Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
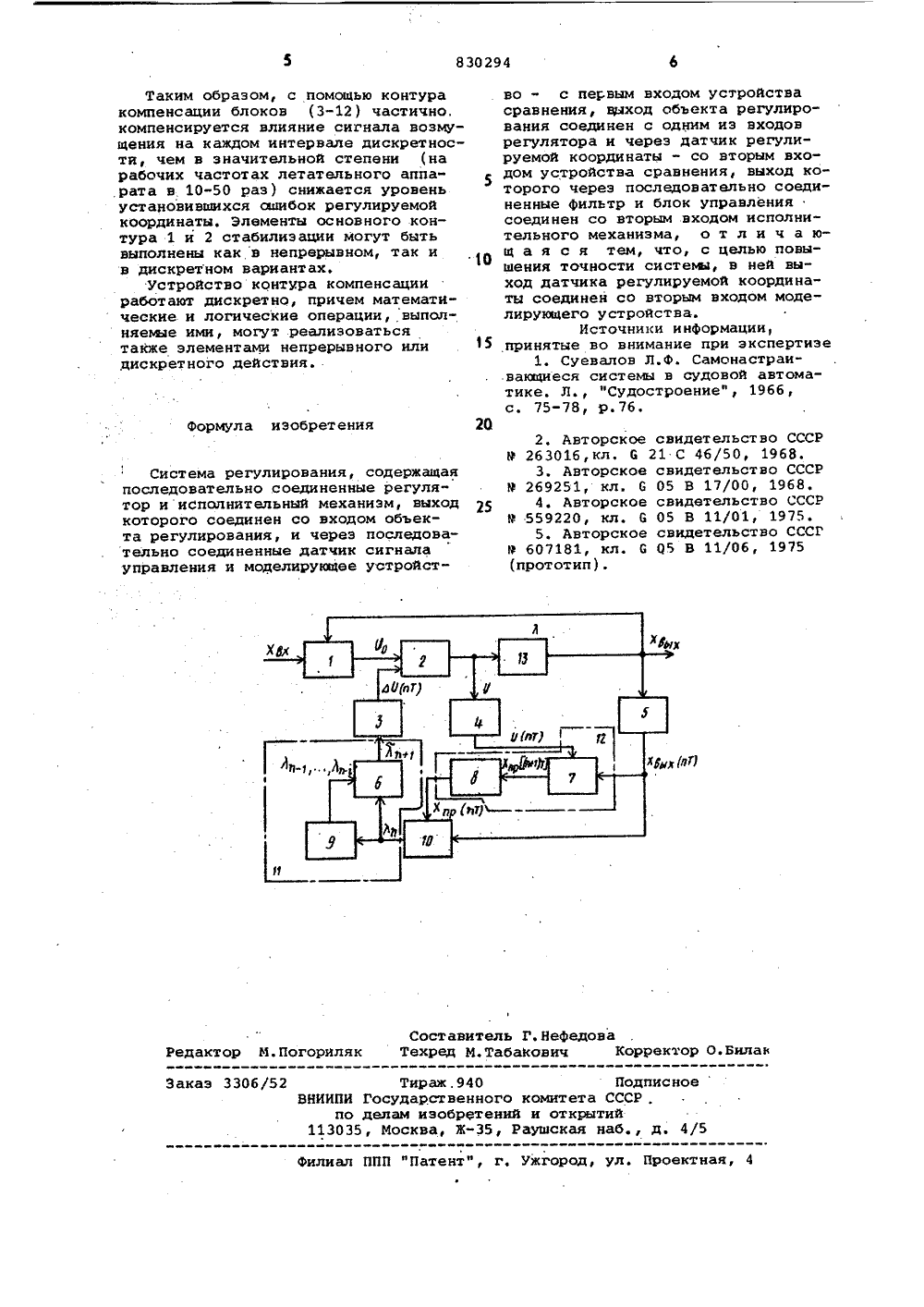
Союэ Советских Социалистических Республик(61) Дополнительное к авт, свид-ву(22) Заявлено 073879 (21) 2808020/18-24с присоединением заявки Нов(51) М. Кл.з С 05 В 11/00 Государствеииый комитет СССР по аслам изобретений и открытий(54) СИСТЕМА РЕГУЛИРОВАНИЯ Изобретение относится к автоматике и может быть использовано при управлении летательными аппаратами всевозможных классов, кораблями и судами на воздушной подушке.Известна система регулирования, содержащая последовательно соединенные измеритель рассогласования, регулятор и исполнительный механизм, выход которого соединеч со входом объекта регулирования, выход которого соединен с одним из входов измерителя рассогласования, и измерители величины возмущения, действунхяего на объект, выход которого через. функциональный преобразователь соединен со вторым входом регулятора, причем измеритель формирует информацию о величине возмущения как пряьим путем (т.е. непосредственным измерением сигнала возмущения), так и косвенным,(т.е, по измерениям сигнала управления и регулируемой координаты)(1.Известны системы регулирования, содержащие последовательно соединенные иэмеритель рассогласования, регулятор и исполнительный механизм, вход которого соединен со входом объекта регулирования и через последовательно соединенные датчик сигнала управления и модель объектас первым входом блока сравнения,выход объекта регулирования соединен с одним из входов измерителя рассогласования и через датчик регулируемой .координаты со вторым входомблока сравнения, выход которого через Фильтр и Формирователь корректи 10 рующего сигнала соединен либо совторым входом регулятора, либо совторым входом исполнительного механизма (место включения коьвенсирующего сигнала определяется конструк 15 тивными особенностями выполненияконтура Формирования компенсирующегосигнала Г 21, (31 и 4,Наиболее близкой по техническойсущности к изобретению является сис 20 тема регулирования, содержащая последовательно соединенные регулятор иисполнительный механизм, выход которого соединен со входом объекта регу-,лирования,и через последовательные25 соединенные датчик сигнала управления и моделирующее устройство - спервым входом устройства сравнения,выход объекта регулирования соединенс одним из входов регулятора и черездатчик регулируемой координаты -со вторым входом устройства сравнения,выход которого через последовательно соединенные фильтр и блок управления соединен со вторым входом исполнительного механизма 5,Однако данная система обладает низкой точностью.Цель изобретения - повьааение точности системы регулирования.Поставленная цель достигается тем, что в систе 1.1 е выход датчика регулируемой координаты соединен со вторым входом моделирующего устройства.