Устройство для программного управленияприводом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 798724
Авторы: Кочелаевский, Павленко, Родин
Текст
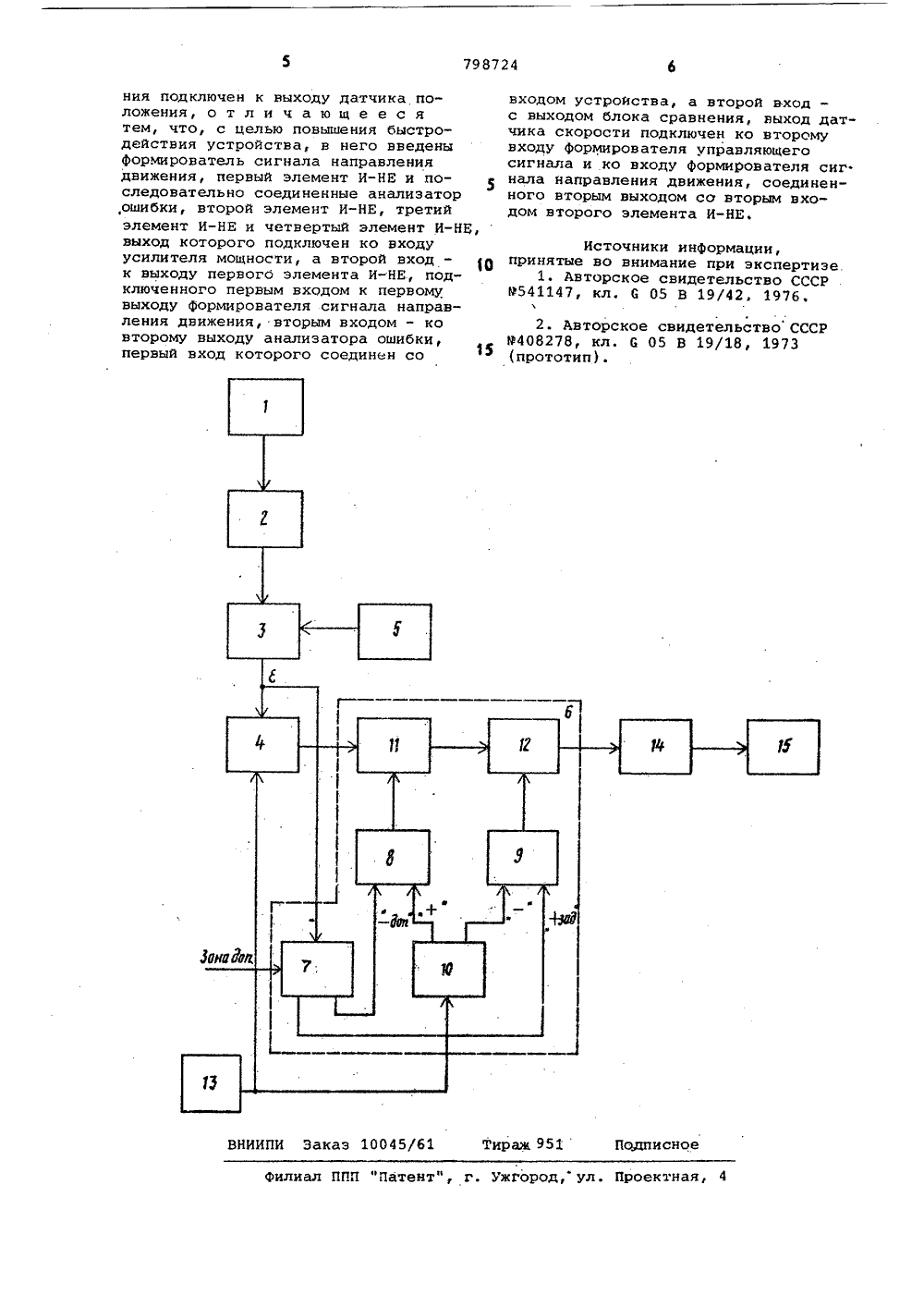
. 6 05 В 19/40 с присоединением заявки Ио(23) Приоритет Государственный комитет СССР ио делам изобретений и открытийОпубликовано 230181, Бюллетень И 9 3 Дата опубликования описания 230131(71) Заявитель о Институт технической кибернетики АН Белорусской ССР154) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯПРИВОДОМ Изобретение относится к области автоматики и предназначено для использований н циФровых устройствах управления следящим приводом.Известно устройство управления следящим приводом, содержащее управляющее устройство, генератор импульсон, блок синхронизации, реверсивный счетчик, сравнивающее устройство, дешифратор, датчик обратной связи, усилитель и двигатель 1.Однако известное устройство имеет недостаточную точность.Наиболее близким техническим решением к предлагаемому является кор ректирующее устройство для следящего электропривода, содержащее последовательно соединенные преобразователь, фазовый дискриминатор и сумма" тор упранляющих воздействий, датчик обратной связи, подключенный к соответствующему входу фазового дискриминатора, генератор тактовых импульсов, соединенный с преобразователем и датчиком обратной связи, последовательно соединенные дешифратор рассогласования, регистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования содинен с поеобразонателем, а другой - с выходом датчика обратной связи, выход преобразователя соединен с исполнительнымвходом сумматора сигнала компенсации, выход которого подключен к соответствующему входу сумматорауправляющих воздействий. В этом уст"ройстне осуществляется ныработкадополнительного сигнала компенсациискоростной коррекции 2,Недостатком устройства являетсяГограниченное быстродействие, в частности, при частых изменениях направления и скорости движения, из-эа15 потерь времени на торможение,Цель изобретения - повышение быстродействия устройства.Постанленная цель достигаетсятем, что в устройство для программно 2 О го управления приводом, содержащееусилитель мощности, выход которогоподключен ко входу исполнительногодвигателя, и последовательно соединенные блок задания программы, ре 25 нерсивный счетчик, блок сравненияи Формирователь управляющего сигнала, второй вход которого подключенко входу датчика скорости, а второйвход блока сравнения подключен к3 О выходу датчика положения, введеныформирователь сигнала направления движения, первый элемент И-НЕ и последовательно соединенные анализатор ошибки, второй элемент И-НЕ, третий элемент И-НЕ и четвертый элемент И-НЕ, выход которого подключен ко входу усилителя мощности, а второй вход - к выходу первого элемента И-НЕ, подключенного первым входом к первому выходу формирователя сигнала направления движения, а вторым входом - ко второму выходу анализатора ошибки, первый вход которого соединен со входом устройства, нторой вхрд - с выходом блока сравнения, выход датчика скорости подключен ко второму входу Формирователя управ ляющего сигнала и ко входу формирователя сигнала направления движения, соединенного вторым выходом со вторым входом второго элемента И-НЕ,На чертеже представлена блок-схе О ма устройства, содержащая блок 1 задания программы, реверсивный счетчик 2, блок 3 сравнения, формирователь 4 управляющих сигналов, датчик 5 положения исполнительного механизма , блок б экстренного торможения, включающий анализатор 7 ошибки, второй 8 и первый 9 элементы И-НЕ, формирователь 10 сигнала направления движения, третий 11 и четвертый 12 элементы И-НЕ, датчик 13 скооости, усилитель 14 мощности, а также испол. нительный двигатель 15 исполнительного механизма.