Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 849135
Автор: Будилов

Текст
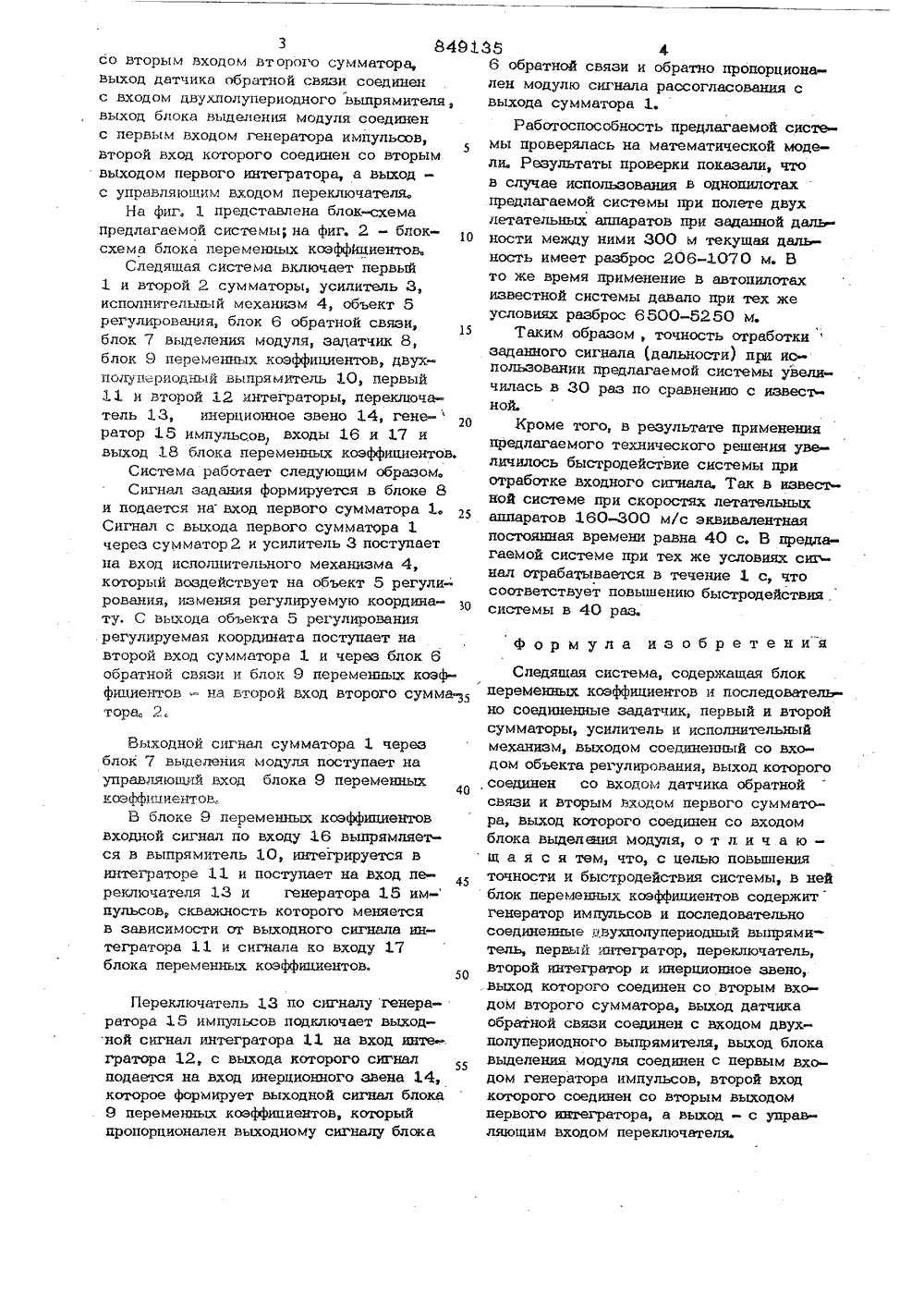
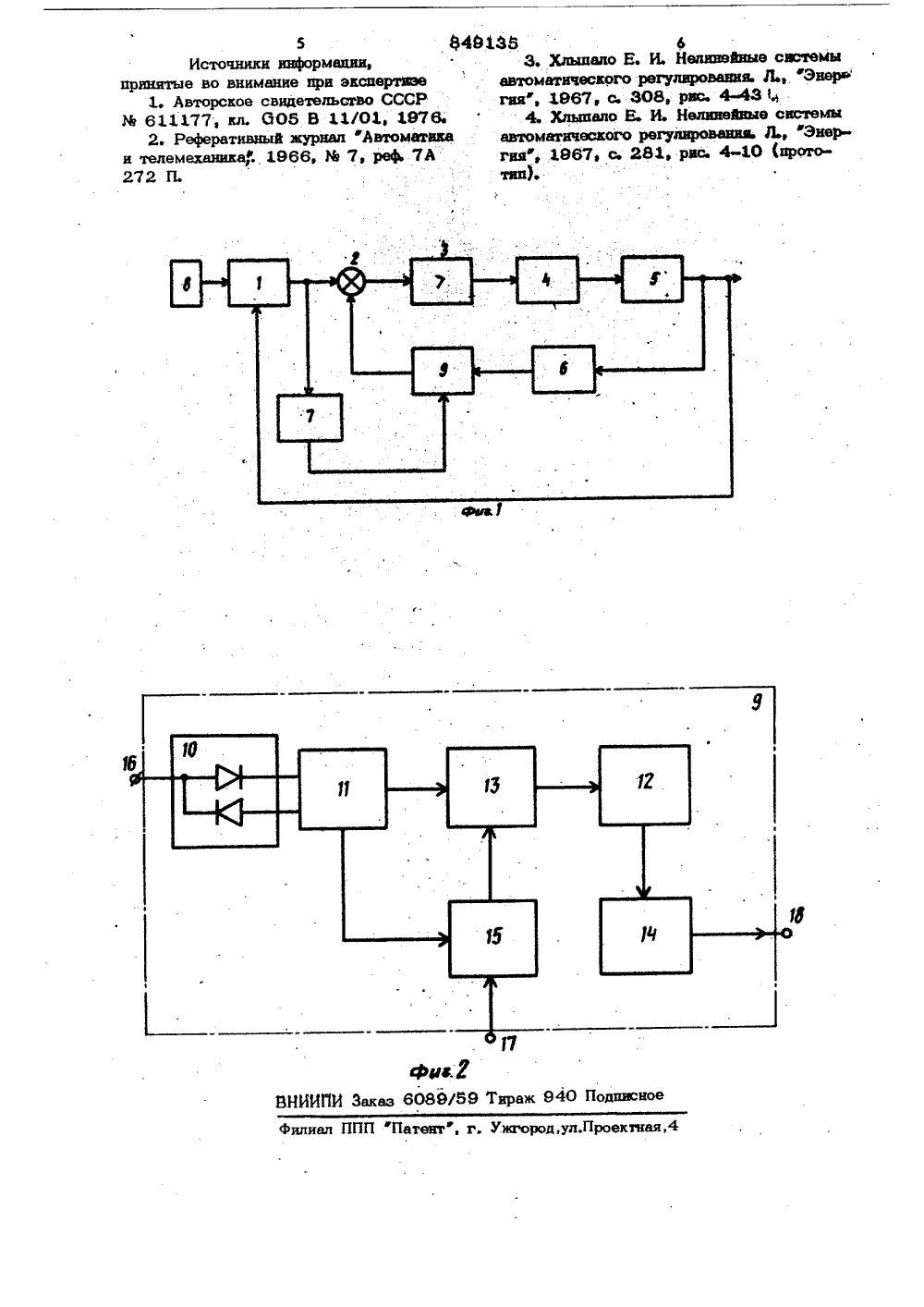
Союз Советски кСоциалистическнкРеспублик ВТОРСКО МУ СВИДЕТЕЛЬСТВУГасударственный коинте 805 В 3) Приоритет СССРделан изобретений н открытий Опубликовано 23.07.81. бюллетень МДата опубликования описания 23.07 З ) УЙ К 62-50оретен В.А,Бу 7 нтель Е ШАЯ СИСТЕМА Изобретение относится к автоматическому регулированию и может быть использовано в нелинейных следящих системах с переменным коэффициентом демпфирования.Известны следящие системы, содержащие последовательно соединенные измери 5 тель рассогласования, сумматор, усилитель и исполнительный двигатель, выход которого соединен.со входом объекта регулирования, выход которого соединенто со входом измерения рассогласования и через последовательно соединенные блок обратной связи и блок переменных коэффициентов - со вторым входом сумматора, вход которого через вычислительное устройство соединен с управляющим входом блока переменных коэффициентов, причем характеристики вычислительного устройст ва и блока переменных коэффициентов выбираются в зависимости от требований к динамике следящих систем 1 1 - 3.Известна также следящая система, содержащая блок переменных коэффициентов и последовательно соединенные задау чик, первый и второй сумматоры, усилитель и исполнительный механизм, выходкоторого соединен со входом объектарегулирования, выход которого соединенсо входом датчика обратной связи и совторым входом первого сумматора, выходкоторого соединен со входом блока выделения модуля 4,Недостатками известной системы являются ее низкая точность отработкивходного сигнала из-за,изменения динамических характеристик в зависимости отизменения параметров объекта регулирсвания при малых значениях входного сигнала и ее невысокое быстродействие.1(ель изобретения - повышение точнооти и быстродействия системы.