динамика системы описывается урав- нением где Х (с) - вектор фазовых координат объектива;О - вектор управляющихвоздействий;Ф- заданная функция, харак-.,теризующая динамические свойства объекта;Е(с)" вектор возмущающих сил.При переходе во временную область ранение уравнения (1) может быть эаписано в виде уравнения параметров состояния 25 Х и+)Т: А тХ(т)+ ВЩ О(пт)+ СЩ Е(пт), (2) З 0 Ьт 1 д О(пт): - Ц(и+1)Т, ( 3)где ЩЬ+1)т-С(тр(птЦ:ЦЛ 91-1)Т 3";Я(п+1) т, . ", л(нТЦ; дО(пТ) - корректирующее управлякщее воздействие.С учетом (3) уравнение (2) записывается в видеХ(п+ )ТД:АТДХ(пт)+ВЩ(О,(пт)+дО(пт+, 60(4)где ОпТ) управляющее воздействие,выработанное регулятором для промежутка времейи ГпТ 3,1,(п+1) Т 1, 65 в правой части которого первая компо-. нента характеризует собственное движение объекта, вторая - эффект действия управлеия, а третья - эффект действия возмущения на промежутке времени п Т,( п+ ) т,Компонента С ГТ Е (пт) является случайной величиной, полная компенсация которой невозможна. Однако. воз можно построение систеыю, в которой эа счет изменения эффекта действия управления осуществляется компенсация некоторой оценки возмущения7 с(п+1) Т 1, полУченной в результате 45 ее прогнозирования по оценкам, вычисленным на предыдущих К щагах измерения Х(п -1) Т ( О, 1 2.,К), т.е.обеспечивается выполнение условия Ц(п+1)Т - сигнал возмущения в .момент (и+1)Т.На чертеже представлена блок-схема УСтройства.Система содержит регулятор 1, исполнительный механизм 2, блок 3 управ-. ления, датчик 4 сигнала управления, датчик 5 регулируемой координаты, первый и второй блоки 6 и 7 прогнозирования, устройство 8 сдвига, блок 9 задержки, устройство 10 сравнения, Фильтр 11, моделирующее устройство 12, объект 13 регулирования, Х 8 входной сигналр 00 выходной сиг нал регулятора, О - сйгнал управленияу Хаюх- регулируемая координата 2 - сигнал возмущения, ЬО - компенсирующий сигнал.Устройство работает следукщим образом.Основной контур управления, сос" тоящий из регулятора 1, .исполнительного механизма 2 и объекта 13 регулирования, предназначен для ликвидации основных рассогласований между заданным ХЭ и текущим Х щзначениями регулируемой координаты, К основному сигналу управления Оп на входе исполнительного механизма добавляется компенсирующий сигнал дО(пт), являющийся постоянным на интервалепТсс(п+1)Т, где Т - период дискретности, и формируеьый контуром компенсаций, в состав которого входят блоки 3"12.В конце и-го периода через датчики 4 и 5 информация о величине управлякщего сигнала О и регулируемой координате Хйы в виде дискретных значений О(пТ) и Х(пТ) принимается и фиксируется в моделирующем устройстве 13, где по алгоритму 11 рп+ )Т 1 ф ЯГТ Х(п 1 )+ Ь(Т) О(п Т)определяется оценка регулируемойкоординаты для конца (пФ 1)-го периода. В устройстве 7 сдвига эта оценка задерживается по времени на одинпериод. В момент времени с пТ с выхода устройства 7 сдвига вычисленнаяпри с,(п)Т оценка Х (пТ) сравнивается с текущим значением параметра Х(пТ) в устройстве 10 сравнения,в результате чего определяетсяоценка сигнала возмущения Х(пТ) зап-й период, т.