Способ определения положения оси вращения ротора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 977965
Авторы: Бундыч, Дегтярев, Порубаймех
Текст
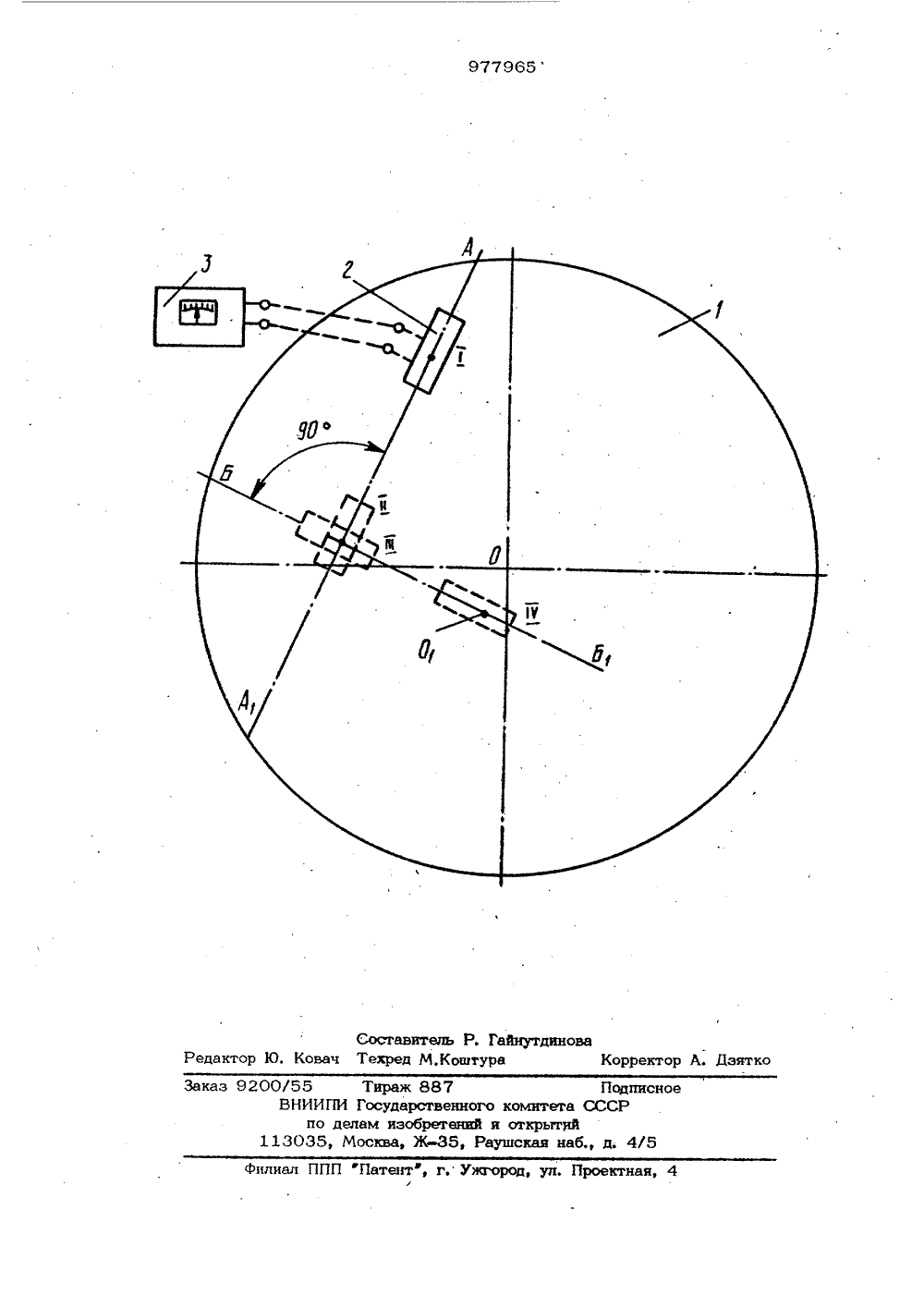
Оп ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТРРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскиСоциапистическиРеспублик и 977965(51)М. Кл. с присоединением заявки И 601 М 1/12 Ркударстаенный кемнтет СССР аю делам забретеннй н втерктнй(23) Приоритет Опубликовано 30,11,82, Бюллетень %44 Дата опубликования описания 30,11,82(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ ВРАШЕНИЯ РОТОРА 1Изобретение относится к измерительной технике н может быть использовано например, для определения оси вращения платформы центробежной машины при из меренин величины перегрузки, действую щей на испытуемое иэделие,. установленное5 на вращающейся платформе.Известен способ определения положе ния оси вращения ротора заключающийся в том, что на полость ротора устанавпи вают датчик, с помошью датчиков измеря ют линейные перегрузки, действующие на ротор в процессе его вращения, и по их значению судят о положении оси враще ния ротора 13,тзНаиболее близким к предлагаемому является способ определения попожения оси вращения ротора, заключающийся в том, что на полость ротора в его гео метрическом центре устанавливают даъ чик перегрузок, приводят ротор во вращение, перемешают датчик по полости ротора в направлении перпендикулярном оси вращения ротора, до достижения ну левого уровня сигнала датчика перегрузок и по месту нахождения центра масс груда чувствительного элемента датчи ка судят о положении оси вращения ротора 21.Однако данные способы характеризуются недостаточной точностью, Эго свя"- зано с тем, что о положении оси вращения ротора судят лишь по одному параметру датчика перегрузок.1.1 ель изобретения - повышение точнос ти.Поставленная цель достигается тем, что согласно способу определения поло жения оси вращения ротора, заключающе муся в том, что на плоскость ротора устанавливают датчик перегрузок, приводят ротор во вращение, перемешают датчик по ппос кости ротора до достижения нулевого уровня сигнала датчика перегрузок, по которому судят о положении оси вращения ро тора, датчик перегрузок устанавливают в произвольном месте, после перемещения его до достижения нулевого уровня сиг10 формула изобретения 3 9779нала датчика перегрузок последний поворачивают на 90 о в плоскости рогора иповторно перемешают датчик перегрузокв этом направлении до достижения нулевого уровня сигнала датчика.На чертеже изображена схема, поясняющая предлагаемый способ.Способ определения положенйя осивращения ротора осуществляется следующим образом.