Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
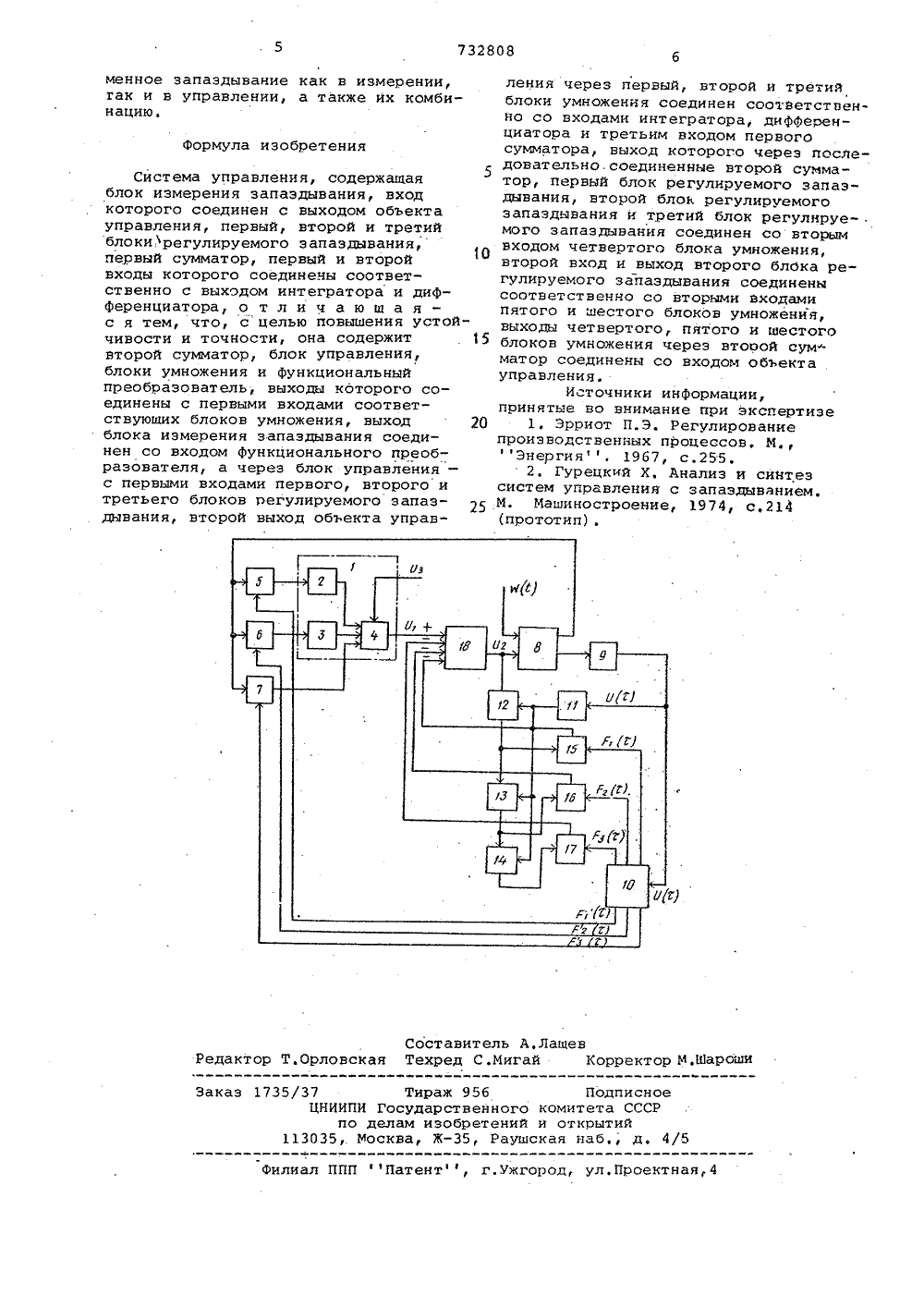
20 0 единеи соответстненно со входамиинтегратора, дифференциатора и третьим входом первого сумматора, выходкоторого через последовательно соединенные второй сумматор, первый,второй и третий блоки регулируемогозапаздывания соединен со вторым входом четвертого блока умножения. Второй вход и выход второго блока регу.лируемого запаздывания соединенысоответственно со вторыми входами10пятого ишестого блоков умножения,выходи четвертого, пятого и шестогаблоков умножения через второй сумматор соединены со входом объектауправления.,На чертеже представлена структурная схема предлагаемой системы управления,Система управления содержит пропорционально-интегрально-дифференциальный (ПИД) регулятор 1, состоящийиз интегратора 2, дифференциатора 3и сумматора 4, корректирующие блоки,реализуемые на первом, втором итретьем блоках умножения 5-7, подключенный к объекту управления 8первого или второго порядка с переменным запаздыванием блок 9 измерения запаздывания, к выходу которогоподключены функциональный преобразователь 10 и блок управления 11, служащий для пеенастройки первого,второго и третьего блоков 12-14 регулируемого запаздывания, в зависимости от текущего значения временного запаздывания, В системе можетбыть применено и блоков регулируемого запаздывания. Но достаточно иметьтри блока. Блоки 12-14 соединеныпоследовательно. Функциональный преобразователь 10 служит для Формирования сигнлон Р, (Г), Рр,(С) р Рз и 4Р 1 , Р (3), Р (Г), где Р 1),Ра(7), Р(1) служат для установкиоптимальных коэффициентов динамической обратной связи корректирующихустройств блоков умножения 15-17, асигналы Р (С), Р(Г) и Рз(7) - дляустановки оптимальных коэффициентовдля блоков умножения 5-7, Выходсумматора 4 соединен с положительнымвходом сумматора 18, а выходы блоковумножения 15-17 подключены к отрицательным входам сумматора 18, На входсумматора 4 поступает сигнал задания1), а на объект управления 8 действует возмущение. И(1),Система упралления работает следуюшйм.образом, В интервале времениО-Т, равном интервалу запаздынания,объект неуправляем, В интервалеГ 4 (1,3 С блок 9 измеряет Фактическую величину запаздывания и сигнал,пропорциональный запаздыванию У(1),подается на блок управления 11, который настраивает блоки 12-14 регулируемого запаздывания на запаздывания,равные - . Кроме того, сигнал 0(Г)В интервале 2,33дополнительно включается третья корректирующая обратная связь, реализуемая за счет использования сигнала ( в Г ), который поступает на третий блок умножения 17, где умножаеася на коэффициент