Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 723509
Авторы: Владов, Данилевский, Соколовский

Текст
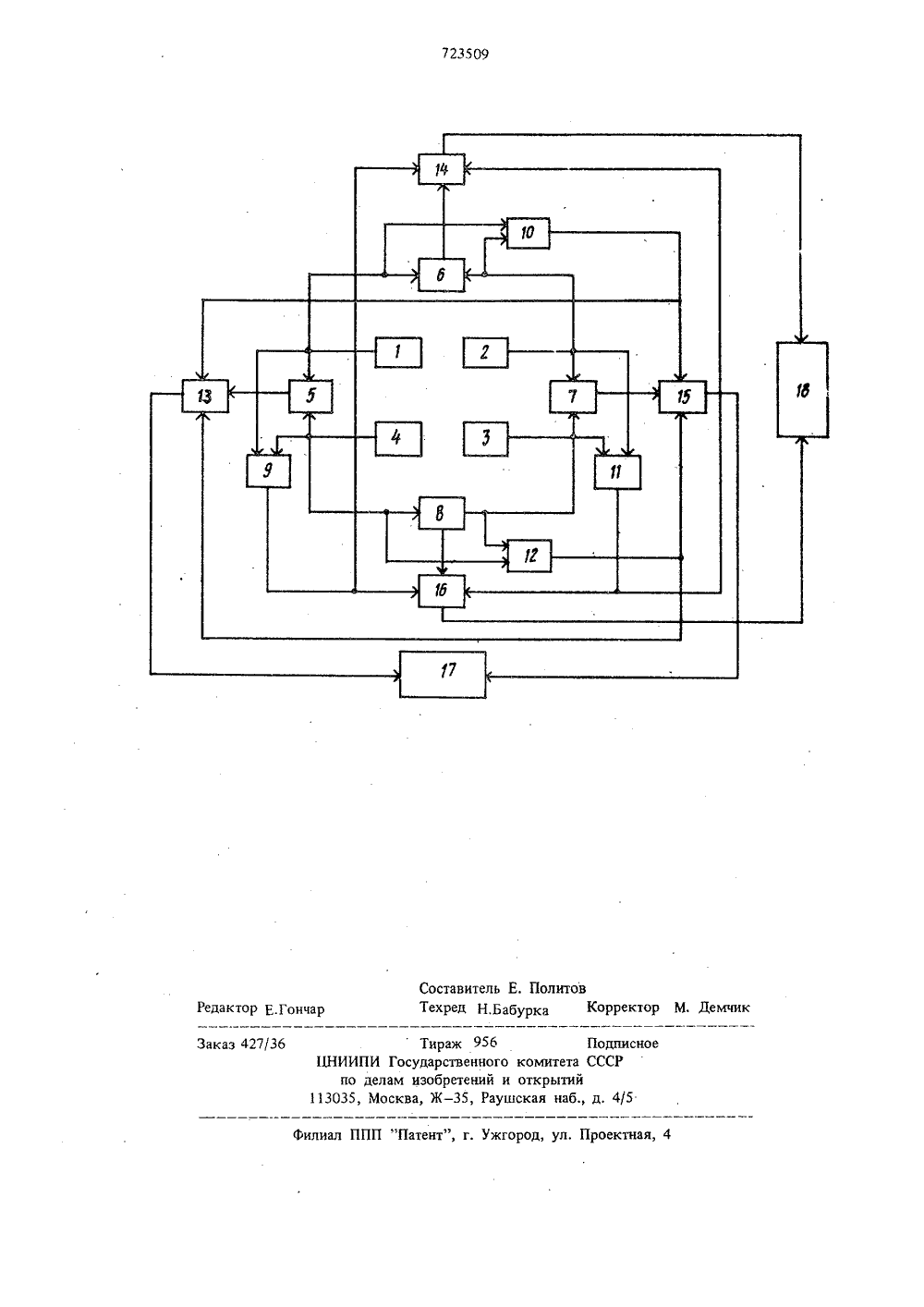
Союз СоветскииСоциалистическихреспублик нн 723509(ы)ч. кл.6 05 В 15/00 В 25 Ю 13/00 Гевудвраевииый квкитит СС 6 Р(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ Изобретение относится к роботогехнике и может быть использовано при создании систем управл ения адаптивным роб ото м,Извесно устройство для управления адаптивньм роботом, содержагцее исполнительный орган оо о;а с установленными на его схвате тактильными датчиками и управляюцую вычислительную машину 13. Устройство имеет сложную конструкцию. Наиболее близким техническим решением10 к изобретеншо является устройство, содержагцее установленные на схвате исполнительного органа тактильные датчики, блоки управления и управляющую вычислительную машину (2).35Это устройство управляется вычислительной машиной и поэтому является сложным и име.ет длительный процесс совмещения центра схвата с ценром детали.20Целью изобретения является упрощение уст.ройства.Это достигается тем, чо устройство содержит четыре элемента И, четыре элемента ИЛИ и че,ыре элемента И - НЕ, причем выход первого тактильного датчика соединен с первымвходом первых и вторых элементов ИЛИ иИ - 11 Е, выход второго тактильного датчикаподключен к второму входу вторых элементовИЛИ и Р 1-НЕ и первому входу третьих элементов ИЛИ и И - НЕ, выход третьего. тактильного даэчика соединен с вторым входом речьих элементов ИЛ 1 и И-НЕ и первым входомчетвертых элементов ИЛИ и И - НЕ, выход четвертого тактильного датчика подключен к второму входу первых и четвертых элементовИЛИ и И - НЕ, первый вход первого и третьего элементов И соединен с выходом соответствуюгцнх элементов ИЛИ, второй вход - свыходом второго элемента И - НЕ, третий входс выходом четвертого элемента И - НЕ, а вы.ход - с соответствуюгдим входом первогоблока управления, первый вход второгои четвертого элементов И подключен к вы.ходу соответствующих элементов ИЛИ, второйвход - к выходу первого элемента И - НЕ, тре.тий вход - к выходу третьего элемента И - НЕ,а выход - к соответствующему входу второго блока управления,На чертеже представлена функциональнаясхема устройства. В ее состав входят первый,второй, третий и четвертый тактильные датчики1,2,3,4; первый, второй, третий и четвертыйэлементы ИЛИ 5,6,7,8; первый, второй, третий и четвертый элементы И - НЕ 9,10,11,12; первыйвторой, третий и четвертый элементы И 13,14,15,16; первый и второй блоки управления17 и 18.Устройство работает следующим образом. ОВ процессе работы схват робота по программе помещается зону захвата детали. Производится сжатие губок схвата. При неточномрасположении детали или неточном позиционировании схвэта при соприкосновении детали 15с схватом сработает один из датчиков, напри.