е. оценка слагаемогоС(ТЗЕ(пт) иэ (2),По величине А(пт) и К предыду"щих оценок Щп)Т, 1 щ 1,2,К,хранящихся в устройстве 7 задержки,прогнозируется оценка сигнала возмущения 1(п+1)Т за (и+1)-й периоддискретности по определенному алгоритму экстраполяции, В блоке 3 управления по выходному сигналу Фильтра 11определяется и Фиксируется на проме-,кутке (пТ), (п+1)Т корректирующийсигнал ь О (п Т) .830294 2(1 Формула изобретения 2. Авторское Р 263016,кл, 63. Авторское Р 269251, кл. 64, Авторское Р 559220, кл. 65. Авторское Р 607181, кл. С (прототип) . свидетельство СССР21 С 46/50, 1968,свидетельство СССР05 В 17/00, 1968.свидетельство СССР05 В 11/01, 1975.свидетельство СССР05 В 11/06, 1975 ваКорректор О Билак Составитель Г, Не ехред М,Табакови 1.Погориля едакт Подпискомитета СССР,и открытийаушская наб., д. Заказ 3306 атен илиал ПП Таким образом, с помощью контура компенсации блоков (3-12) частично, компенсируется влияние сигнала возмущения на каждом интервале дискретности, чем в значительной степени (на рабочих частотах летательного аппарата в 10-50 раз) снижается уровень установившихся ошибок регулируемой координаты. Элементы основного контура 1 и 2 стабилизации могут быть выполнены как в непрерывном, так и в дискретном вариантах.Устройство контура компенсации работают дискретно, причем математические и логические операции, выпслняемюе ими, могут реализоватьсятакже элементами непрерывного нли 15 цискретного действия. Система регулирования, содержащая последовательно .соединенные регулятор и исполнительный механизм, выход 25 которого соединен со входом объекта регулирования, и через последовательно соединенные датчик сигнала управления и моделирующее устройстТираж, 940 НИИПИ Государственног по делам изобрЕтен 113035, Москва, Ж, во - с первым входом устройствасравнения, выход объекта регулирования соединен с одним из входоврегулятора и через датчик регулируемой координаты - со вторым входом устройства сравнения, выход которого через последовательно соединенные фильтр и блок управлениясоединен со вторым входом исполнительного механизма, о т л и ч а ющ а я с я тем, что, с целью повышения точности систеьи, в ней выход датчика регулируемой координаты соединен со вторым входом моделирующего устройства,Источники инФормации,принятые во внимание при экспертизе1. Суевалов Л.Ф. Самонастраи.вающиеся системы в судовой автоматике, Л., "Судостроение", 1966,с. 75-78, р. 76. жгорсд, ул. Проектна
СмотретьЗаявка
2808020, 07.08.1979
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙИНСТИТУТ ИМ. A. Ф. МОЖАЙСКОГО
МАЙБОРОДА ЛЕОНИД АЛЕКСАНДРОВИЧ, ЯНКОВСКИЙ ВИТАЛИЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки:
Опубликовано: 15.05.1981
Код ссылки
<a href="https://patents.su/3-830294-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Устройство служебной связи

Номер патента: 1757127
Опубликовано: 23.08.1992
