Способ управления траспортнымсредством c линейным асинхроннымдвигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 818928
Авторы: Кокин, Попович, Пыжов, Разумовский



Текст
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ п 11 8 8928 Союз Советских Соииалистических Республик(51) М. Кл.зВ 60. 13/00 с присоединением заявки-23) Приоритет43) Опубликовано 07,04,81, Бюллет Государстееииьй комитет СССР(45) Дата опубликования описания 07.04.8(54) СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЛИНЕЙНЪМ АСИНХРОННЫМ ДВИГАТЕЛЕМамики скорость ределяются выгаетстг тем, что формируют корий сигнал по напряжению, опрегральное значение питающего 1 (у тд й,Изобретение относится к управлению транстюртными средствами с линейными двигателями и предназначено для управления перестановочными платформами с линейными асинхронными двигателями в ком плексах обмена вагонеток шахтных подъемников.Известен способ управления разгоном и торможением транспортного средства с линейным асинхронным двигателем, преиму О щественно перестановочной платформой в комплексе обмена ватонеток шахтных подьемников, основанный на задании времени работы двигателя при разгоне и торможении в зависимости от перемещаемой массы 15 и корректирующего сигнала, пропорционального величине питающего напряжения 1;Однако при применении этого способа транспортное средство останавливается, не дойдя до: заданной точки остановки; т; е. необходимо дополнительное включение электропривода для дотяжки транспортного средства до остановки.Цель изобретения - повышение надежности путем увеличения точности регулирования.Это достиректирующделяя инте 30 напряжения в период разгона, в момент окончания разгона запоминают интегральное значение питающего напряжения за время разгона, затем определяют его интегральное значение при торможении и сравнивают его с запомненным значением этого напряжения за время разгона.На фиг. 1 показан график движения перестановочной платформы (ПП) в координатах ее скорости У и проходимого пути Ь; на фиг. 2 - структурная схема устройства, реализующего предлагаемый способ.Реализация предлагаемого способа для ПП, перемещаемой линейным асинхронным двигателем (ЛАД), работающим со скольжением, близким к единице, при двухпериодной диаграмме скорости осуществляется следующим образом,Тяговое усилие ЛАД в зоне рабочих скольжений пропорционально квадрату питающего напряжения, а усилие сопротивления перемещению ПП пропорционально перемещаемой массе.Из основного закона дини путь, проходимый ПП, опражениямио о- К 7," - К и.),77,771 где т - перемещаемая масса;К - коэффициент пропорциональностимежду тяговым усилием ЛАД и квадратом питающего напряжения;с 7 - напряжение подведенное к обмотке индуктора;К - коэффициент сопротивления движению;7 о - ускорение свободного иадсш 55.Время 17 разгона ПП определяют пересечением кривой 1 действительной характеристики разгона с кривой 2, характеризующей режим торможения ири минимальном напряжении питания. Это время может быть выражено через интегральное значение питающего напряжения в период пуска777 Ки - К,та 7 77+о ои1 г+ , = тЗ, (3)2 (КУфгш+ Ктд) где 577 - полный путь перемещения ПП;У - минимально возможное напряжение, подведенное к индуктору.Время 1 отключения ЛАД определяют пересечением кривой 3 действительной характеристики торможения с кривои 4, характеризующей свободный выбег. Он может быть выражен через результат сравнсшгя запомненного интегрального значения питающего напряжения за время разгона с интегральным значением питающего напряжения при торможениис,У а ( - Ки - К, а)сг+(г, - ,) Х с,(4) Устройство для реализации предлагаем- го способа содержит логический блок 5, силовую установку б и решающий блок 7.При получении сигнала Пуск, иа выходе логического блока 5 формируется сигнал Разгон, поступающий на первый вход силовой установки б. ПП начинает дьижение. Одновременно сигнал Разгон подается на первый вход решающего блока 7,5 10 15 20 25 30 35 40 45 50 55 00 б 5 иа другис входы которого 7 п 7 даются сигналы полим пути перемещения Ы исрсмсгцасмой массе т и исирс 1 нявио измеряемом значении шпающего наиряжсния с,7.