Захват манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
ОП ИСАНМВИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическиресиубник(5)М. Кл. В 25 У 15/ОО ГЬвударстввныв комитет СССР ао двлам иэобрвтеикй к атрытяя(54) ЗАХВАТ МАНИПУЛЯТОРА Изобретение относится к очувствленнымпромышленным роботам н манипуляторам,Известен захват манипулятора с тактильны.мн датчиками, содержащий губки, контактирующие при захвате и переносе с объектом,причем на рабочих поверхностях губок размещены тактильные датчики, выполненные в ви.де индукторов н постоянных магнитов, приэтом индукторы соединены коммутационнымицепями с усилителем, а усилитель - с системой управления робота 11,Недостатками указанного устройства являют.ся возможность работы только с металличес.кими объектами, невозможность распознаванияматериала объекта, низкая чувствительность,а также чувствительность к внешним помехам.Цель изобретения - расширение функци(нальных возможностей, повышение надежностии чувствительности работы устройства.Поставленная цель достигается тем, чтотактильные датчики выполнены в виде двухспаев термопар, при этом один спай размещен на рабочей, а другой - на нерабочейповерхности губок, причем термопары включены в два смежных плеча мостовой схемы, водну диагональ которой включен источник питания, а в другую - усилитель, н между усилителем и системой управления введено диф.ференцнруюшее звено.3На фиг, 1 изображена схема устройства;на фнг. 2 - качественные графики измененияТэ в зависимости от материала объекта (Асеребро, б - латунь, Ь - пластмасса); на 6фнг, 3 - графики изменения выходного сигнала днфференцнруюшего звена в зависимостиот материала объекта.Устройство содержит губки 1 и 2, приво.димые в движение с помощью привода (не 13показан) любого типа. На губке 1 закрепленыдва сная 3 и 4 термопар, включенные в смежные ветви 5 и 6 мостовой схемы, при этомспай 3 размещен на рабочей, а спай 4 ча нерабочей поверхности губки 1, К диагоналисодержащей оба сная 3 и 4, подсоединен ис.точннк питания 7, а другая диагональ соединена с усилителем 8 и системой управления9 манипулятора, и мечду усилителем 8 исистемой управления 9 введено лнфференцнрую.863332 5 щее звено 10. Захват пеРемещает объект Схема содержит переменный 12 и постоянный 13 резисторы, предназначенные для ее уравно. вещи вания.Устройство работает следующим образом.При одинаковой температуре спаев 3 и 4, отличной от температуры окружающей среды и создаваемой источником питания 7, мостовая схема полностью уравновешена и сигнал на усилитель 8 не поступает, При движении губок 1 и 2 захвата спай 3 вступает в контакт с объектом 11 и его температура изменяется, приближаясь к температуре объекта 11, Так как теплопроводность материалов, из которых может быть выполнен объект 11, весьма различна (Кт= 45+418 Вт/мград для металлов, К: 0,58 + 1,28 Вт/м.град для неметаллических материалов, где Кт - коэффициент теп. лопроводности), то и скорость изменения температуры спая 3 термопары различна, Величи на термо.ЭДС (ТЭДС), возникающей в цепи, определяется выражением: т,= к,(т - Т 4),где т - ТЭДС;К - коэффициент, зависящий от материа 25лов, составляющих термопару;Ти Т 4 - температуры спаев 3 и 4 соответственно,Так как теллопроводность объектов иэ разных материалов разная, то и отлична скоростьизменения ТЭДС, возникающей в схеме, соответственно различна абсолютная величина сиг.нала, поступающего с дифференцирующего зве.на 10 в систему управления 9 манипулятора,На фиг. 2 кривая Д показывает скорость 55изменения ТЭДС в случае, если объект выполнен из серебра (Кт= 418 Вт/м град), кривая5 для латуни (К.