Система автоматического управления и стабилизации параметров траектории летательного аппарата
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 479088
Автор: Живетин

Текст
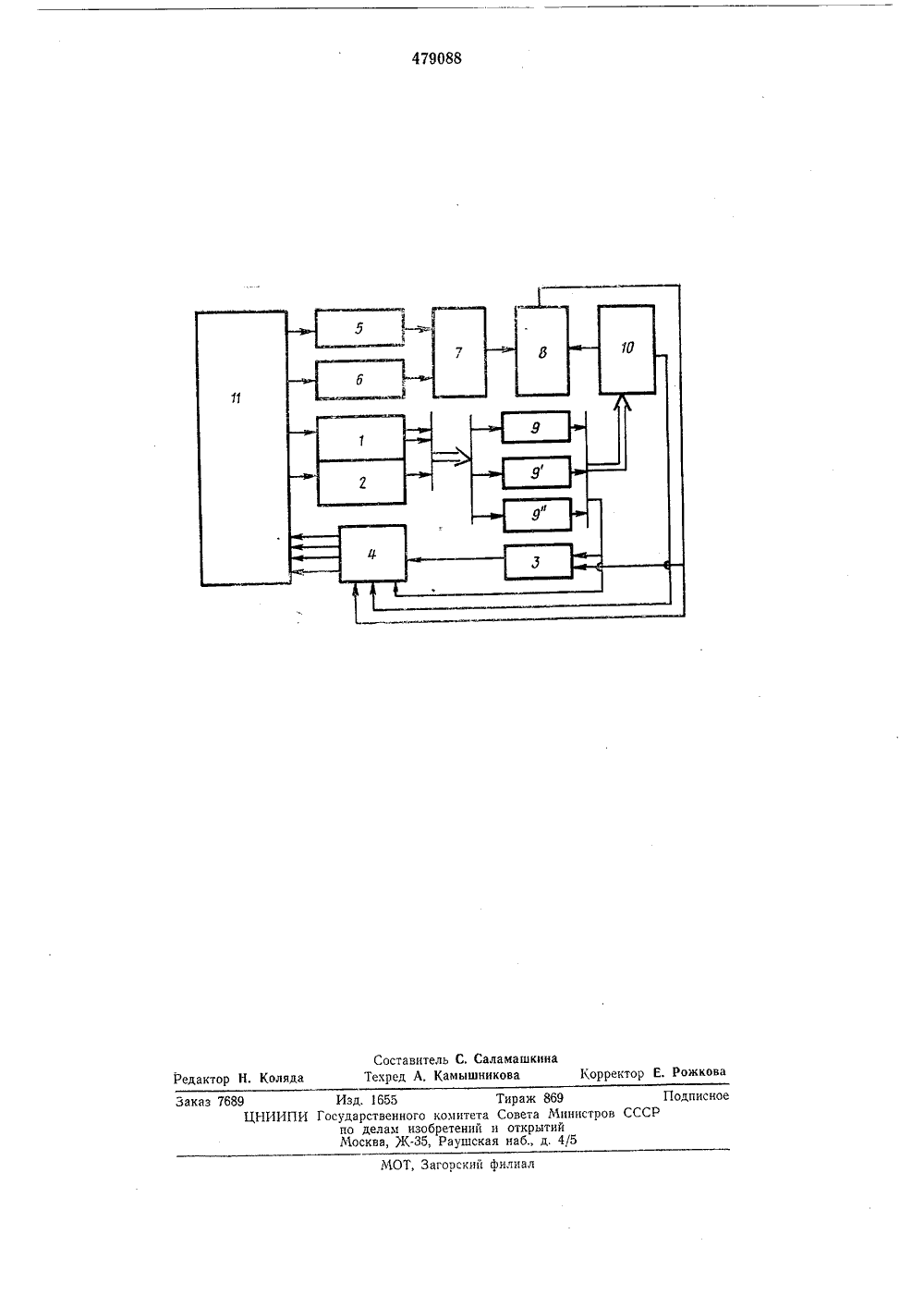
ИАТЕг 1 Т 0ь,: б лмоз, .,СПИИЗОБРЕТЕН ИЯц 479088 Союз Советских Социалистических Республик(51) М. Кл, 6 050 1/00 Государственный комитет Совета Министров СССР па делам изобретений и открытий(71) Заявитель В, Б. Живетин Казанский ордена Трудового Красного Знамени авиационный институт(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПАРАМЕТРОВ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА1Предлагаемая система относится к области авиастроения и может быть применена для автоматического управления и определения истинных значений параметров траектории летательного аппарата,Известна система автоматического определения параметров траектории летательного аппарата, содержащая датчики скорости высоты и тангажа, последовательно соединенные сумматор и блок формирования сигналов управления, выходы которого подсоединены к объекту, который подключен ко входам датчиков,Предлагаемая система автоматического управления и стабилизации параметров траектории летательного аппарата отличается тем, что содержит датчики давления и последовательно соединенные сумматор и усилитель, блоки экстрополяции и блок формирования скоростного напора, выходы которого подключены ко второму входу усилителя и входу формирования сигнала управления, два других входа которого подключены соответственно к выходам усилителя, блоков экстраполяции и второму входу сумматора, а выходы датчиков давления подсоединены ко входам дополнительно установленного сумматора. Это позволяет повысить точность управления и расширить прпменение системы. 2На чертеже изображена блок-схема системы.Система состоит из датчика 1 скорости ивысоты, датчика 2 тангажа, сумматора 3, блоб ка формирования сигналов управления 4, спаренных датчиков давления 5 и 6, дополнительно установленного сумматора 7, усилителя 8, блоков экстраполяции 9 - 9", блока 10 формирования скоростного напора и объек та 11.Работа предлагаемой системы автоматического управления и стабилизации основана на законах аэродинамики, динамики полета и теории автоматического управления. С помо щью датчиков давления 5, 6, чувствительнаячасть которых, мембрана, составляет часть аэродинамической поверхности, замеряют избыточные давления, алгебраическая сумма которых, выделяемая с помощью сумматора 7 пропорциональна произведению скоростного напора на угол атаки. При этом, если на выходе сумматора 7 сигнал соответствует значениям параметров в момент времени , то скорость (скоростной напор) на выходе блока 1 25 соответствует моменту т. При этом М=т - тсоответствует запаздыванию канала, С целью исключения вредного влияния М в систему включен один из блоков экстраполяции 9, 9, 9" в зависимости от свойств входного сигназо ла.479088 4Р, который измеряется с помОщью датчика тангажа 2. На выходе сумматора 3 получают угол наклона вектора скорости О. Полученные значения угла атаки а, скоростного напора д, тангажа К, угла наклона вектора скорости О подаются в блок формирования сигналов управления 4, где