Устройство работает следующим образом. 35Блок 1 выдает информацию о переМещении в виде последовательности импульсон, поступающих в счетчик 2. Частота следования управляющих импульсов определяет скорость движе О ния исполнительного механизма. Один импульс соответствует элементарному шагу перемещения. Блок 3, сравниная состояние счетчика 2 с кодом текущего положения, снимаемого с датчика 5, вырабатывает сигнал рассогласования, поступающий на Формирователь 4, который вырабатывает управляющие импульсы, ширина которых модулируется пропорционально величине рассогласования.50Сигнал формирователя 4 через элементы 11 и 12 и усилитель 14 управляет двигателем 15, Для повышения устойчивости работы устройство охвачено отрицательной обратной связью 55 по скорости, т.е. сигнал, вырабатываемый датчиком 13, в Формирователе 4 суммируется с сигналом рассогласования.Для сокращения времени торможения бО при изменениях направления и остановках управляющий сигнал " формирователя 4 подается на усилитель 14через элементы блока б, который осуществляет формирова ие сигналов 65 форсировки торможения, При этом сигналы с датчика 13 поступают на формирователь 10, который вырабатывает сигналы "+" и "-" в зависимости от направления движения,В анализатор 7 блока б вносится величина выбранной эоны отработки (ЗОНЛдоп 1 которая устанавливается меньшей допустимой ошибки. На другой вход анализатора 7 поступает сигнал рассогласования с блока 3. При превышении сигналом рассогласования.установленной эоны на. выходе анализатора 7 в зависимости от знака сигнала рассогласования, указывающего на направление движения, уменьшающее величину рассогласования, формируются сигналы "+зад" и "-зад". Эти сигналы поступают на соответствуюне входы элементов И-НЕ 8 и 9. На вторые входы этих элементов поступают сигнаты "+" и " в ", указывающие на действительное направление движения.При совпадении сигнала "+зад." и "+" на выходах элемента 8 и "+зад" и "-" на входах элемента 9 формируются уровни "0" таким образом, что при движении в направлении "С" уровень "0" может быть на выходе элемента 8, при движении в направлениина выходе элемента 9.При наличии любого из этих сигналов вход усилителя 14 отключается от выхода формирователя 4.При наличии уровня "01 на выходе элемента И-НЕ 9, на вход усилителя 14 с выхода элемента 12 подается логический уровень "1", при наличии уровня "0" на выходе элемента 9 логический уровень "0", По этим сигналам усилитель 14 формирует мак.- симальное управляющее воздействие на двигатель в сторону, препятствующее продолжению движения по инерции.Сигнал Форсировки торможения снимается при величине ошибки рассогласования, не превышающей "ЗОНЫ доп." и при изменении ее знака.Введение указанных элементов позволяет Фиксировать режям торможения двигателя, чем обеспечивается возможность значительного повышения скорости при сохранении заданной динамической точности.