мер 2, расположенный на губке схвата, Сигнал о соприкосновении через элементы ИЛИ6 и 7 поступает через элементы И 14 и 15на блоки управления 17 и 18 приводами ро 2 обота, которые начнут пе;хмещать исполнительный орган со схватом по оси Х (в данном случае направо) и по оси 1 (в данномслучае вперед), При последующем срабатывании другого датчика, например 1, т.е, совмешения центра детали с осью г на обоихвходах элемента И - НЕ 10 будут присутствовать два сигнала уровня ".", что вызоветзапрет (уровень "0") на одном из входовэлемента И 15 и остановит привод по оси Х. зоИсполнительный орган будет продолжать движение схвата по оси У до тех пор пока центрдеталй не совместигся с центром схвата, т.е.до срабатывания всех датчиков.Применение предлагаемой конструкции позволит значительно упростить устройство и снизитьего стоимость.формула изобретенияУстройство для управления адаптивным роботом, содержащее установленные на схвате исполнительного органа тактильные датчикии блоки управления, о т л и ч а ю щ е е с ятем, что, с целью упрощения устройства, оносодержит четыре элемента И, четыре элементаИЛИ и четыре элемента И - НЕ, причем выходпервого тактильного датчика соединен с пер.вым входом первых и вторых элементов ИЛ 11и И - НЕ, выход второго тактильного датчикаподключен к второму входу вторых элемен.тов ИЛИ и И - НЕ и первому входу третьихэлементов ИЛИ и И - НЕ, выход третьего так.тильного датчика соединен с вторым входомтретьих элементов ИЛИ и И - НЕ и первымвходом четвертых элементов ИЛИ и И - НЕ,выход четвертого тактильного датчика подключен к второму входу первых и четвертыхэлементов ИЛИ и И - НЕ, первый вход перво.го и третьего элементов И соединен с вы.ходом соответствующих элементов ИЛИ, второйвход - с выход м второго элемента И - НЕ,третий вход - с выходом четвертого элементаИ - НЕ, а выход - с соответствующим входомпервого блока управления, первый вход второго и четвертого элементов И подключен квыходу соответствующих элементов ИЛИ, вто.рой вход - к выходу первого элемента И - НЕ,третий вход - к выходу третьего элементаИ - НЕ, а выход - к соответствующему входувторого блока управления.Источники информации,принятые во внимание при экспертизе1. Пособие по применению промышленных роботов, ред, Капухико Нода. М., "Мир", 1975, с, 292, 293,2. Белянин П. Н, Промышленные роботы, М "Машиностроение", 1975, с. 365 - 368723509 Составитель Е. ПолитовТехРед Н,Бабурка КоРРектоР М, Де Редактор Е.Г Заказ 427/3 ное роектная, 4 ПП "Патент", г. Ужгоро ил Тираж 956 Подпи ЦНИИПИ Государственного комитета ССС по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4
СмотретьЗаявка
2671263, 26.09.1978
ПРЕДПРИЯТИЕ ПЯ М-5671
СОКОЛОВСКИЙ ФЕЛИКС ПАВЛОВИЧ, ДАНИЛЕВСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, ВЛАДОВ ИГОРЬ ЛЬВОВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: адаптивным, роботом
Опубликовано: 25.03.1980
Код ссылки
<a href="https://patents.su/3-723509-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Мажоритарный элемент