В решающем блоке математически обрабатываются сигналы в соответствии с выражением (3) для корректировки времени разгона. В момент времени 1, при равенствс левой и правой частей выражения (3) на выходе решающего блока 7 формируется сигнал Запрет разгона, поступающий на второй вход логического блока 5, Последний снимает сигнал Разгон и выдает сигнал 1 орможенпс на второй вход силовой установки б и на второй вход блока 7, исреключающегося на рсшеиие выражения (4) для корректировки времени торможения.В момент времени 1 при равенстве левой и правой части выражения (4) на выходе решающего блока формируется сигнал Отключение ЛАД, который поступает в логический блок 5 и далее в силовую установку б. В позиции остановки на выходы логического и решающего блоков поступает сигнал Ориентировка, подготавливающий блоки к повторному действию.Предлагаемый способ управления позволяет отказаться от прямой информации о скорости объекта, уменьшить колебания скорости подхода транспортного средства к позиции остановки и динамические нагрузки иа транспортное средство и фиксирующие устройства, что повышает их надежности и долговечность. Кроме того, способ обеспечивает оптимальный график движения, что повышает производительность транспортного средства и уменьшает потребление электроэнергии линейным двигателем. Формула изобретения Способ управления транспортным средством с линейным асинхронным двигателем, иреимугцественно иерестаиовочной платформой в комплексе обмена вагонеток шахтных подъемников, основанный на задании времени работы двигателя ири разгоне и торможении в зависимости от перемещаемой массы и корректирующего сигнала, пропорционального величине питающего напряжения, отличающийся тем, что, с целью повышения надежности путем увеличения точности регулирования, формируют корректирующий сигнал ио напряжению, определяя интегральное значение пита;.щего нанряжения в период разгона, в момент окончания разгона запоминают интегральное значение питающего напряжения за время разгона, затем определяют его интегральное значение при торможении и сравнивают его с запомненным значением этого напряжения за время разгона.818928 Пус РриеюлироЮко Составитель Л. Резникова Редактор М. Стрельникова Техред И, Заболотнова Корректор Л. ОрловаЗаказ 1023/8 Изд.271 Тираж 749 ПодписноеНПО Поиск Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5 типография, пр. Сапунова, 2 Источники информации,1 ринятые во внимание при экспертизе
СмотретьЗаявка
2685374, 10.11.1978
ПРЕДПРИЯТИЕ ПЯ В-8664, КИЕВСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙИНСТИТУТ ИМ. 50-ЛЕТИЯ ВЕЛИКОЙОКТЯБРЬСКОЙ СОЦИАЛИСТИЧЕСКОЙРЕВОЛЮЦИИ
КОКИН АЛЕКСАНДР ЮРЬЕВИЧ, РАЗУМОВСКИЙ НИКОЛАЙ ГРИГОРЬЕВИЧ, ПОПОВИЧ НИКОЛАЙ ГАВРИЛОВИЧ, ПЫЖОВ ВЛАДИМИР МИХАЙЛОВИЧ
МПК / Метки
МПК: B60L 13/03
Метки: асинхроннымдвигателем, линейным, траспортнымсредством
Опубликовано: 07.04.1981
Код ссылки
<a href="https://patents.su/3-818928-sposob-upravleniya-trasportnymsredstvom-c-linejjnym-asinkhronnymdvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления траспортнымсредством c линейным асинхроннымдвигателем</a>
Преобразователь сигнал-время

Номер патента: 443478
Опубликовано: 15.09.1974
Автор: Одиноков
МПК: H03K 13/20
Метки: сигнал-время
...второго преобразователя 9 частота ц импульсов на выходе дискриминатора 19 уменьшается, При некотором значении разностной частоты 9 срабатывает пороговая схема 20, сигнал на его выходе через блок 4 синхронизации подключает ко входу дискриминатора 19 нижнюю эталонную частоту 1;., запирает третий вентиль 10 и отпирает четвертый вентиль 13. Одновременно в блоке 2 эталонный уровень меняется с У,на УамаксДалее идет подстройка верхнего предела характеристики по интервалу - . Частота автоколебаний кольца, состоящего из блоков 9, 14, 16, 18, 8, 9 уменьшается, что и требует сравнения ее с частотой ,., где- нижняя эталонная частота. Кольцо, состоящее из блоков 9, 14, 16, 18, 8, 9, составлено из дискретных элементов, поэтому если импульс,...