формула изобретенияУстройство для программного управления приводом, содержащее усилитель мощности, выход которого подключен ко входу исполнительного двигателя и последовательно соединенные блок задания программы, реверсинный счетчик, блок сравнения и Формирователь управляющего сигнала, второй вход которого подключен ко входу датчика скорости, а второй вход блока сравне798724 аж 9 Подпис лиал ППП "Патент", г. Ужгород, ул. ная,ния подключен к выходу датчика положения, о т л и ч а ю щ е е с ятем, что, с целью повышения быстродействия устройства, в него введеныформирователь сигнала направлениядвижения, первый элемент И-НЕ и последовательно соединенные анализатор,ошибки, второй элемент И-НЕ, третийэлемент И-НЕ и четвертый элемент И-НЕ,выход которого подключен ко входуусилителя мощности, а второй вход - ок выходу первого элемента И-НЕ, подключенного первым входом к первомувыходу формирователя сигнала направления движения, вторым входом - ковторому выходу анализатора ошибки,первый вход которого соединен со ВНИИПИ Заказ 10045/61 входом устройства, а второй вход -с выходом блока сравнения, выход датчика скорости подключен ко второмувходу формирователя управляющегосигнала и ко входу формирователя сиг.нала направления движения, соединенного вторым выходом со вторым входом второго элемента И-НЕ,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9541147, кл. С 05 В 19/42, 197 б.2. Авторское свидетельство СССР9408278, кл, С 05 В 19/18, 1973
СмотретьЗаявка
2639913, 10.07.1978
ИНСТИТУТ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИАН БЕЛОРУССКОЙ CCP
КОЧЕЛАЕВСКИЙ ЮРИЙ НИКОЛАЕВИЧ, РОДИН ГЕРМАН АЛЕКСЕЕВИЧ, ПАВЛЕНКО ИГОРЬ ФЕДОРОВИЧ
МПК / Метки
МПК: G05B 19/40
Метки: программного, управленияприводом
Опубликовано: 23.01.1981
Код ссылки
<a href="https://patents.su/3-798724-ustrojjstvo-dlya-programmnogo-upravleniyaprivodom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управленияприводом</a>
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1328766
Опубликовано: 07.08.1987
Авторы: Головков, Кузнецов, Недвецкая, Осипов, Павлов
МПК: G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...6 обработки и программного управления поочередно подключает датчики 11 к входу АЦП 5, с выхода которого информация о величине напряженности поля в отрезке микрополосковой линии ных составляющих светового луча (необыкновенный луч) приобретает Фазо- .вьй сдвиг, онределяемый выражением 2, 2 2= 1 с 11 .з 1 п - й + 1 с 11 з 1 п1 Ъ1 Таким образом, в режиме калибровки устанавливается длина удлинителя 13 аптического пути, равная 11=(И + - ). В этом случае вышедший8из подложки отрезка микрополосковой линии 2 луч имеет сдвиг Фазы необыкновенного луча, пропорциональный квадрату амплитуды поля в данном сечении отрезка микрополосковой линии 2 и независящий от времени. Отградуировав предварительно устройство, изменяющее длину оптического пути...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1741034
Опубликовано: 15.06.1992
Авторы: Воронов, Головков, Осипов, Павлов, Приходько
МПК: G01N 22/00, G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...для реализации интерференции двух световых лучей,прошедших через сечение измерительной линии 2. Фотоприемник 13 предназначен для преобразования интенсивности светового луча на выходе сумматора 12 света в электрический сигнал. Источник 3 смещения предназначен для установки требуемой рабочей точки на модуляционной характеристике интерферометра.Устройство работает в двух режимах; режиме калибровки и режиме измерения,В режиме калибровки к измерительной линии 2 вместо исследуемого элемента подключается эталонная короткозамкнутая линия. Сигнал СВЧ-генератора 1 поступает на вход измерительной линии 2 и далее на эталонную линию. В результате интерференции падающей и отраженной волн СВЧ-сигнала в измерительной линии устанавливается режим...