Поставленная цель достигается тем,что в системе блок переменных коэффициентов содержит генератор импульсов ипоследовательно соединенные двухполупериодный выпрямитель, первый интегратор,переключатель, второй интегратор и инерционное звено, выход которого соединен3 8401 со вторым входом второго сумматора, выход датчика обратной связи соединен с входом двухполупериодного выпрямителя, выход блока выделения модуля соединен с первым входом генератора импульсов,5 второй вход которого соединен со вторым выходом первого интегратора, а выход - с управляющим входом переключателя.На фиг, 1 представлена блок-схема предлагаемой системы; на фиг. 2 - блоксхема блока переменных коэффициентов.Следящая система включает первый 3. и второй 2 сумматоры, усилитель 3, исполнительный механизм 4, объект 5 регулирования, блок 6 обратной связи, блок 7 выделения модуля, задатчик 8, блок 9 переменных коэффициентов, двухполупериодный выпрямитель 3,0, первый 13, и второй 3.2 интеграторы, перекшочатель 3.3, инерционное звено 3.4, гене-ратор 3.5 импульсоВ, Входы 16 и 3.7 и выход 18 блока переменных коэффициентов.Система работает следующим образом.Сигнал задания формируется в блоке 8 и подается на вход первого сумматора 3 Сигнал с выхода первого сумматора 3. через сумматор 2 и усилитель 3 поступает на вход исполнительного механизма 4, который воздействует на объект 5 регулирования, изменяя регулируемую координа- щ ту. С выхода объекта 5 регулирования регулируемая координата поступает на второй вход сумматора 3. и через блок 6 обратной связи и блок 9 переменных коэффициентов - на второй вход второго сумматора. 2.Выходной сигнал сумматора 3. через блок 7 выделения модуля поступает на управляющий Вход блока 9 переменных40 коэффициентов,В блоке 9 переменных коэффициентов входной сигнал по входу 16 вьшрямляерся в выпрямитель 3.0, интегрируется в интеграторе 3.3. и поступает на вход переключателя 3.3 и генератора 3.5 им- пульсов, скважность которого меняется в зависимости от выходного сигнапа интегратора 3.3. и сигнала ко входу 3.7 блока переменных коэффициентов.