Электрогидравлическая следящаясистема
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскнкСоцналнстнческнаРеспублик(23) Приоритет ао делам изобретений и открытий(54) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯСИСТЕМА системы 2. 1Изобретение относится к технике следящих приводов, в частности к электро-гидравлическим следящим системам, предназначено для автоматического управлениямашинами и аппаратами, может найти применение в системах автоматического управления.Известны электрогидравлические следящие системы, содержащие датчики входного сигнала, электронные усилители ситъ 1 О нала рассогласования, гидродвигатели с электромеханическим преобразователем на входе и с гидроусилителем, датчикивыходного сигнала, нагрузку 11 ф15Недостатком этих ус зройств является температурная нестабильность статических и динамических характеристик, которые определяются в основном температурной нестабильностью скоростных характеристико гидродвигателя с гидроусилителем, т.е. завйсимости скорости гидродвигателя от тока управления, подаваемого в обмотку управления электромеханического преобразователя от электронного усилителя и изменением коэффициента добротности следящего привода в зависимости от условий эксплуатации. Известно, что для улучшения чувствительности и динамики электро- гидравлической следящей системы вводятся осциллирующие движщия (вибрации) золотника гидроусилителя с большой частотой и малой амплитудой. Температурная стабильность скоростной характеристики гидродвигателя в этом случае практически не изменяется.Наиболее близкой по технической сущности к предлагаемой является электро- гидравлическая следящая система, содержащая последовательно соединенные генератор осциллирующего сигнала, преобразователь напряжение-ток, . электромеханн ческий преобразователь, гидродвигатель с гидроусилителем, датчик обратной связи, выход которого соединен со вторым вхо дом преобразователя напряжение-ток, третий вход которого соединен со Ъходом84 ЙМ 4 35 Недостатком этого устройства являетсятемпературная нестабильность характеристик сскорости отработки задающего сигнала, переходного процесса, частотныххарактеристик, быстродействия), вызван 5ная зависимостью скоростной характеристики гидродвигатепя при постоянном входном токе управления от температурырабочей жидкости в гидродвигателе. Всвязи с тем, что рабочая жидкость в исполнительном гидродвигатепе с гидроусипителем, как правило, циркулирует в замкнутом ограниченном объеме и гидродвига;тель подвергается воздействию высокихтемператур, например, при управлении Рулями летательных аппаратов, его скоростная характеристика может изменяться взначительных пределах (в два и болеераза). Кроме того, постоянная времениобмотки управления электромеханическогопреобразователя, величина которой зависитот внутреннего сопротивления усилителяв рассматриваемой следящей системе,значитепьно ухудшает ее быстродействие,так как она практическй не компенсируется из-за низкого выходного сопротивленияусилителя. Все это ограничивает применение рассматриваемой следящей системыв высокочастотных быстродействующихсистемах автоматического управления зомашинами и аппаратами,Цель изобретения - повышение точности электрогидравлической следящей системы,Указанная цель достигается тем, что система содержит последовательно соединенные фильтр вьщеления высокой частоты, амплитудный детектор с усреднением, инвертор и первый нелинейный усипитепь 4, с зоной нечувствительности, а также источник опорного напряжения и второй, третий и четвертый нелинейные усипители с зоной нечувствительности, причем вход фильтра вьщепения высокой частоты сое динен с выходом преобразователя напряжение-ваток, выходы первого и второго нелинейного усилителя с зоной нечувствительности соединены, соответственно, с четвертым и пятым входами преобразоватепя нюржение-ток, а ключевые входы - с выходами третьего и четвер. гого нелинейного усилителя с зоной нечувствительности, входы которых соединены с выходом датчика обратной связи, вход второго нелинейного усилителя с зоной нечувствитепьности соединен со входом инвертора, первый выход источника опорного напряжении соединен со вторыми входами первого и третьего нелинейного усилителяс зоной нечувствительности, а второйвыход - со вторыми входами второго ичетвертого нелинейного усилителя с зонойнечувствительности.