Струйный пьезокерамический элемент с электрическим входом

Номер патента: 387154
Опубликовано: 01.01.1973
Авторы: Вайсман, Джагупов, Кенгерлинский, Химии
МПК: F15C 5/00
Метки: входом, пьезокерамический, струйный, электрическим, элемент
...между этими электродами, поляризованы,Это позвол укцию и повысить над методОМ напыления или металлйзацйи нанят сится на стенки питающего канала, перпендикулярные плоскости пластины. Электрод 4 электрически соединен с серебряной пленкой.5 Области п 1 и п 2 соответственно между электродом 2 и серебряной пленкой и электродом 3 и серебряной пленкой неполяризованы и обладают пьезоэффектом.Управление потоком воздуха с помощью 10 внешнего электрического сигнала в описаннойконструкции струйного элемента осуществляется следующим образом, Электрический сигнал подается на электроды 2, 3 и 4, в результате чего между серебряной пленкой и элект родами 2 и 3 в областях, обладающих пьезоэффектом, возникает электрическое поле. За счет...
Устройство для диагностирования взаимосвязанных электронных блоков и элементов блоков

Номер патента: 1441356
Опубликовано: 30.11.1988
Авторы: Зюбан, Парамонов, Трубицын
МПК: G05B 23/02
Метки: блоков, взаимосвязанных, диагностирования, электронных, элементов
...входывторого дешифратора 14, кроме того,1 через группу элементов ИЛИ-НЕ 16,116,2 на второй и третий входы элемента ИЛИ 17.С выходов 42-45 первого дешифратора 9 сигналы поступают на соответствующие индикаторы 10.1-10.4 блока 10индикаторов.С выходов 56-59 второго дешифрато"ра 14 сигналы поступают соответствен- ЗБно через первую и вторую группы клю"чей 18, 19 на соответствующие индика"торы 20.1-20,4 и 21.1-21.4 блоков 20и 21 индикаторов.С выхода элемента ИЛИ 17 сигналыпоступают на управляющие входы ключейпервой 18 и второй 19 группы, причемна управляющие входы первой группы18 непосредственно, а на управляющиевходы второй группы ключей 19 черезэлемент НЕ 22,Индикаторы включаются при поступлении на их входы сигналов "1"...
Устройство формирования опорного сигнала системы движения для мессбауэровского спектрометра

Номер патента: 1672326
Опубликовано: 23.08.1991
Авторы: Абрамов, Бабикова, Батеев, Нилов, Филиппов
МПК: G01N 24/00
Метки: движения, мессбауэровского, опорного, сигнала, системы, спектрометра, формирования
...фиг. 2.В начальный момент времени на инверсном выходе первого Т-триггера 6 стоит уровень логической единицы, и импульсы,проходя через элемент И-НЕ 11, поступаюна вход прямого счета первого счетчика 14,после прохождения 4000 (или 4096) импульсов на выходе элемента И 20 формируетсяотрицательный сигнал, который через второй формирователь 19 поступает на С-входсчетчика 14, запоминая состояние, стоящеена его информационных входах 32 - 34 (т,е,3999 или 4095) и, тем самым, предотвращаяавтоматический сброс счетчика 14 в нольпосле его заполнения, Запоминание длится30 мкс, что соответствует длительности трехтактовых импульсов частотой 50 кГц. Длительность определяется формирователем19. Благодаря этому в вершине треугольного сигнала образуется...
Предыдущий патент: Система числового программногоуправления электроэрозионным ctahkom
Следующий патент: Устройство для управления приводомпериодической подачи
Случайный патент: Затвор для дверей товарного вагона