Способ формирования сигналазадания для систем стабилизацииобектов c запаздыванием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 819791
Авторы: Аронзон, Возианова, Левин, Митропольский, Цукерман
Текст
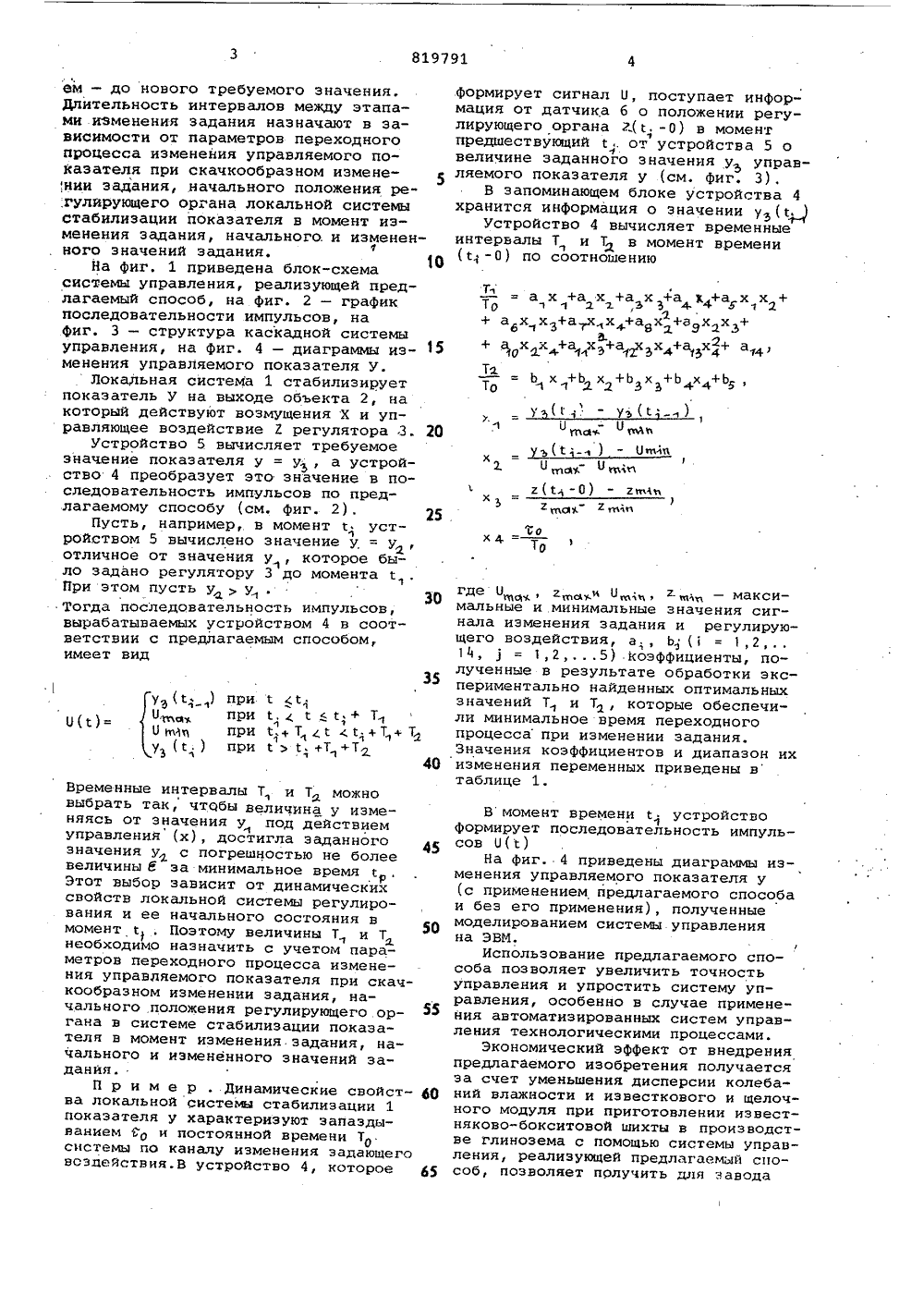
Союз Советских Социаеистических Республик(22) Заявлено 2734.7 б (21) 2354587/18-24с присоединением заявки Йо(51)М. Кл. 6 05 В 11/00 Госудйрственный комитет СССР яо делам изобретений и открытий(088.8) Дата опубликования описания 100481 В.Л. Аронзон, Л.В. Вознаноаа, М.В. Левиг 4,А.Н. Митропольский и И.Х. Цукерман(72) Авторы изобретени сесоюэный научно-исследовательский и проектный институт алюминиевой, магниевой и электродной промышленности) Заявите СИРНАЛА ЗАДАНИЯ И ОБЪЕКТОВ С ЗАП СПОСОБ ФОРМИРОВАНДЛЯ СИСТЕМ СТАБИЛИЗ АНИЕ ьным образом отрабатыобразные сигналы измебам ор сис зды- для кой от" кает Известны способы управления технологическим процессом с помощью каскадной системы управления, включающей стабилизацию показателей, характеризующих технологический режим (например, концентрацию компонентов в веществе на выходе агрегата, температуры материала в реакционной зоне и др.) и изменение заданий на стабилизацию этих показателей 113.Каскадным системам свойственна намическая ошибка отработки сигнав изменения задания. Эта ошибка ъясняется различными свойствами локальной системы. стабилизации по .каналам нагрузки и изменения задания. Параметры настройки системы, наилучшим образом подавляющей нежелательное влияние колебаний нагрузки, не совпадают с параметрами настройки сисДостигается это тем, что формируют первый сигнал временного интервала, в течение которого изменяют сигнал задания до первого предельногозначения в сторону нового значениясигнала задания, формируют второйсигнал временного интервала, в те чение которого изменяют сигнал задания до второго предельного значения,а затеМ сигнал задания изменяют доего нового значения.Задание на стабилизацию каждогопоказателя, характеризующего технологический режим, изменяют в три этапа. На первом этапе - до предельногозначения в сторону нового задания,на втором - до предельного значенияв противоположную сторону, на третьди ло об Изобретение относится к спос ф мирования сигнала задания дл тем стабилизации объектов с зап ванием и может быть использован управления технологическими про сами в металлургической, химиче и других, сходных по технологии раслях промышленности, где возн необходимость оптимизации произства. темы, опт ималвающей скачконения задания.Наиболее близким к изобретению техническим решением является способ формирования сигнала задания для систем стабилизации объектов с запаздыванием, основанный на формировании сигналов с запаздыванием 2.Цель изобретения - повьыение точ. ности способа по сигналу стабилиза-ции.819791 формирует сигнал О, поступает информация от датчика б о положении регулирующего органа 3(с, -0) в момент предшествующий с . от устройства 5 о величине заданного значения у управляемого показателя у (см. Фиг. 3).