На чертеже представлена блок-схемапредлагаемого устройства,Оно состоит из преобразователя 1напряжение гок, эпектромеханическогопреобразователя 2, гидродвигателя с гидроусипитепем 3, нагрузки 4, датчика 5обратной связи, фильтра 6 выделения высоких частот, амплитудного детектора 7с усреднением инвертора 8, нелинейныхусилителей 9 - 12 с зоной нечувствитепьности, источника 13 опорного напряжения,генератора 14 осциплирующих. колебаний.Предлагаемое устройство работает следующим образом,В исходном попожении на вход преобразователя 1 напряжение гок с генератора14 осциллирующих колебаний поступаетсинусоидапьный сигнал О, , частотакоторого значительно превышает частотурабочего сигнала Ор, а амплитуда токаосциппирующего сигнала 1 осцв обмоткеуправления электромеханического преобразователя 2 обычно составляет часть отмаксимапьного тока управления 1 у с,кс,т е 10 сц с 011 у мОкс В процессеработы устройства происходит разогреврабочей живости и, спедоватепьно, изменение сопротивления обмотки управленияэпектромеханического преобразователя 2,которая, как правило, выполняется медным проводом. В связи с тем, что преобразователь 1 напряжение гок поддерживает амплитуду тока 1 осцв обмотке управпения эпектромеханического преобразоватепя 2 неизменной, то изменение напряжения осцилпирующего сигнала пропсрционально изменению температуры рабочейжидкости в гидродвигателе и, следовательно, изменение его скоростной характеристики. Изменение напряжения осцилпирующего сигнала выделяется с помощью фильтра 6 выделения высоких частот и амплитудного детектора с усреднением 7, такчто на его выходе образуется медленно:меняющееся напряжение Ь О, пропорциональное зависимости скоростной характеристики гидродвигателя иг температурырабочей жидкости. Нелинейные усилители 9 - 12 с зоной нечувствительности пропускают сигналы одной полярности, причем блоки 9 и 11 пропускают отрицательно сигналы, а блоки 10 и 12 - положительные сигналы.5 8491 Опорные налряжения + Оо, поступающие с источника 13 опорных напряжений, подключены ко вторым входам блоков 9 - 12 и выбраны такой величины, чтобы при отсутствии входного сигнала эти блоки не реагировали на случайные флуктуирующие сигналы в зоне нечувствительности устройства. Кроме того, блоки 9 и 10 имеют ключевые входы, при подаче сигнала на которые эти блоки запираются. Бло о кн 9 - 12 инвертируют входной сигнал.При наличии входного сигнала положительной полярности + 0 на выходе датчика обратной связи образуется сигнал отрицательной полярности - Ощ, на выходе блока 12 сигнал Ооп, закрывающий ключ 10, отсутствует и с выхода детектора 7 компенсирующее напряжение Ь О проходит через блок 10 на вход преобра зователя 1 напряжение ток, при этом изменяется его коэффициент передачи и уменьшается сигнал управления 1 таким образом, что сохраняется скоростная характеристика гидродвигателя неизменной. Следовательно, неизменным сохраняется 2 и коэффициент добротности следящей системы, что свидетельствует о температурной стабильности характеристик устройства. Кроме того, высокое выходное сопротивление преобразователя 1 напряжениеток резко снижает и стабилизирует постоянную времени обмотки управления электро- механического преобразователя 2, при этом повышается быстродействие устройства. На выходе ключа 11 присутствует сигнал 0 , который закрывает блок 9, и компенсирующее напряжение ЬО с выхода инвертора 8 не проходит на вход преобразователя 1 напряжение-чок. При подачена вход устройства сигнала отрица-. 4 О тельной полярности - О на выходе датчика обратной связи 5 образуется сигнал положительной полярности + 0, который поступает на входы ключей 11 и 12. В этом случае на выходе блока 12 4 образуется сигнал - О оп, который закрывает блок 10 и компенсирующее напряжение ЬО не поступает на вход преобразователя 1 напряжение-ток. В то же время сигнал с выхода ключа 11 не поступает я на ключевой вход блока и компенсирующее напряжение - Ь О с инвертора 8 через блок 9 поступает на вход преобразователи 1 напряжение-ток, компенсируя изменение скоростной характеристики гидродвигателя.; Элементы предлагаемого устройства, также как преофаэователь