Устройство для определения отклонения фазового сдвига периодического сигнала от номинального значения

Номер патента: 1337807
Опубликовано: 15.09.1987
Авторы: Вороничев, Кербников, Крештал, Менгазетдинов, Розенблат
МПК: G01R 25/00
Метки: значения, номинального, отклонения, периодического, сдвига, сигнала, фазового
...1 и 2 соединены с входами одновибраторон 4 и 5 соотнетстззецно, выполненных В ниде ци(эзэсэззыхЛ 13 счетчиков 13 и 14, прямые выходы которых соединены с Ч-входами запрещения счета этих же счетчиков и первым и вторым входами элемента И 6, а первый и второй входы второго элемента И 7 соединены с инверсными выходами счетчиков 14 и 13 соответственно.Выходы элементов И 6 и 7 соединены с прямым и обратным входами реверсивного счетчика 8. Выход генератора 15 соединен с С-входами счетчиков 4 и 5, триггера 9, с дополнительными входами элементов И 6 и 7, а также через инвертор 3 - с входом триггера 10.Устройство работает следующим образом.Генератор 15 вырабатывает синхроимпульсы, частота которых во много раз превосходит номинальную частоту...
Устройство для измерения отношения размаха сигнала к эффективному значению флуктуационной помехи

Номер патента: 1113909
Опубликовано: 15.09.1984
Авторы: Орловский, Попов, Филиппов
МПК: H04N 7/02
Метки: значению, отношения, помехи, размаха, сигнала, флуктуационной, эффективному
...флуктуацион3 .1113909 4ной помехи, особенно при измерении стробастро а, вычитающий счетчик 9, тригсигнала точечных объектов, так как гер 10 б лок 11 Формирования алгонаведенные на измеряемый объект пере- ритма урритма уравновешивания. Цифроаналокрестья маркерных меток могут не по- говый пре бговый прео разователь (ЦАП) 12,падать точно на изображение объекта. 5 блок 13 опорнопорного напряжения, генеЭто связано, во-первых, с ошибками ратор 14 тактовых импульсов.оператора, наводящего перекрестья Устройсойство ра отает следующимбна изображение объекта, а, во-вторых образом.с нестабильностью развертывающих В режимережиме измерения отношенияустройств телевизионной системы не О сигнал/помехУ ал помеха видеосигнал черезстабильностью...
Формирователь импульсов перехода сигнала через нулевое значение
Номер патента: 1228243