В запоминающем блоке устройства 4 хранится информация о значении уэ(с. )Устройство 4 вычисляет временйые интервалы Т и Т в момент времени (с -0) по соотношению чуэ ( е) Оъе О ч у (с,) О(с)= Временные интервалы Т и Т можно выбрать так, чтобы величина у изменяясь от значения у под действием управления (х), достигла заданного значения уг с погрешностью не более величины Я за минимальное время Этот выбор зависит от динамическихРсвойств локальной системы регулирования и ее начального состояния в момент с . Поэтому величины Т и Т1 необходимо назначить с учетом параметров переходного процесса изменения управляемого показателя при скачкообразном изменении задания, начального положения регулирующего.органа в системе стабилизации показателя в момент изменения задания, начального и измененного значений заданияП р и м е р . Динамические свойст ва локальной системы стабилизации 1 показателя у характеризуют запаздыванием Ср и постоянной времени Т0 системы по каналу изменения задающего воздействия.В устройство 4, которое 65 ем - до нового требуемого значения. Длительность интервалов между этапами изменения задания назначают в зависимости от параметров переходного процесса изменения управляемого показателя при скачкообразном изменении задания, начального положения регулирующего органа локальной системы стабилизации показателя в момент изменения задания, начального.и измененного значений задания.На фиг. 1 приведена блок-схема системы управления, реализующей предлагаемый способ, на Фиг. 2 - график последовательности импульсов, на фиг. 3 - структура каскадной системы управления, на фиг. 4 - диаграммы из менения управляемого показателя у.Локадьная система 1 стабилизирует показатель У на выходе объекта 2, на который действуют возмущения Х и управляющее воздействие Е регулятора 3. 20Устройство 5 вычисляет требуемое значение показателя у = у , а устройство 4 преобразует это значение в последовательность импульсов по предлагаемому способу (см. Фиг. 2). 25Пусть, например, в момент с устройством 5 вычислено значение у = у, отличное от значения у , которое было задано регулятору 3 до момента с При этом пусть уУч . 30 Тогда последовательность импульсов, вырабатываемых устройством 4 в соответствии с предлагаемым способом, имеет вид при с (спри с, сс+ Тпри с,+ Тг сс.+Т+ Тпри С С,+Т +Т 240- а х +а х +а х +а х +а х х +ТчТ р 1 ч 2 2.,З 3 4. 4 5 1 22+ бх х +ах +ах х,+а х + а+,Та- = Ь и +Ь 2 х +ЬЗХ +ЬФхд+ЬуТр где Ощ,х, ги О,;, г. - максимальные и минимальные значения сигнала изменения задания и регулирующего воздействия, а Ь ( = 1,2,.14, ) = 1,2,5) коэффициенты, полученные в результате обработки экспериментально найденных оптимальныхзначений Т и Т, которые обеспечили минимальное время переходногопроцессапри изменении задания.Значения коэффициентов и диапазон ихизменения переменных приведены втаблице 1Вмомент времени с устройство Формирует последовательность импульсов О(с)На Фиг. 4 приведены диаграммы изменения управляемого показателя у (с применением предлагаемого способа и без его применения), полученные моделированием системы управления на ЭВМ.