г= 85,5 Вт/м град), кривая 5 - для пластмассы (винипласт) (К.:= 0,126 Вт/м град). Соответственно на фиг.3 40кривые а,б,б показывают величину сигнала,снимаемого с дифференцирующего звена 10.По получении соответствующего сигнала сдифференцирующего звена 10 система управления 9 выдает команды исполнительным органам манипулятора на проведение различныхопераций, Например, транспортер подает дета.ли из разных материалов, а робот переноситих в зависимости от материала к разнымпостам обработки, Скорость изменения температуры сная 3 термопары при контакте собъектом 11 зависит не только от теплопроводности материала объекта 11, но и от массы сная 3, но, очевидно, технологически воз.можно получить спай 3 термопары с ничтожно малой массой, например, методом напыления двух пленок разных металлов и, следовательно, устройство будет обладать оченьвысокой чувствительностью и быстродействием,Использование предлагаемого изобретенияпозволяет получить значительный эффект вобласти очувствленных промышленных манипуляторов и роботов, так возможно созданиеочувствленного робота или манипулятора сраспознаванием любых практических материалов объекта,Формула изобретения Захват манипулятора, содепжащий губки,.на которых установлены тактильные датчики,соединенные через усилитель с системой уп.равления манипулятором, о т л и ч а ющ и й с я тем, что, с целью расширенияфункциональных возмож гостей и повышениянадежности, тактильные датчики выполненыв виде двух спаев термопар, при этом одинспай размещен на рабочей, а другой - ианерабочей поверхностях губок, причем термо.пары включены эо мостовой схеме в двасмежных плеча, причем в одну диагональ мо.стовой схемы включен усилитель, а в другую - дополнительно введенный источник питания, и между усилителем и системой управления дополнительно введено дифференцирующее звено.Источники информации,принятые во внимание при экспертизе1. Патент Японии У 50-2 б 29, кл, В 257 15/00,1975.863332 Рие Рие.З Составитель Т,Техред Л,Пекар Корре Ференц Редактор К. В/25 Тираж 1093 Подни ВНИИПИ Государственного комитета ССС по делам иаобретений и открытий 113035, Москва, Ж - 35, Раушскал наб., д. 4/5
СмотретьЗаявка
2860541, 21.12.1979
ПРЕДПРИЯТИЕ ПЯ В-2438
ПРЯХИН ВАЛЕРИЙ КОНСТАНТИНОВИЧ, КУРДАСОВ ДМИТРИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 15/00
Метки: захват, манипулятора
Опубликовано: 15.09.1981
Код ссылки
<a href="https://patents.su/3-863332-zakhvat-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Захват манипулятора</a>
Механический захват электрических выводов датчика температуры (его варианты)

Номер патента: 1356970
Опубликовано: 30.11.1987
МПК: G01K 7/00
Метки: варианты, выводов, датчика, его, захват, механический, температуры, электрических
...расположенные на верхней губке, попарно соединены с контактными площадками, расположенными на нижней губке (фиг.5). Ч-образный паз 5 и соответствующий ему Ч-образный выступ могут иметь постоянное сечение по всей длине (см. фиг.2 и 3). Однакопрактически более целесообразно выполнить их с сечением, уменьшающимся в направлении от передней кромки губок, причем минимальная ширинасечений паза и выступа должна бытьне меньше ширины датчика температуры,Согласно второму варианту исполнения механический захват электрических выводов датчика температуры,расположенных на противоположных поверхностях датчика, содержит полуюдержавку 14 с крышкой 15, один конецдержавки 14 образует верхнюю губку16 захвата, а одно из плеч детали17 образует нижнюю губку...
Устройство для контроля параметров системы регулирования температуры

Номер патента: 1474483
Опубликовано: 23.04.1989
Авторы: Мелконян, Петросян, Тер-Мартиросян, Шахкамян
МПК: G01K 7/02, G05D 23/19
Метки: параметров, системы, температуры