Б произвольном месте на плоскостиротора 1, которая перпендикулярна осиего вращения, устанавливают датчик2 перегрузок в произвольном направленииАА оси его чувствительности. Приводятротор 1 во вращение и на постоянныхоборотах перемешают датчик 2 по направлепию ААиз положения 1 в положениеЙ . При этом уровень сигнала датчика 2,который регистрируется измерительнымприбором 3, связанным с датчиком 2,уменьшается и в положении Й достигаетнулевого уровня сигнала, соответствуюшегнулевой перегрузке. Остановив ротор 1,поворачивают датчик 2 ка угол 90 овплоскости ротора 1, но он занимаетположение 1 И,Приводят платформу во вращение притех же оборотах и перемещают датчик 2в направлении ВБ до положения 5, прикотором сигнал датчика 2 соответствуетнулевой перегрузке. Прекращают перемещение датчика 2 и останавливают вращение ротора 1, При этом место нахождения центра масс груза чувствительногоэлемента датчика 2 перегрузок соответ 65ствует действительному положению оси вращения О ротора 1.Предлагаемый способ позволяет с достаточной точностью судить о положении оси вращения ротора за счет того, что это определение производится по двух- координатной системе. Способ определения положения осивращения ротора, заключающийся в том,что на плоскость ротора устанавливают15 датчик перегрузок, приводят ротор вовращение, перемешают датчик по плоскости ротора до достижения нулевого уровнясигнала датчика перегрузок, по которомусудят о положении оси вращения ротора,20 о т л и ч а ю ш и й с я тем, что, сцелью повышения точности, датчик перегрузок устанавливают в произвольномместе, после перемещения его до достижения нулевого уровня сигнала датчика25 перегрузок последний поворачивают на90 в плоскости ротора и повторно пеоремещают датчик перегрузок в этомнаправлении до достижения нулевого уровня сигнала датчика.Источники информации,принятые во внимание при экспертизе1. Савельев И, В. Курс обшей физики,,М Наука, т.1, 1970,с. 162-166.2, Авторское свидетельство СССР позаявке Мо 2789614/28, кл.601 М 1/12,1979, (прототип).каз 9200/55 Тираж 887 ВНИИПИ Государственн по делам изобрет 113035, Москва, Ж, Подписноего комитета СССРений и открытийРаушская наб., д. 4/5 Патентф, г. Ужгород, ул. Проектная,илиал П
СмотретьЗаявка
3298574, 11.06.1981
ПРЕДПРИЯТИЕ ПЯ В-2289
ПОРУБАЙМЕХ ВЛАДИМИР ИЛЬИЧ, ДЕГТЯРЕВ АНАТОЛИЙ ИЛЬИЧ, БУНДЫЧ ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: G01M 1/12
Метки: вращения, оси, положения, ротора
Опубликовано: 30.11.1982
Код ссылки
<a href="https://patents.su/3-977965-sposob-opredeleniya-polozheniya-osi-vrashheniya-rotora.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения положения оси вращения ротора</a>
Датчик скорости вращения