Переключатель 3,3 по сигналу генераратора 3,5 импульсов подключает выходной сигнал интегратора 3.3. на вход интегратора 3,2, с выхода которого сигнал подается на вход инерционного звена 3.4, которое формирует выходной сигнал блока 9 переменных коэффициентов, который пропорционален выходному сигналу блока 35 46 обратной связи и обратно пропорционален модулю сигнала рассогласования свыхода сумматора 3Работоспособность предлагаемой системы проверялась на математической модели. Результаты проверки показали, чтов случае использованля в однопилотахпредлагаемой системы при полете двухлетательных аппаратов при заданной дальности между ними 300 м текущая дальность имеет разброс 206-3.070 м. Вто же время применение в автопилотахизвестной системы давало при тех жеусловиях разброс 6500-5250 м.Таким образом, точность отработкизаданного сигнала дальности) при использовании предлагаемой системы увеличилась в 30 раз по сравнению с извесгной.Кроме того, в результате примененияпредлагаемого технического решения увеличилось быстродействие системы приотработке входного сигнала, Так в известной системе при скоростях летательныхаппаратов 3.60-300 м/с эквивалентнаяпостоянная времени равна 40 с. В предлагаемой системе при тех же условиях сихнал отрабатывается в течение 3, с, чтосоответствует повышению быстродействии,системы в 40 раз,Формула изобретенияСледящая система, содержащая блок переменных коэффициентов и последовательно соединенные задатчик, первый и второй сумматоры, усилитель и исполнительный механизм, выходом соединенный со входом объекта регулирования, выход которого соединен со входом датчика обратной связи и вторым входом первого сумматора, выход которого соединен со входом блока выделщия модуля, о т л и ч а ю - щ а я с я тем, что, с целью повьппения точности и быстродействия системы, в ней блок переменных коэффициентов содержитгенератор импульсов и последовательно соединенные двухполупериодный выпрямитель, первый интегратор, переключатель, второй интегратор и инерционное звено, . выход которого соединен со вторым входом второго сумматора, выход датчика обратной связи соединен с входом двухполупериодного выпрямителя, выход блока выделения модуля соединен с первым входом генератора импульсов, второй вход которого соединен со вторым выходом первого интегратора, а выход - с управляющим входом переключателя.