оптимальной обратной связи Р, а результирующий сигналО(1 в Г ) Р подается на отрицательный вход сумматора 18. На этом интервале управления общий коэффициент усилия корректирующего устройст 1+7 +Ъа(Е)+Уз(ЕТаким образом, для любого,текуше значения Х обеспечиваются оптимальные параметры настройки регулятора, и чем больше число используемых в системе блокон регулируемого запаздыия, тем точнее реализуется закон имального управления.Данная система автоматического управления является более устойчивой, чем известныеобладает повы-. шенной точностью и быстродействием. Кроме того, система позволит расширить класс объектов упраьления, так как обеспечивает оптимальное управление по квадратичному критерию качестна объектами, содержащими ере" го ван опт подается на функциональный преобразователь 10, который Формирует сигна-лы Р 1 (1 ) Ра (1), Р ГГ) и РРа (С)Р, (С),В указанном интервале 7; 41, 33Формируется сигнал У, равный К 4 Уэ,где К 4 - коэффициент усиления сумматора 4, а У - входной сигнал задания, чем обеспечивается форсированная отработка сигнала рассогласования между сигналом задания и выходным сигналом объекта Уо .На интервале 1,3 С( 1,66 Сначинает действовать отрицательнаяобратная связь, Сигнал, пропорцио- .нальный значению управления .в момент1=0, 1(1 в в ) поступает через первыйблок регулируемого запаздывания 12на пятый блок умножения 15, где осуществляется .его умножение на коэффициент оптимальной обратной связи,соответствующий текущему значениювремени запаздывания, Сигнал, равныйпроизведению Б(1 -) Р,(7), поступаетХна отрицательный вход сумматора 18,чем обеспечивается уменьшение общего.коэффициента усиления.В интервале 1, 66 Г(2 дополнительно включается вторая обратнаясвязь, которая реализуется з счетиспользования сигнала Ц(1 -), подаваемого на блок умножения 16, где умножается на коэффициент Р(С) оптимальной обратной связи, а результирующий сигнал О( в - ) Р(Т) подаетсяР,Гна отрицательный вход второго сумматора 18, В этом интервале управленияобщий коэффициент усилия корректирующего устройства становится равнымКн732808 Формула изобретения Составитель А,ЛащеТехред С.Мигай Орловская ректор М.Шароши едак 37 Тираж 956 ЦНИИПИ Государственн по делам изобрете 3035,. Москва, Ж, РПодпи го комитета С ий и открытий ушская наб оеР акаэ 1735 4/5 Филиал ППП 1 Патент, г.ужгород, ул.