МПК: H04Q 7/00
...вход блока 17-1 сигнализации, интретьим входом соответствующего блока 17 формируя оператора"о приеме его запооса сигнализации, четвертый вход которого со на соединение, и на-второй вход элемента И единен с соответству 1 ощим четвертым вхо. Сигнал "0", поступающий после срабатыдом блока 1 автоматического соедийения и: вайия триггера 5-1 с его первого выхода на отбоя, четвертый выход которого соединен . третий вход элемента И 10-1, запрещает с вторым входом блока 2 селекции, а выходприехал повторного вызова оператора с соотпервого элемента ИЛИ 11 соединен,с вхо ветствующего переговорйого устройствадом первого счетчика 13, выход которого: Аналогичным образом происходит присоединен с вторыми входами всех блоков 21 ем запроса на.соединение с...
Устройство для соединения плавающего объекта с грузоподъемным механизмом

Номер патента: 1504155
Опубликовано: 30.08.1989
Автор: Сгибнев
МПК: B63B 22/00
Метки: грузоподъемным, механизмом, объекта, плавающего, соединения
...5.Устройство работает следующимобразом,Перед подъемом объекта предварительно на борт судна подают конец 45направляющего троса 3, в которомсоздается натяжение, после чего понему пускают автоматический захват.Шток 1 под действием силы натяженияперемещается по гибкой тяге петли,устанавливаясь вдоль направляющеготроса 3. Если направление троса 3лежит не в плоскости расположениягрузовой петли, то шток 1, повора 5 4чиваясь в осях шарнира 6, отклоняется в сторону действия силы натяжения, преодолевая упругость гибкой тяги 9, Натяжение в тросе 3 поддерживается в продолжение всей операции спуска-подъема. При этом захват штока 1 и его отсоединение от автоматического захвата спуско-подъемного устройства осуществляются известным способом. После...
Устройство для соединения входа сборной головки с выходом устья скважины

Номер патента: 1329625
Опубликовано: 07.08.1987
МПК: E21B 33/035
Метки: входа, выходом, головки, сборной, скважины, соединения, устья
...оборудован четырьмявходами-пазами, размещенными противоположно и образованными наклоннымиповерхностями 23. Наклонные поверхности каждого паза образуют сбоку плоскости 24 приближения, затем направляющие плоскости 25, которые сужаяпаз, расположены так, чтобы обеспечить совмещение в вертикальнойплоскости оси большого верхнего ролика 20 и оси малого нижнего ролика 2521, когда этот последний находит опору в нижней части паза, образованногонаклонными поверхностями.В соединительном модуле смонтирован механизм направления соединителя5. Этот механизм содержит вилку 26,в ветвях которой выполнены поверхности 27 скольжения, служащие для прямолинейного направления прижимных роликов 22. В продолжении вилки 26 находится рычаг 28, жестко связанный...
Предыдущий патент: Система управления электроприводомпромышленного робота
Следующий патент: Система управления для объектовс запаздыванием
Случайный патент: Кинематическая зубчатая передача