из полученных сигналов формируется сигнал управления, который с помощью силовых приводов отклоняет не 1 о обходимые органы управления, напримерруль высоты, элероны - закрылки, тормозные щитки, рукоятку двигателя, с целью компенсации отклонения параметров от заданных значений.15 сть: 5х(1) =х(т+М) =х(т)+ Ы+ +д 1 д ц уд и3Если функции параметров от времени аналитические, то применяется блок экстраполяции сигнала 9, в основу работы которого положена известная математическая зависи- мо где х(т) - параметр на входе блока 1;Ж - запаздывание системы.В случае, когда производные х(т) не существуют или терпят разрыв, применяют блок экстраполяции 9", в основу работы которого положена известная математическая зависимость: Предмет изобретениях(1) =Ф(1, т)х(т),где Ф(1, т) - фундаментальная матрица Коши решения дифференциального уравнения для данного параметра;х(1) - выходной сигнал блока 9";х(т) - выходной сигнал блока 1.В случае, когда фазовые координаты измеряются с запаздыванием и со случайными помехами в системе применяется блок 9 - оптимальной фильтрации (фильтр Калмана) и предсказания, включающий как часть блок 9,Вычисленные таким образом параметры - скорость и плотность - подаются в блок 10, где формируется сигнал, пропорциональный скоростному напору, выход которого соединен со входом усилителя (делителя) 8, на выходе которого получают истинный (воздушный) угол атаки, В сумматоре 3 определяется алгебраическая сумма угла атаки а и тангажа Система автоматического управления и 20 стабилизации параметров траектории летательного аппарата, содержащая датчики скорости, высоты, тангажа, последовательно соединенные сумматор и блок формирования сигнала управления, выходы которого подсоеди иены к объекту, который подключен ко входам датчиков, отличающаяся тем, что, с целью повышения точности работы и расширения области применения системы, в нее введены датчики давления и последовательно соединенные сумматор и усилитель, блоки экстраполяции и блок формирования скоростного напора, выходы которого подключены ко второму входу усилителя и входу блока формирования сигнала управления, два других входа которого подключены соответственно к выходам усилителя, блоков экстраполяции и второму входу сумматора, а выходы датчиков давления подсоединены ко входам дополнительно установленного сумматора.479088 Составитель С, СаламашкинаТехред А, Камышникова Корректор Е. Рожкова Редактор Н, Коляда МОТ, Загорский Филиал Заказ 7689 Изд. 1655 Тираж 869 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж, Раушская наб., д, 4/5
СмотретьЗаявка
1711353, 03.11.1971
КАЗАНСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ АВИАЦИОННЫЙ ИНСТИТУТ
ЖИВЕТИН ВЛАДИМИР БОРИСОВИЧ
МПК / Метки
МПК: G05D 1/00
Метки: аппарата, летательного, параметров, стабилизации, траектории
Опубликовано: 30.07.1975
Код ссылки
<a href="https://patents.su/3-479088-sistema-avtomaticheskogo-upravleniya-i-stabilizacii-parametrov-traektorii-letatelnogo-apparata.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления и стабилизации параметров траектории летательного аппарата</a>
Система регулирования давления воздуха летательного аппарата с двумя автономными гермокабинами