Проектна менное запаздывание как в измерении,гак и в управлении, а также их комбинацию,Система управления, содержащая5 блок измерения запаздывания, вход которого соединен с выходом объекта управления, первый, второй и третий блоки.1 регулируемого запаздывания, первый сумматор, первый и второй входы которого соединечы соответственно с выходом интегратора и дифференциатора, о т л и ч а ю щ а я - с я тем, что, с целью повышения устойчивости и точности, она содержит 15 второй сумматор, блок управления, блоки умножения и функциональныйпреобразователь, выходы которого соединены с первыми входами соответствующих блоков умножения, выходблока измерения запаздывания соединен со входом Функционального преобразователя, а через блок управления - с первыми входами первого, второго и третьего блоков регулируемого запаздывания, второй выход объекта управления через первый, второй и третийблоки умножения соединен соответственно со входами интегратора, дифференциатора и третьим входом первогосумматора, выход которого через последовательно.соединенные второй сумматор, первый блок регулируемого запаздывания, второй блок регулируемогозапаздывания и третий блок регулируемого запаздывания соединен со вторымвходом четвертого блока умножения,второй вход и выход второго блОка регулируемого запаздывания соединенысоответственно со вторыми входамипятого и шестого блоков умножения,выходы четвертого, пятого и шестогоблоков умножения через второй сумматор соединены со входом объектауправления.Источники информации,принятые во внимание при экспертизе1, Эрриот П.Э. Регулированиепроизводственных процессов. ИЭнергия, 19 б 7, с.255.2, Гурецкий Х. Анализ и синтезсистем управления с запаздыванием.М. Машиностроение, 1974, с.214
СмотретьЗаявка
2557027, 20.12.1977
Заявитель 732808 С)
СТАМБОЛИ ВИКТОР АЛЕКСЕЕВИЧ, ШКОНДИН ВИКТОР ПЕТРОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/3-732808-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Частотно-регулируемый электропривод

Номер патента: 1372579
Опубликовано: 07.02.1988
Авторы: Верник, Коломойцева, Пружанский, Соседка
МПК: H02P 7/42
Метки: частотно-регулируемый, электропривод
...регулирования параметров электропривода. На выходах обоих каналов регулирования .формируются управляющие сигналы Н и У , которые в блоке 9 вычисленияИфазных задающих воздействий преобразуются из вращающейся системы коорди нат в неподвижную, а затем из двухфазной системы координат в трехфазную. Таким образом, на выходе блока 9 формируются три задающих сигнала, поступающие на вход преобразователя 2 частоты. Преобразователь 2 частоты отрабатывает задающие воздействия, и асинхронный двигатель 1 разгоняется. В блоке 12 производится вычисление тока намагничивания, а в блоке 13 - выделение соответствующих составляющих токов д, ии их произ 40 водных, которые используются в качестве сигналов обратных связей для регуляторов 6 и 8.При ударном...