напряжениеток, амплитудный детектор, нелинейные 34 6усилители с зоной нечувствительности, инвертор, фильтр выделения высокой частоты могут быть выполнены на единой микросхемной элементной базе, в частности, на интегральных операционных усилител яхтПо сравнению с известным устройством в предлагаемой электрогидравлической следящей системе повышена температурная стабильность в связи с введением сигнала на вход преобразователя напряжение-ток, компенсирующего изменение скоростной характеристики гидродвигателя при разогреве рабочей жидкости, и быстродействие за счет высокого внутреннего сопротивления преобразователя напряжение ток. Все это позволяет повысить точность устройства и испольэовать его в высокочастотных ароматических системах управления машинами и аппаратами. Кроме гого, применение единой микроэлекъ ронной базы позволяет повысить.уровень микроминиатюризации устройства.формула изобретенияЭлектрогидравлическая следящая система, содержащая последовательно соединенные генератор осциллируюшего сигнала, преобразователь напряжение ток, электромеханический преобразователь, гидродвигатель с гидроусилителем, датчик обратной связи, выход которого соединен со вторым входом преобразователя напряжение ток, третий вход которого соединен со входом системы, о т л и ч а ю ш а я с я тем, что, с целью поашения точности, система содержит последовательно соединенные фильтр выделения высокой частоты, амплитудный детектор с усреднением, инвертор и первый нелинейный усилитель с зоной нечувствительности, а также источник опорного напряжении и второй, третий и четвертый нелинейные усилители с зоной нечувствительности, причем вход фильтра выделения высокой частоты соединен с выходом преобраэсвателя напряжение-ток, выходы первого и второго нелинейного усилителя с зоной нечувствительности соединены, соответственно, с четвертым и пятым входами преобразователя напряжение ток, а ключевые входы - с Выходами третьего и четвертого нелинейного усилителя с зоной нечувствительности, выходы которых соединены с выходом датчика обратной связи, вход второго нелинейного усилителя с зоной нечувствительности соединен со входом инвертора, первый выход источника опорного напряжения соедийен со вторымиВНИИПИ Заказ 6089/59 Тираж 940 Подписно П Патент, г,Ужгород, ул, Проектная, 4 Филиа входами первого и третьего нелинейногоусилителя с зоной нечувствительности,а второй выход - со вторыми входамивторого и четвертого нелинейного усилителя с зоной нечувствительности.Источники информации,принятые во внимание при экспертизе 849134 8 1. Авторское свидетеьство СССР И 292139, кл. 005 В 1 М 01, 3,971. 2. Гамынин Н. С. Основы следящего гидравлического привода. М Оборонгиз, 1962, с. 122, рис, 5,1 (прототип) .
СмотретьЗаявка
2833178, 25.10.1979
ПРЕДПРИЯТИЕ ПЯ Г-4152
ФОМИН НИКОЛАЙ МАКСИМОВИЧ, ФРОЛОВ МИХАИЛ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящаясистема, электрогидравлическая
Опубликовано: 23.07.1981
Код ссылки
<a href="https://patents.su/4-849134-ehlektrogidravlicheskaya-sledyashhayasistema.html" target="_blank" rel="follow" title="База патентов СССР">Электрогидравлическая следящаясистема</a>
Электронно-оптический преобразователь для трансформации сигнала в волоконно-оптических линиях связи
Номер патента: 1342338
Опубликовано: 27.07.1996
Авторы: Арм, Балаев, Воробьев, Зайдель, Кутенин, Мишин, Пятахин, Соколов
МПК: H01J 31/50
Метки: волоконно-оптических, линиях, связи, сигнала, трансформации, электронно-оптический
Электронно-оптический преобразователь для трансформации сигнала в волоконно-оптических линиях связи, содержащий последовательно расположенные полупрозрачный фотокатод, расположенный на внутренней поверхности входного окна управляющий цилиндрический электрод, аксиально симметричный цилиндрический анод и люминесцентный экран, расположенный в плоскости кроссовера, совпадающей с торцовой плоскостью аксиально-симметричного цилиндрического анода, отличающийся тем, что, с целью снижения потерь при вводе и передаче сигнала по волоконно-оптической линии связи, дополнительно содержит диафрагму с отверстием радиусом 3,8 4,2 мм, входное окно выполнено в виде волоконно-оптической планшайбы с вогнутой внутренней поверхностью радиусом 30,4 40,4 мм,...