Использование предлагаемого способа позволяет увеличить точность управления и упростить систему управления, особенно в случае применения автоматизированных систем управления технологическими процессами.Экономический эффект от внедрения предлагаемого изобретения получается за счет уменьшения дисперсии колебаний влажности и известкового и щелочного модуля при приготовлении известняково-бокситовой шихты в производстве глинозема с помощью системы управления, реализующей предлагаемый способ, позволяет получить для завода"Па ул. Проек Уж средней модности экономический эффектв размере 700 тыс. руб. Формула изобретения Способ формирования сигнала задания для систем стабилизации объектов с запаздыванием, основанный на формировании сигнала стабилизации, о т,л и ч а ю щ и й с я тем, что, с целью увеличения точности способа по сигналу стабилизации формируют первый сигнал временного интервала в течение которого изменяют сигнал задания до первого предельного значения в сторону нового значения сигнала задания, формируют второй сигналвременного интервала, в течение которого изменяют сигнал задания довторого предельного значения, а затем сигнал задания изменяют до его,нового значения.Источники информации,принятые во внимание при экспертизе1Авторское свидетельство СССРР 474523, кл. С 05 В 13/00, 1974.
СмотретьЗаявка
2354587, 27.04.1976
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙИ ПРОЕКТНЫЙ ИНСТИТУТ АЛЮМИНИЕВОЙ, МАГ-НИЕВОЙ И ЭЛЕКТРОДНОЙ ПРОМЫШЛЕННОСТИ
АРОНЗОН ВИТАЛИЙ ЛЬВОВИЧ, ВОЗИАНОВА ЛЮДМИЛА ВЛАДИМИРОВНА, ЛЕВИН МИХАИЛ ВЕНИАМИНОВИЧ, МИТРОПОЛЬСКИЙ АРКАДИЙ НИКОЛАЕВИЧ, ЦУКЕРМАН ИСААК ХАИМОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: запаздыванием, сигналазадания, систем, стабилизацииобектов, формирования
Опубликовано: 07.04.1981
Код ссылки
<a href="https://patents.su/3-819791-sposob-formirovaniya-signalazadaniya-dlya-sistem-stabilizaciiobektov-c-zapazdyvaniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования сигналазадания для систем стабилизацииобектов c запаздыванием</a>
Устройство для получения заданных значений постоянного тока

Номер патента: 1328801
Опубликовано: 07.08.1987
Авторы: Блинов, Кулешов, Шилов, Шифрин
МПК: G05F 1/46
Метки: заданных, значений, постоянного
...Реально на выходе усилителя 11 имеется остаточное напряжение, обусловленное статической ошибкой системы 50 автоподстройки. Для исключения влияния статической ошибки следящей системы на точность воспроизведения и стабилизации тока это напряжение необходимо учитывать. Причем, если остаточное напряжение на выходе узкополосного усилителя 11, обусловленное изменением тока в катушках 2 и 3 и, следовательно, изменением В, имеет ту же фазу, что И напряжение на выходе узкополосного усилителя 12, то при изменении значения В фазы этих напряжений сдвинуты на 180 о. Поэтому в суммирующем усилителе 16 сигналы, обусловленные изменением В, складываются, а сигналы, связанные с изменением В , вычитаются.иВ синхронном детекторе 14 из суммарного...