Опубликовано: 30.04.1986
Автор: Соловейчик
МПК: H03K 5/13
Метки: значение, импульсов, нулевое, перехода, сигнала, формирователь
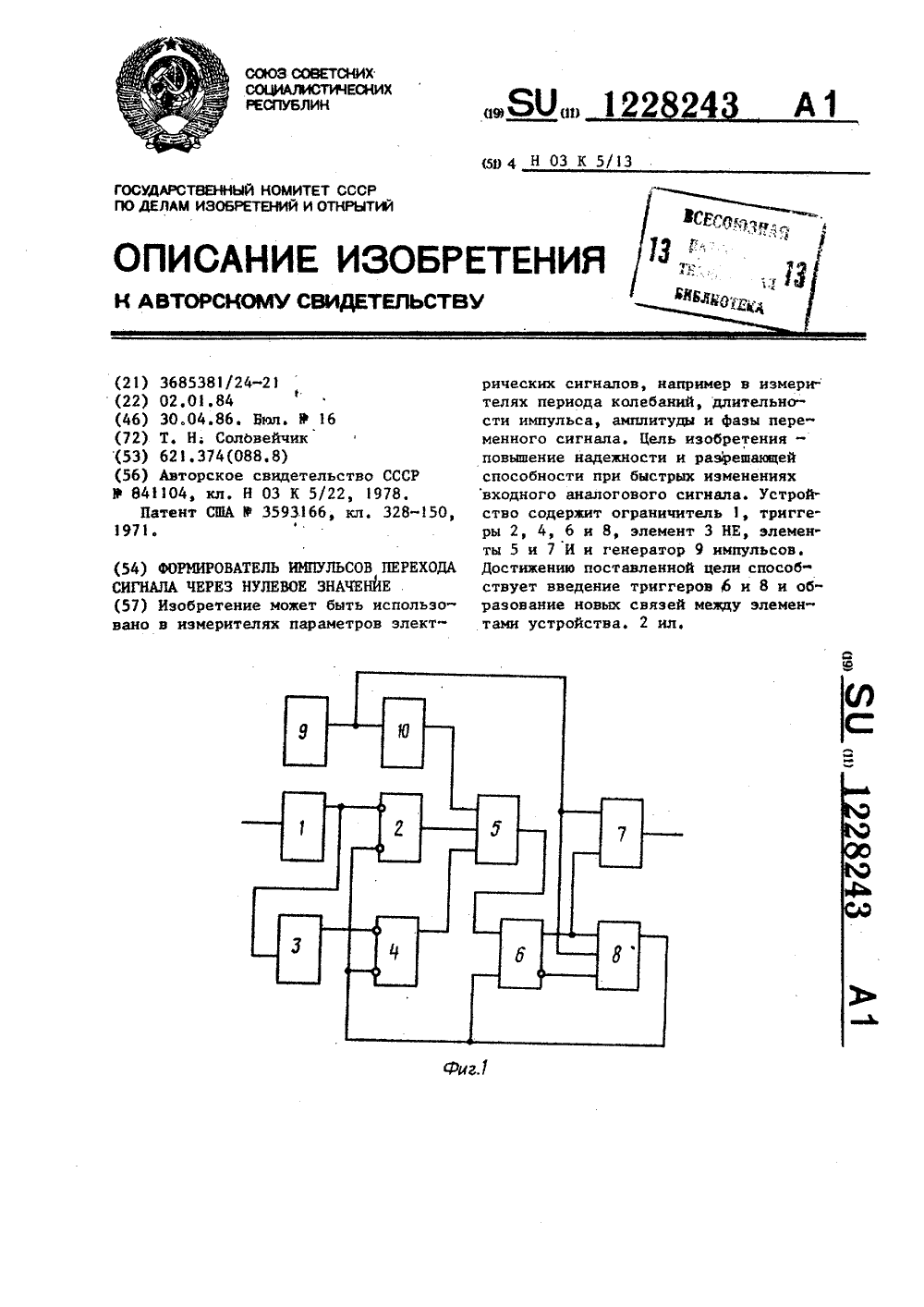
...формирователя триггеры 2, 4 и 6 находятся в нулевом состоянии, так как на входы сброса этихтриггеров подается нулевой потенциалс прямого выхода триггера 8, который,в свою очередь, перед началом работыпринудительно установлен в нулевоесостояние (шина установки не показана), Первым импульсом ат генератора импульсов высокой частоты 9(фиг. 2 я)триггер 8 устанавливается в единичноесостояние (фиг. 2 л) и на входы сбросатриггеров 2, 4 и 6 подается единичныйпотенциал, что дает воэможность управлять этими триггерами по входам установки, при этом триггер 2 сразу встает в единичное состояние (фиг. 2 е),так как на ега входе установки - нулевой потенциал (фиг. 2 В), а триггер4 встает в единичное состояние (фиг. 2 ж), когда появляется фронт(перепад)...
Устройство для измерения отношения размаха сигнала к эффективному значению флюктуационной помехи

Номер патента: 1601781
Опубликовано: 23.10.1990
Авторы: Орловский, Попов, Филиппов
МПК: H04N 17/00
Метки: значению, отношения, помехи, размаха, сигнала, флюктуационной, эффективному
...по соответствующим адресам блока 26. Прц этом блок 13 вырабатывает логическуюв слуцае если К (+)(1);, блок 14 вырабатывает логическую 1 в случае, если К(+А, а блок о - если,К-"-) )г)з, причем значения Й ц д соответсгвует табличным данныа,згБлок 16 формирования, анализируя состояние выходов блоков 13 - -15 сравнения по импульсам синхронизации ЭТУ и ПТУ, вырабатывает последовательный код данных для записи в регистр 7 и импульс записи.Сигнал Пуск, приходящий по входу 21 запуска (фиг. 5 а), проходит через элемент ИЛИ 33 и осуществляет сброс блоков 10 и 11 деления и счетчика 12.или Кроме того, сигнал Пуск задает начало цикла работы регистра последовательных приближений, на выходе которого устанавливается двоичный код, преобразуемыйЦАП 5 в...
Предыдущий патент: Электромагнитный тормоз транспорт-ного средства
Следующий патент: Устройство управления электро-двигателем постоянного toka колесноготранспортного средства
Случайный патент: Электромагнитное ригельное устройство