Регулятор напряжения для преобразователя переменного тока в постоянный

Номер патента: 909787
Опубликовано: 28.02.1982
Автор: Канашев
МПК: H02P 13/16
Метки: переменного, постоянный, преобразователя, регулятор
...управляющая цепь второго аналогового ключа соединена с выходом логического блока первого выпрямителя.На чертеже схематически изображен 4 О принцип работы регулятора.Регулятор содержит операционные усилители 1 и 2, соединенные выходами с управляющими входами блоков 3 и 4 системы импульсно-Фазового управления (СИФУ) преобразователя с 4 выпрямителями 5 и 6, соединенных также с логическими блоками 7 и 8, формирующими разрешение или запрет работы СИФУ, датчик 9 выходного напряжения преобразователя, датчики 10 и 0 11 тока выпрямителей, элемент 12 задания уровня стабилизации выпрямленного напряжения, элемент 13 сравнения выходного напряжения преобразователя с заданным его значением, элементы 55 14 и 15 сравнения токов нагрузки выпрямителей и...
Регулятор напряжения для преобразователя переменного тока в постоянный

Номер патента: 1229913
Опубликовано: 07.05.1986
Автор: Канашев
МПК: H02M 1/08
Метки: переменного, постоянный, преобразователя, регулятор
...обратной связи через датчик 9 напряжения и элемент 13 сравнения на операционные усилители 1 и 2, формирующие управляющие уровни для блоков 3 и 4 СИФУ, являющихся исполнительным органом регулятора и формирующих импульсы управления: тиристорами выпрямителей 5 и 6 с соответствующим углом управ-: ления, определяющим величину выпрямленного напряжения. Равномерность распределения тока .нагрузки между выпрямителями подстраивается с помощью элементов 14 и 15 сравнения, сравни- . вающими токи выпрямителей 5 и 6 и сигналами элементов 18 и 19. Заданное распределение тока нагрузки,сохраняется в процессе работы преобразователя, Если один выпрямитель, например 6, в процессе работы бтключается защитой, логический блок 8 запрещает работу блока 4 СИФУ,...
Измерительный преобразователь среднего значения переменного тока в постоянное напряжение

Номер патента: 667906
Опубликовано: 15.06.1979
МПК: G01R 19/22
Метки: значения, измерительный, напряжение, переменного, постоянное, среднего
...пропорциональноепрсреднему значению тока во входной обмотке тран-На чертеже представлена функциональная схе-" 15 сформатора 1, снимается с выхода усилителя 11.ма измерительного нреобразователя среднею зна.чения переменного токав постоянное напряжение,При достаточно большом значении коэффициОписываемый преобразователь одерит тан ента усиления усилителя переменного напряжесформатор 1, имеющий входную обмотку 2, вь.ния б в сердечнике трансформатора происходит1ходную обмотку 3 и обмотки обратной связи 4 2 о практически полная компенсация магнитных по.и 5, усилитель неремейного напряжейия б, инвер. токов. При этом среднее значение суммарного тотор 7; вентили 8 и 9, конденсатор 10,.усилитель каобмоток обратной связи пропорционально...