Номер патента: 1127204
Опубликовано: 27.05.2006
Авторы: Ефимов, Зазнобин, Колесников, Мишина, Хаврошин
МПК: B64D 13/04
Метки: автономными, аппарата, воздуха, гермокабинами, давления, двумя, летательного
Система регулирования давления воздуха летательного аппарата с двумя автономными гермокабинами, содержащая в каждой гермокабине основной регулятор давления, входы которого соединены с задатчиком давления, с датчиками атмосферного и кабинного давлений и с датчиком скорости изменения давления, а выход - с первым входом сумматора, выключатель тактической разгерметизации, сигнализатор предельного давления, основной и резервный исполнительные механизмы, выпускное устройство с датчиком положения и с сигнализатором крайнего положения, общие для гермокабин блок аварийной разгерметизации, резервный регулятор давления, входы которого соединены с резервным задатчиком давления, с датчиками...
Устройство для определения параметров давления крови

Номер патента: 1213486
Опубликовано: 23.02.1986
Авторы: Анхимюк, Дорошкин, Куликов, Новиков, Шинов
МПК: A61B 5/02, G06F 19/00
Метки: давления, крови, параметров
...первой и второй производных поступают в блоки 22 и 23 выделения максимальной амплитуды для формирования сигнала управления индикацией величин давления крови.Блоки 22 и 23 выделения максимальной амплитуды работают следующим образом. При формировании сигнала 4 О отсчета максимального давления крови сигнал второй компоненты положительной составляющей второй производной поступает на первый вход компаратора 49 блока 23 ( фиг.3) . Счетчик 47 обнулен блоком 34 перед началом поиска значений параметров давления крови, в результате чего на выходе цифроаналогового преобразователя 48 и на втором входе ком- О паратора 49 уровень сигнала равен нулю, что является условием полно-, го прохождения сигнала поступающего с информационного входа блока...
Устройство для измерения статического давления на летательных аппаратах

Номер патента: 1400248
Опубликовано: 27.05.2005
МПК: G01L 19/00
Метки: аппаратах, давления, летательных, статического
1. Устройство для измерения статического давления на летательных аппаратах, содержащее цилиндрический насадок с полусферической приемной частью, в центре и на боковой поверхности которой размещены основное и два дополнительных приемных отверстия, которые соединены пневмоканалами с преобразователями давления, причем дополнительные приемные отверстия размещены на поверхности приемной части под равными углами к оси симметрии приемника в двух взаимно перпендикулярных плоскостях, и преобразователи углов атаки и скольжения, отличающееся тем, что, с целью повышения точности измерения в диапазоне больших высот, в него введены сумматор, блок масштабирования, перемножитель, делитель и...
Система регулирования давления на летательном аппарате

Номер патента: 524356
Опубликовано: 27.12.2005
Авторы: Воронин, Ефимов, Зазнобин, Колесников, Лесников, Медведев, Прахов
МПК: B64D 13/04
Метки: аппарате, давления, летательном
Система регулирования давления на летательном аппарате, содержащая исполнительный клапан с рабочей камерой, подключенной к гермокабине и вакуумнасосу через электропневмопреобразователь сигнала сумматора, связанного с задатчиком и датчиком абсолютного и избыточного кабинного давления и скорости его изменения, отличающаяся тем, что, с целью автоматизации работы, вакуумнасос имеет в электроцепи управления контакты реле порогового избыточного давления и соединен с преобразователем через пневмореле, дополнительный вход которого сообщен с атмосферой.
Система регулирования давления на летательном аппарате

Номер патента: 585663
Опубликовано: 20.05.2005
Автор: Баландин
МПК: B64D 13/04
Метки: аппарате, давления, летательном
Система регулирования давления на летательном аппарате, содержащая выпускные клапаны, установленные в двух смежных гермоотсеках, и линии управления, которыми рабочие камеры этих клапанов соединены с соответствующими задатчиками командного давления, отличающаяся тем, что, с целью предотвращения разрушения стенки между отсеками при аварийной разгерметизации одного из них, линия управления выпускным клапаном защищаемого гермоотсека на участке, соединенном с выходом задатчика командного давления, сообщена с выходной полостью задатчика избыточного давления, в котором полость опорного давления сообщена с аварийно разгерметизируемым гермоотсеком.
Предыдущий патент: Устройство для управления подъемно-транспортным механизмом
Следующий патент: Регулятор расхода жидкости
Случайный патент: 179489