Номер патента: 533868
Опубликовано: 30.10.1976
Авторы: Бабаков, Милованцев, Науменко
МПК: G01P 3/26
Метки: вращения, датчик, скорости
...расширения и связанных между собой каналами.На чертеже схематически показана конструкция датчика скорости вращения,Датчик состоит из вращающегося корпуса1, центробежного механизма, выполненногов виде грузов 2, связанных сильфонами 3 скорпусом 1, преобразователя давления в осе 5 вое перемещение в виде спльфона 4, соединенного через подшипник 5, например, с исполнительным механизмом 6, и дроссельногоустройства 7. Полости сильфонов соединенымежду собой каналами 8 и заполнены полноО стью жидкостью с малым коэффициентомобъемного расширения,Датчик работает следующим образом.При увеличении числа оборотов грузы 2 поддействием центробежных сил расходятся иоказывают давление на жидкость. Это давление по каналам 8, заполненным...
Датчик скорости вращения

Номер патента: 454477
Опубликовано: 25.12.1974
МПК: G01P 3/44
Метки: вращения, датчик, скорости
...перпендикулярны оси магнита.На чертеже представлена схема предлагаемого датчика скорости вращения.Датчик содержит корпус 1 из немагнитного материала, постоянный магнит 2, имеющий осевую поляризацию, соосно с которым расположены магнитопроводы 3, имеющие в ссчении форму сегмента, Магнитопроводы соединены между собой у полюса постоянного магнита магнитопроводной шайбой 4, а с противоположным полюсом - магнитопроводны ми перемычками 5, на которых расположенысигнальные катушки 6. Приемная часть датчика расположена напротив зубцов 7 (или ферромагнитных вставок) возбудителя 8.Работа датчика основана на использова нии закона электромагнитной индукции. Припрохождении зубцов 7 перед приемной частью датчика происходит замыкание магнитного...
Датчик скорости вращения

Номер патента: 634209
Опубликовано: 25.11.1978
МПК: G01P 3/48
Метки: вращения, датчик, скорости
...общие габариты датчика,Дель изобретения - расширенкедиапазона измерений.634209 Формула изобретения Составитель Е,ШвецовТехред З,Фанта Корректор Н.Ковалева Редактор Т.Иванова аж 1070 Подписи комитета Совета Ми етений и открытий Ж, Раушская наб. оенистров ССС.4/ иал ППП Патент, г.ужгород, ул .Проектная,4 Поставленная цель достигается тем что в датчик скорости дополнительно введены последовательно включенные источник питания постоянного тока и магнитодиод, расположенный в торце сердечника чувствительного элемента, подключенные последовательно с обмотками чувствительного. элемента.На чертеже схематично изображен датчик скорости вращения.Датчик имеет зубчатое колесо 1 иэ ферромагнитного материала, магнит 2, первую систему, образованную...
Датчик частоты вращения

Номер патента: 1352370
Опубликовано: 15.11.1987
Автор: Габидуллин
МПК: G01P 3/487
Метки: вращения, датчик, частоты
...постоянного магнита 1, двух магнитопроводов 2 и 3,расположенных параллельно и присоединенных к одному и тому же полюсупостоянного магнита 1, перемычки 4с измерительными обмотками 5 и 6,расположенной перпендикулярно осивращения индуктора 7 с ферромагнитными зубцами 8." Третий магнитопровод9 размещен между магнитопроводами 2и 3 и закреплен торцом, обращенным кпостоянному магниту, в середине перемычки 4 между измерительными обмотками 5 и 6, Между нижним концом магнитопровода 9 и зубцом 8 индуктора 7имеется зазор 10,Датчик работает следующим образом.При вращения индуктора 7 с частотой Г происходит изменение магнит 30ной индукции в рабочем зазоре 10, чтоприводит к изменению потока сцепления магнитного потока постоянногомагнита 1 с обмотками...
Датчик скорости вращения

Номер патента: 838571
Опубликовано: 15.06.1981
МПК: G01P 3/488
Метки: вращения, датчик, скорости
...оба магнитодиода подключены ко входам суммирую-щего усилителя, выход которого включен последовательно с обмотками сердечника.На чертеже схематически изображен предлагаемый датчик скоростей вращения.Датчик имеет зубчатое колесо 1 из ферромагнитного материала, магнит 2, первую систему, образованную сердечником 3 и обмоткой 4, и идентичную ей по характеристикам вторую систему, образованную также сердечником 5 и обмоткой 6, магнитодиоды838571 Формула изобретения Составитель Е. Швецовор С. Тимохина Техред Н.Бабурка Корректор О, Би Заказ 4418 67 Тираж 907НИИПИ Государственного комитет по делам изобретений и открыт 13035, Москва, 7 Х, Раушская ПодписноСССР бд Проектная, 4 7 и 8, Лаз 9, суммирующий усилитель10 с резисторами 11-14.При...
Предыдущий патент: Грузопоршневой задатчик вакуумметрического давления
Следующий патент: Автомат для контроля герметичности клапанов аэрозольных упаковок
Случайный патент: 184180