Номер патента: 1538249
Опубликовано: 23.01.1990
МПК: H03K 19/23
Метки: мажоритарный, элемент
...элемент работает следующим образом.Для реализации мажоритарной функции "6 или более из 11" к шинам 7-17 подаются входные переменные Х 1-Х 11При этом, если в кодовых комбинацияхвходных переменных Х 1-Х 11 содержатся шесть или более логических единиц("1"), то на выходе 28 мажоритарного элемента появляется единичный логический сигнал, а в остальных случаях нулевой логический сигнал ("О").Реализация мажоритарной функции "5 или более из 9" осуществляется при приложении к двум из входов переменных постоянных нулевых сигналов, а к остальным входам - девяти переменных Х.Аналогично этому для реализации мажоритарной Функции "4 или более из 7 н постоянные нулевые сигналы прикладываются к четырем входам переменных, для реализации...
Устройство для автоматического регулирования возбуждения синхронной машины

Номер патента: 587893
Опубликовано: 05.01.1978
Автор: Чеслав
МПК: H02P 9/14
Метки: возбуждения, синхронной
...элемент гибкой обратной связи с колец ротора и выходной сумматор.Входными сигналами для элемента обратной связи по режимным параметрам могут быть отклонение частоты, мощности тока якоря или скорости ротора 111. С помощью различного сочетания фазоотстаюших и фазоопережаюших звеньев эти сигналы соответствующим образом формируются и способствуют улучшению демпфирования колебаний в послеаварийном режиме и незначительно способствуют увеличению предела статической устойчивости.С целью увеличения пределов статической и динамической устойчивости устройство для автоматического регулирования возбуждени,1 синхронной машины, содержашее источник возТОМАТИЧЕС КОГО РЕГУЛИРОВАНИЯНХРОННОЙ МАШИНЫдва интегратора и четыре усилителя, причем однй из входов...
Функциональный преобразователь

Номер патента: 696490
Опубликовано: 05.11.1979
Автор: Богословский
МПК: G06G 7/26
Метки: функциональный
...9 предназначен для согласования выходов коммутатора ординат 5 с входами задания ординат ц цв, ц, ц нелинейного интерполятора 3. Нв вход первого операционного усилителя 17 через четвертую и пятую время-импульсные проводимости 26,27 поступают сигналы ц в, и соответствующее ординатам узлов интерполяции выбранного участка. Выходное напряжение этого усилителя будет равноЪс Чв 8 9 счто соответствует линейной интерполяции между узлами б и с (фиг. 3). Сигналы 8 и 8 используются для управления второй и третьей время-импульсными проводимостями 24, 25, установленными во входных цепях четвертого операционного усилителя 20, который формирует напряжение дсоответствующее линейной интерполяции функции в расширенном интервале (фиг. 3),Ц (Лх+ Х-Х)+...
Многофункциональный модуль

Номер патента: 744550
Опубликовано: 30.06.1980
Авторы: Артюхов, Ушкарева, Шалыто
МПК: G06F 7/00
Метки: многофункциональный, модуль
...настройки для реализации представителей типов бесповоротных Формул в базисе из 5 букв,Тип Иеспово- Бесповоротнаяротной Фор- формуламулы Выход Настройка 1 г = О, г = О,22 гьг 4 25 гб=еь 2 ьЧ ЕЕЧЕЧ еу Ею =22 Ч 2 Р 2 Ч гьЧ е(Г)7 = (22 ЕЧ г ь гь ) "1 16 г17 1, г71, г723 е,0 2+ (1+1) 1 24 г,г = 0 которого подключенны соответственно к четвертому, пятому, шестому и седьмому логическим входам модуля, выходи первого и второго логических блоков подключены соответственно к первому и второму логическим выходам модуля.На Фиг. 1 приведена структурная схема многофункционального модуля; на Фиг. 2 - схема логического блока.устройство содержит логические Входы модуля 1, 2, 3, 4, 5, б и 7, логические блоки 8, логические входы логических блоков 9, 10,...
Устройство для контроля величины постоянного тока

Номер патента: 748339
Опубликовано: 15.07.1980
МПК: G05B 1/01
Метки: величины, постоянного
...вы:окий потенциал, при этом третий элемент 15 И закрыт и обеспечивает своим выходным сигналом ток55смещения 1 . Второй элемент 13 И закрыт и поддерживает открытое состояние ключа 2 в цени измеряемого тока, а выходной сигнал инвертора 14 разрешает 9работу генератора 7 раэностных токов, который выдает ток а 1, направленный в сторону, противоположную току смешения, Через туннельный диод 17 протекает ток 1-1 ФТ . Величины 1 и д 1 выбираютвхся такими, чтобыв х, двср 1 и 1 ем 4 где 1 - часть максимально допустиВХ аВ 0 Юмой величины контролируемого тока, текущая через туннельный диод;1 п - пиковый ток туннельногодиода.Если 1 , превысит ХОо,то произойдет срабатывание порогового элемента 6, на входе которого включен масштабный элемент 1,...
Предыдущий патент: Цифровая следящая система
Следующий патент: Система автоматического регулирования
Случайный патент: Купольное покрытие