Сигнализатор заданного значения частоты
Номер патента: 1057939
Опубликовано: 30.11.1983
Автор: Заморин
МПК: G06F 7/04
Метки: заданного, значения, сигнализатор, частоты
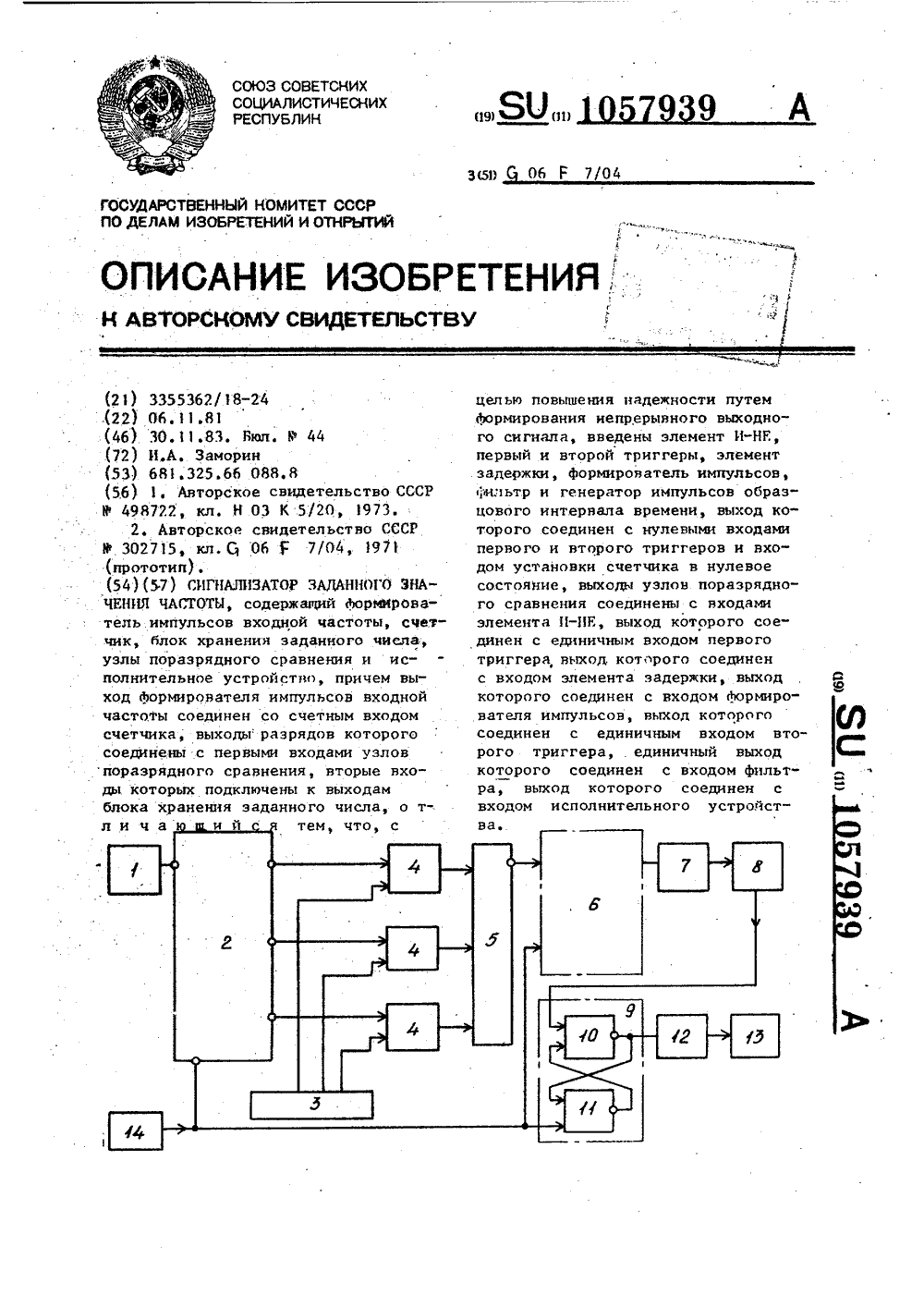
...выходного сигнала, если частота входного сигнала достигла заданного значения,Поставленная цель достигается тем, что в сигнализатор заданного значения частоты, содержащий Аормирователь импульсов входной частоты, счетчик, блок хранения заданного числа, узлы поразрядного сравнения и исполнительное устройство, причем выход Аормирователя импульсов входной частоты соединен со счетным входом счетчика выходы разрядов которого соединены с первыми входами узлов поразрядного сравнения, вторые вхо" ды которых подключены к выходам блока хранения заданного числа, введены элемент И-НЕ, первый и второй триггеры элемент задержки, формирователь импульсов, Фильтр и генератор импульсов образцового интервала времени, выход которого соединен с нулевыми...