...исполнительного элемента 16, с помощью которого осуществляется регулирование температуры.Выходной сигнал усилителя поступает также на вход компаратора 12, на5 другой вход которого поступает аварийное значение сигнала от второговыхода двухуровневого задатчика. Когда сигналы на входе компаратора выравниваются, срабатывает компаратор, выходные сигналы которого управляют работой второго исполнительного элемента 13, с помощью которого осуществляется сигнализация при аварий ной ситуации. 3 4По каналу измерения температуры при замыкании контакта переключателя 5. 1 на вход АЦП поступает сигнал с первого выхода двухуровневого задатчика и на цифровом индикаторном табло индицируется требуемое значение установки задания регулируемой температуры...
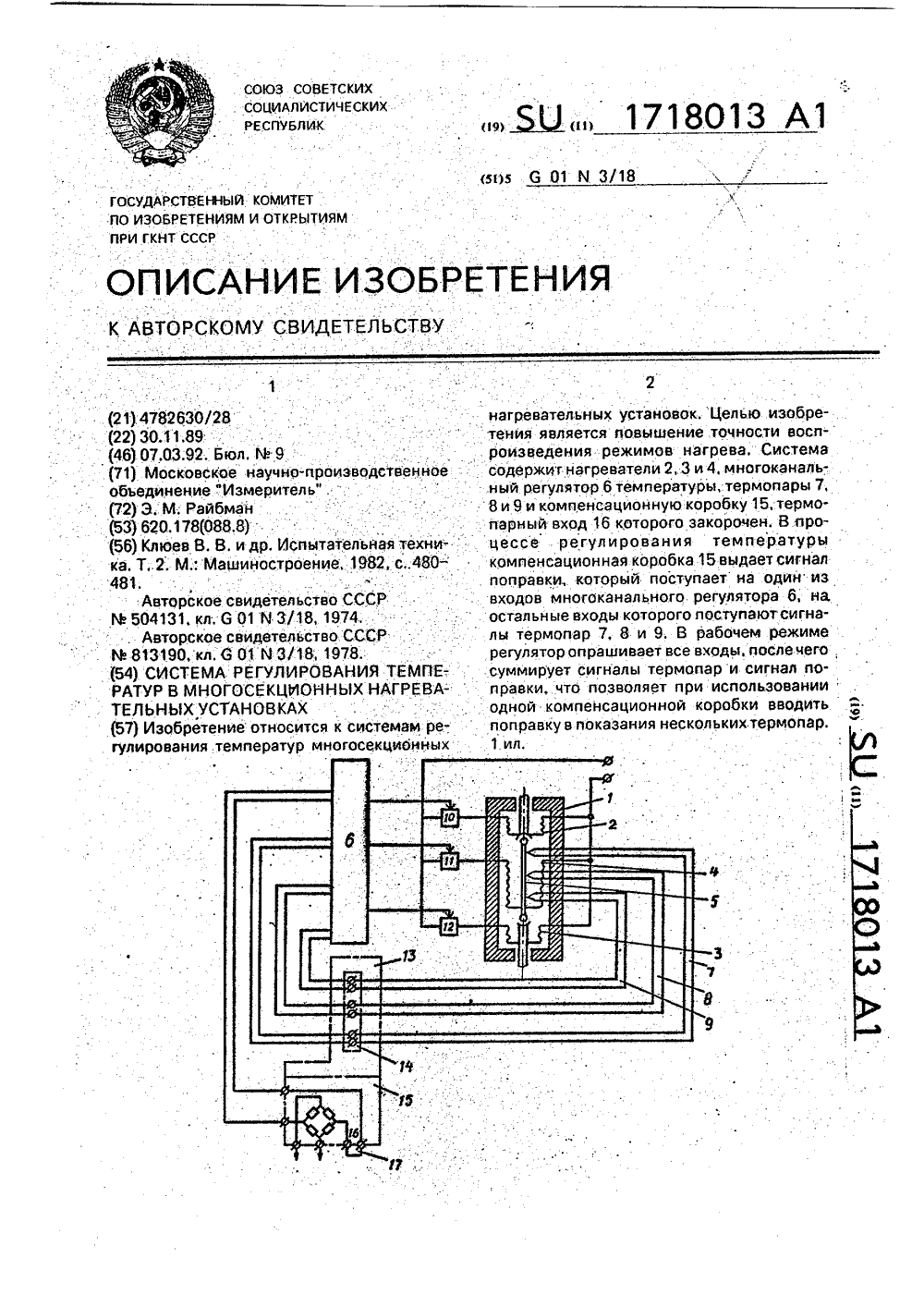
Система регулирования температур в многосекционных нагревательных установках
Номер патента: 1718013
Опубликовано: 07.03.1992
Автор: Райбман
МПК: G01N 3/18
Метки: многосекционных, нагревательных, температур, установках
...на вход соответствующего канала многоканального автоматического регулятора, в котором сравнивается ссигналом, соответствующим заданному.значению температуры, Разность этих сигналов усиливается, преобразуется в соответствии с ПИД - законом регулировани ив виде управляющего сигнала подается науправляемые элементы 10 - 12, которые дозируют мощность, поступающую в нагреватели 2 - 4. Таким образом, температура втрех точках образца поддерживается на заданном уровне автоматически без ручнойподстройки,Термостат представляет собой замкнутый объем, например закрытую со всех сторон металлическую коробку, в которойрасполагаются клеммный набор 14 и компенсационная коробка 15.Изолированность внутреннего объематермостата от внешней среды...
Полупроводниковый датчик температуры

Номер патента: 1740996
Опубликовано: 15.06.1992
Автор: Чурбаков
МПК: G01K 7/02
Метки: датчик, полупроводниковый, температуры
...буферный каскад соединен с выходом усилителя, причем транзистор усилителя согласован с основными транзисторами и выполнен с ними в одном кристалле.На чертеже представлена принципиал ьная схема устройства.Полупроводниковый датчик температуры содержит согласованную пару транзисторов 1 и 2, выполненных в одном кристалле, два резистора 3 и 4 и резистивный делитель 5, включенный относительно общей шины источника 6 питания, к которой подключен эмиттер первого транзистора 1, коллектор и база которого соединены с одним выводом первого резистора 3 и с базой второго транзистора 2, эмиттер которого через резистивный делитель 5 соединен с выходом усилителя, а коллектор - с входом усилителя и с одним выводом второго резистора 4, другой вывод...
Датчик температуры

Номер патента: 1826715
Опубликовано: 10.12.1996
МПК: G01K 7/24
Метки: датчик, температуры
...фиг, 2 зависимость УБьк= (0)Датчик температуры содержит полевой транзистор 1, резистор 2, источник 3 питания измерительного моста 4, образованного транзистором 1, резистором 2 и делителем 5, содержащим последовательно включенные резисторы б и 7, операционный усилитель 8 и выход 9 датчика температуры, При этом резистор 2 подключен первым выводом к выходу источника 3 питания, а вторым к стоку полевого транзистора 1, исток которого соединен с общей шиной. Неинвертирующий вход операционного усилителя 8 соединен с точкой соединения резистора 2 и стока полевого транзистора 1, инвертирующий входс точкой соединения резисторов б и 7, образующих делитель 5, а выход - с затвором полевого транзистора 1 и является выходом датчика температуры.Датчик...
Предыдущий патент: Позиционер
Следующий патент: Захват промышленного робота
Случайный патент: Способ выращивания телят-молочников