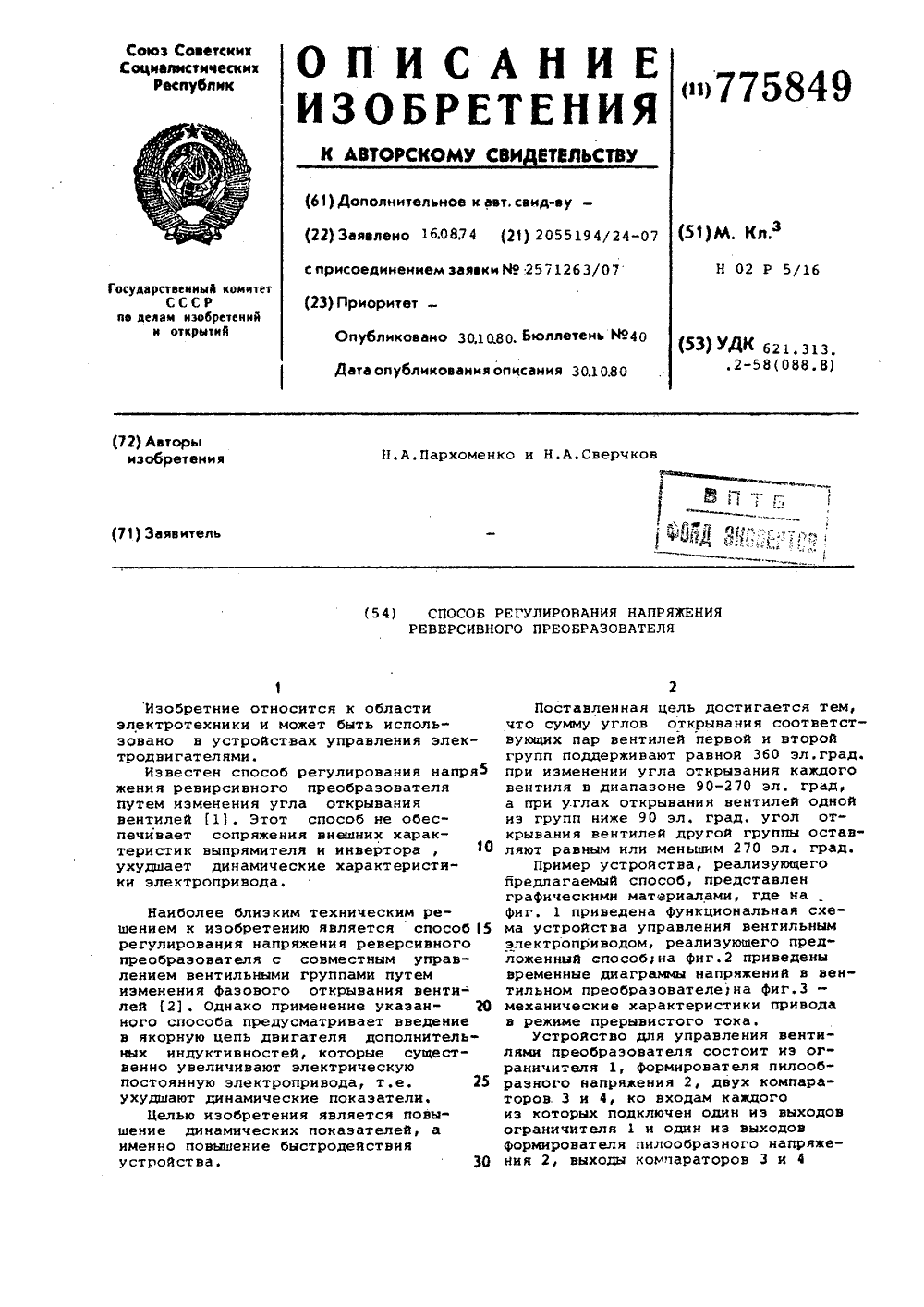
Способ регулирования напряжения реверсивного преобразователя
Номер патента: 775849
Опубликовано: 30.10.1980
Авторы: Пархоменко, Сверчков
МПК: H02P 5/16
Метки: преобразователя, реверсивного
...запряжением питания и направлен против Е , т.е, двигатель потребляет энергию от источника. Вентиль 5 притаком соотношении сигналов не открывается, так как в момент временисоответствующий с. анодное напряжениена нем отрицательное. При уменьшенииуправляющего сигнала угол 46 увеличивается, в результате чего вентиль6 перестает открываться, а 3. уменьшается, Анодное напряжение вентиля5 становится положительным, он открывается, а создаваемый разницей напряжения питания и ЭДС якоря двигателяток совпадает по направлению с Еи нацравлен против напряжения питаният.е. двигатель отдает энергию в сеть.Так как пилообразные напряженияна первых входах компараторов имеют одинаковую амплитуду, а на вторые входы поступает одно напряжениеуправления, в...
Предыдущий патент: Следящая система
Следующий патент: Следящая система
Случайный патент: Устройство для определения величины и знака разности двух частот