Устройство для умножения s-ичных цифр в позиционно остаточной системе счисления

Номер патента: 1633401
Опубликовано: 07.03.1991
Авторы: Евстигнеев, Кошарновский, Кузнецов, Ревзин
МПК: G06F 7/72
Метки: s-ичных, остаточной, позиционно, системе, счисления, умножения, цифр
...вторые иноряионць 20 элементов И объединен с входом втовходы коммутаторов 16 и 17 проходятрого сомножителя первого блока умноня выходы последних, я с их выходовжения и входом первого сомножителя в виде величин с 5 с 18 и третьего блока умножения, выход котоофпоступают ня входи блоков 5-8 умноже- рого соединен с вторым инАормяциоцьм ния, вторые входы блоков 12 и 10 эл 25 входом пеРвого коммУтатоРа, вход втоментов И и перне входы блоков 13 и рого сомножителя третьего блока ум элементов И. Величины с В и 1 Бножеция соединен с первым входом через блоки 10 и 12 элементов И и с пеРвого блока хранения констант и вхо -поступают ца сумматор 3 величины с и 1дом первого сомножителя четвертогоУ о и очеРез блоки 13 и 15 элементов И по 30 блока...
Способ определения энергетического ресурса аккумулятора

Номер патента: 877656
Опубликовано: 30.10.1981
Авторы: Калашников, Константинов, Павлов, Савельев, Углев
МПК: H01M 10/42
Метки: аккумулятора, ресурса, энергетического
...температура электролита, выше которой коэффициент эффективности заряда аккумулятораимеет постоянное значение,На чертеже изображена блок-схемадля решения уравнения (1). ЬОСпособ осуществляется следующимобразом.Аккумулятор 1 работает в буферном режиме с генератором 2 на нагрузку 4, ва который поступают сигна лы 5 - 7 подсоединяют к нелинейному блоку 8 и блокам 9 и 10 умножения. На нелинейный блок 8 с выхода измерительного блока 4 подают сигналы 11 и 12, на блок 9 умножения сигналы 12 и 13, на блок 10 умножения - сигналы 12 и 14. Выход блока 9 умножения подсоединяют к интегратору 15, с выхода которого сигнал подают на вход блока 16 умножения, на второй вход которого подают сигнал с нелинейного блока 8. Выход блока 10 умножения подсоединяют...
Адаптивная система регулирования многомерного объекта

Номер патента: 1174901
Опубликовано: 23.08.1985
Авторы: Авдеев, Емельянов, Киселев, Коровин, Мышляев, Поляк, Солодков, Сульман
МПК: G05B 13/02
Метки: адаптивная, многомерного, объекта
...блоки сравнения, вторыемасштабирующие блоки выходы кото 9ЗОрых подключены к входам второго сумматора, входы вторых экстраголяторовсоединены с выходом второго фильтранизкой частоты, а выход второго сумматора - с одним из входов первогосуш 1 атора, последовательно соединенные пятый блок сравнения, ин рционное звено первого порядка, третиймасштабирующий блок, выход которогосоединен с одним из входов второго4 бблока суммирования шестой блоксравнения, подключенный своими входами к выходу третьего Фильтра низкойчастоты и выходу первого масштабирующего блока, который соединен также с одним из входов первого сумматора, третьи блоки задержки, входыкоторых соединены с выходом шестогоблока сравнения, выход последнегоиэ третьих блоков задержки...
Устройство для контроля и коррекции сигнала цветного изображения на видеоконтрольном блоке

Номер патента: 1304762
Опубликовано: 15.04.1987
Метки: блоке, видеоконтрольном, изображения, коррекции, сигнала, цветного
...микропроцессора 25сигнал поступает на входы соответственно первого - четвертого блоков 25 памяти, в которых хранится видеоинформация, Если на управляющие входы пятого, - восьмого вентилей 15-18поступает соответствующий инверсныйсигнал с блока 9 управления, то указанные вентили пропускают видеоинформацию соответственно с первого - четвертого блоков 2-5 памяти через преобразователь 6 сигналов У, М, С и Кв сигналы К, С и В и преобразователь8 цифра - аналог на видеоконтрольныйблок 7,Блок 27 задания сигнала координат формирует сигнал с возможностью перемещения по экрану цветного видеоконтрольного блока. Первый - четвертый блоки 2-5 памяти форьжруют на экране видеоконтрольного блока 7 эталонное изображение в виде рамки на цветовом поле,...