СмотретьЗаявка
2833277, 29.10.1979
ПРЕДПРИЯТИЕ ПЯ А-7162
БУДИЛОВ ВЛАДИМИР АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 23.07.1981
Код ссылки
<a href="https://patents.su/3-849135-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Делитель с переменным коэффициентом деления

Номер патента: 481138
Опубликовано: 15.08.1975
Авторы: Веселовская, Каличев, Ковалев
МПК: H03K 23/02
Метки: деления, делитель, коэффициентом, переменным
...и прекратится выходной импульс делителя с переменным коэффициентом деления. Для устранения этого сигнал с выхода и-го разряда счетчика 1 с постоянным коэффициентом счета подается на вход логического элемента И 7, второй вход которого соединен через инвертор 8 с выходом устройства сравнения кодов 2.И после того, как код нового коэффициента будет переписан из сумматора 4 в регистр 3, код числа в регистре 3 превысит код числа Б счетчике 1 с постоянным коэффициентом счета и импульс на выходе устройства сравнения кодов 2 прекратится, выходной сигнал логического элемента И 7 возвращает иый разряд счетчика 1 с постоянным коэффициентом счета и регистра 3 в исходное состояние и вновь делитель с переменным коэффициентом деления работает до...
Калибратор переменных напряжений

Номер патента: 920664
Опубликовано: 15.04.1982
МПК: G05F 1/44
Метки: калибратор, напряжений, переменных
...генератор;ЮДСОЕДИНЕН КО /с,ХО;Р РЕГУЛИРУК)/ЦЕГО ЗВ(- цд ., В свою черсдь 1 ыход регли/руО;ЦЕГО ЗВЕНа 1/ОсСОС;ИЦЕ 3 КО ВХОДУ УСЦЛЦтЕ/ОГО с.СЛСгорс) 1(с. Г СК)К) О ЕПДЬ ц/г/Х ;/сггсгг) гс с с(3(ггц 30 с) пе гсс/ с г 2 10 10 3 10 . сн КО 1)хо, элскт,0 3 0/х ицтср 21 01) а, Об . с 3: ) 15 3 Ц:. Ы 31 .) с З 51 СТ (Р с". / Ц с;"с И, д, Г и- .:;ц 6 и 7 цэс./ д 5 Ель/ого о-)д(Я, КОНГгсгс:.ССЗГО/)( .", // ЭЛСК"ПОИ/1)3 лителем 13. При этом вход интегратора через резистор 11 подсоединен к общей точке соединения конденсатора 12, элеегронного усилителя 13 и резистора 15. К обшей ТОЧКЕ СОСДц/Еця рЕЗстгораЭ;1 ЕК/рОННО - ГО силнГеля 13 и кО/дс:1 сдто/га 12 цодсо(. - ДЦНЕН ВОД ОЕЗИСТИВЦО 0 ДЕЛИТСЛ 51 НВПРЯЖС- ния 512 рс.сгиеторсзх 14 и 1 э....