Устройство стабилизации амплитуды гармонического сигнала

Номер патента: 1197056
Опубликовано: 07.12.1985
Автор: Ярухин
МПК: H03G 3/20
Метки: амплитуды, гармонического, сигнала, стабилизации
...элементе НЕ 4, поступает на управляю 1 1197056Изобретение относится к радиотехнике и радиоэлектронике и может бытьиспользовано для стабилизации амплитуды гармонического сигнала в синтезаторах частот, измерительныхприборах и системах автоматики,Цель изобретения - уменьшениеискажений стабилиэируемого сигнала.,На фиг,1 представлена структурнаяэлектрическая, схема устройства стабилизации амплитуды гармонического сигнала; на фиг.2 ( а,б,в,г,д.е,ж,з,и эпюры напряжений, поясняющие работуустройства стабилизации амплитуды:гармонического сигнала. 15Устройство стабилизации амплиту"ды гармонического сигнала содержитпервый управляемый аттенюатор 1, второй управляемый аттенюатор 2, реверсивный счетчик 3, второй элемент 2 рНЕ 4, первый коммутатор 5,...
Способ формирования периодического сигнала с заданным значением коэффициента гармоник

Номер патента: 1241145
Опубликовано: 30.06.1986
Авторы: Бухалов, Голубенко, Ковальчук, Костюк
МПК: G01R 23/20
Метки: гармоник, заданным, значением, коэффициента, периодического, сигнала, формирования
...а вторымвходом соединенный с выходом источника 1 синусоидального сигнала и пер 1вым входом блока 7 сравнения по среднеквадратическому значению, второйвход которого соединен с выходоммасштабного преобразователя 4, причемуправляющий вход масштабного преобра- зователя 4 через блок 8 управлениясоединен с выходом блока 7 сравненияпо среднеквадратическому значению.Выход сумматора 6 является выходомустройства,Устройство, реализующее предлагаемый способ, работает следующим образом.Источник 1 синусоидального сигналаформирует синусоидальный сигнал пер-вой гармоники с малым значением коэффициента гармоник (менее 0,001 ).Умножитель 2 частоты формирует синусоидальный сигнал второй гармоники,а затем блок 3 .произвольного искажения (например,...
Система автоматического управления и стабилизации параметров траектории летательного аппарата

Номер патента: 479088
Опубликовано: 30.07.1975
Автор: Живетин
МПК: G05D 1/00
Метки: аппарата, летательного, параметров, стабилизации, траектории
...(скоростной напор) на выходе блока 1 25 соответствует моменту т. При этом М=т - тсоответствует запаздыванию канала, С целью исключения вредного влияния М в систему включен один из блоков экстраполяции 9, 9, 9" в зависимости от свойств входного сигназо ла.479088 4Р, который измеряется с помОщью датчика тангажа 2. На выходе сумматора 3 получают угол наклона вектора скорости О. Полученные значения угла атаки а, скоростного напора д, тангажа К, угла наклона вектора скорости О подаются в блок формирования сигналов управления 4, где из полученных сигналов формируется сигнал управления, который с помощью силовых приводов отклоняет не 1 о обходимые органы управления, напримерруль высоты, элероны - закрылки, тормозные щитки, рукоятку...
Предыдущий патент: Интерполяционный измеритель вре-менных интервалов
Следующий патент: Система циклового программногоуправления
Случайный патент: Устройство для приема сигналов с фазочастотной модуляцией