель с катящимся ротором с встроенным датчиком положения

Номер патента: 485529
Опубликовано: 25.09.1975
Авторы: Бертинов, Варлей, Гусаров, Моисеев
МПК: H02K 41/06
Метки: встроенным, датчиком, двигатель, катящимся, положения, ротором, электрический
...движок 3 - соосно с ротором 4.Движок 3 потенциометра выполнен в видиска и жестко прикреплен через изоионную прокладку 5 к катку 6 ротора 1 25 4. В корпусе потенциометра размещена кольцевая обмотка 7, которая питается от сети постоянного тока (клеммы А, Б),Сигналом датчика является электрический потенциал, который снимается с движка 3 (клемма В) с помощью измерительного прибора И 11, например, осциллографа, Контактирующие поверхности обмотки 7 и движка 3 кольцевого потенциометрического датчика выполнены коническими.Двигатель со встроенным датчиком работает следующим образом. При равномерном обкатывании ротором 4 двигателя расточки статора 2 точка контакта К движка 3 с обмоткой 7 датчикаперемещается с постоянной угловой скоростью, Величина...
Способ получения зазора между ротором и статором датчика угла

Номер патента: 688813
Опубликовано: 30.09.1979
МПК: G01B 5/14
Метки: датчика, зазора, между, ротором, статором, угла
...нагрузку до выбора зазора между статором, прокладкой иротором, в зазор между статором и основакием вводят заполнитель, полимеризуют его,снимают нагрузку и удаляют прокладку. Способ осуществляется следующимазом. носи быть Для полуи статоромтолщине равго зазора. 3та б статорк ротору 1.статором 8,заполнительпроизводятснимают скокладку 7, ченый зазор м ретени ормула и Способ получения зазора между ротором и статором датчика угла, заключающийся в том, что ротор закрепляют неподвижно, статор располагают на основании датчика с возможностью перемещения, помещают между деталями датчика прокладку, чем обеспечивают зазор между статором .и ротором, отл ич ающи йся тем, что, с целью повышения точности, прокладку помещают между ротором и статором,...
Устройство для суммирования скоростей вращения осей

Номер патента: 48810
Опубликовано: 31.08.1936
Автор: Парецкий
МПК: H03M 1/24
Метки: вращения, осей, скоростей, суммирования
...попеременно приходит в соприкосновение со щетками 111, 112 113 и передает таким образом потенциал плюс через прово-да 121, 122, 123 попеременно на пла-стины 207, 202, 203 коллектора 200., Если последний неподвижен, то каждыйраз, когда пластина 701 касается щет-ки 111, замыкается цепь от плюса, че-рез 701, 111, 121, 201, 211 об иоткуэлектромагнита 1 к минусу, и электро-магнит 1 возбудится. Пульсации электромагнита 1 будут происходить при каждом обороте коммутатора 100, Если коммутатор 200 также придет во вращение, то к перемещению потенциала плюс по пластинам 201, 202, 203 прибавится вращение самих пластин в пространстве,вследствие чего скорость перемещения, потенциала плюс относительно неподвиж-ной щетки 211 соответственно увеличит-ся...
Способ определения положения оси вращения ротора
Номер патента: 977965
Опубликовано: 30.11.1982
Авторы: Бундыч, Дегтярев, Порубаймех
МПК: G01M 1/12
Метки: вращения, оси, положения, ротора
...ро тора, датчик перегрузок устанавливают в произвольном месте, после перемещения его до достижения нулевого уровня сиг10 формула изобретения 3 9779нала датчика перегрузок последний поворачивают на 90 о в плоскости рогора иповторно перемешают датчик перегрузокв этом направлении до достижения нулевого уровня сигнала датчика.На чертеже изображена схема, поясняющая предлагаемый способ.Способ определения положенйя осивращения ротора осуществляется следующим образом.Б произвольном месте на плоскостиротора 1, которая перпендикулярна осиего вращения, устанавливают датчик2 перегрузок в произвольном направленииАА оси его чувствительности. Приводятротор 1 во вращение и на постоянныхоборотах перемешают датчик 2 по направлепию ААиз положения 1...
Способ определения положения оси вращения ротора
Номер патента: 1163168
Опубликовано: 23.06.1985
Автор: Порубаймех
МПК: G01M 1/12
Метки: вращения, оси, положения, ротора
...ротор во вращение относительно вертикальной оси, регистрируют сигнал датчика, останавливаютротор, Фиксируют направление осичувствительности датчика и определяют положение оси вращения ротора,При этом датчик перегрузок перемещают в направлении оси его чувствительности до получения нулевого сигнала, затем поворачивают датчикона 90 и вновь перемещают его дополучения нулевого сигнала, и этоположение датчика соответствуетистинной оси вращения Я .Однако способ недостаточно тех. нологичен,что обусловлено необходимостью монтировать направляющие,которые позволяют перемещать датчикв двух взаимно перпендикулярныхнаправлениях и требуют наличия свободного места.Цель изобретения - повышение технологичности,Поставленная цель достигаетсятем, что...
Предыдущий патент: Способ определения положения главных центральных осей инерции изделий
Следующий патент: Устройство для уравновешивания вращающихся тел
Случайный патент: Пневматический привод для верхнего электрода электрической точечной контактной машины