Многоканальная система для контроля и диагностики цифровых блоков

Номер патента: 1269137
Опубликовано: 07.11.1986
Авторы: Баранов, Гобжила, Гроза, Иваненко, Карабаджак, Касиян, Кац, Кошулян
МПК: G06F 11/22
Метки: блоков, диагностики, многоканальная, цифровых
...для проверки изделия 3 (в исходных данныхзадаются имя изделия, режим контроля и другая информация), нажатиемна клавишу программного прерыванияустройства 5 выставляет требованиена обслуживание данного поста состороны ЭВМ 1.На дешифратор 94 коммутатора 2(фиг. 2) поступает слово состояния из устройства 5 с идентификатором "Внимание", При этом опрос прекращается и узел 90 управления Формирует сигнал прерывания, поступающий через интерфейсные усилители 37 75 в ЭБМ 1. Б дальнейшем выполняется последовательность выборки устройства, в процессе которой через усилители 75 в ЭВМ 1 с генератора 76передается адрес коммутатора 2, сосчетчика 77 адрес устройства, затребовавшего обслуживание от ЭБМ, срегистра 89 байт состояния.Из ЭВМ 1 через...
Способ определения температурного коэффициента работы выхода материала

Номер патента: 1504687
Опубликовано: 30.08.1989
Метки: выхода, коэффициента, работы, температурного
...П; осуд 8 Дьюра,с таящим льдом; приор 9, регистрирующий полезный сигнал 1 о35Способ реализуется следующим образом.Исследуемый образец (О) размеают с небольшим зазором напротив талонного образца (Э) рабочими по- щерхностями навстречу друг другу.существляют модуляцию температуры образца по периодическому закону с мплитудой йТ/Т ( 1, где Т - рабоая.температура образца, Одновремено по такому же закону производят одуляцию внешнего напряжения Б(й), сли работа выхода ц материала зао висит от температуры, то модуляция Т приводит к модуляции контактнойразности потенциалов Пмежду Э й О. Между ббкладками Э и О рассматриваемого конденсатора появится пе 1 еменное напряжение, обусловленное изменением 0И) и внешним напрязением 1(й), и возникнет...
Калибратор переменного напряжения

Номер патента: 1610475
Опубликовано: 30.11.1990
МПК: G05F 1/44
Метки: калибратор, переменного
...блока 2,суммирующие входы сумморазпостногоблока соответственно подключены к вы"ходной шине и к источнику 5 опорногонапряжения, а вычитающий вход под", ключен к выходу второго управляемогомасштабного преобразователя 8, вхоцомсоединенного с источником 5 опорногонапряжения. 40В качестве регулируемого блока,2могут быть использованы оптроны, диоды или полевые транзисторы, компара"тор 4 может представлять собой дифференциальную схему включения амплитудных детекторов или преобразователей средневыпрямленных значений,сумморазностный блок 9 в зависимостиот частотного диапазона калибратораможет быть выполнен на операционномусилителе или дискретных элементахВ качестве управляемых масштабныхпреобразователей могут быть использованы серийные...
Предыдущий патент: Электрогидравлическая следящаясистема
Следующий патент: Трехпозиционный регулятор
Случайный патент: Гидравлическое устройство ударного действия