Способ определения формы контролируемого предмета
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
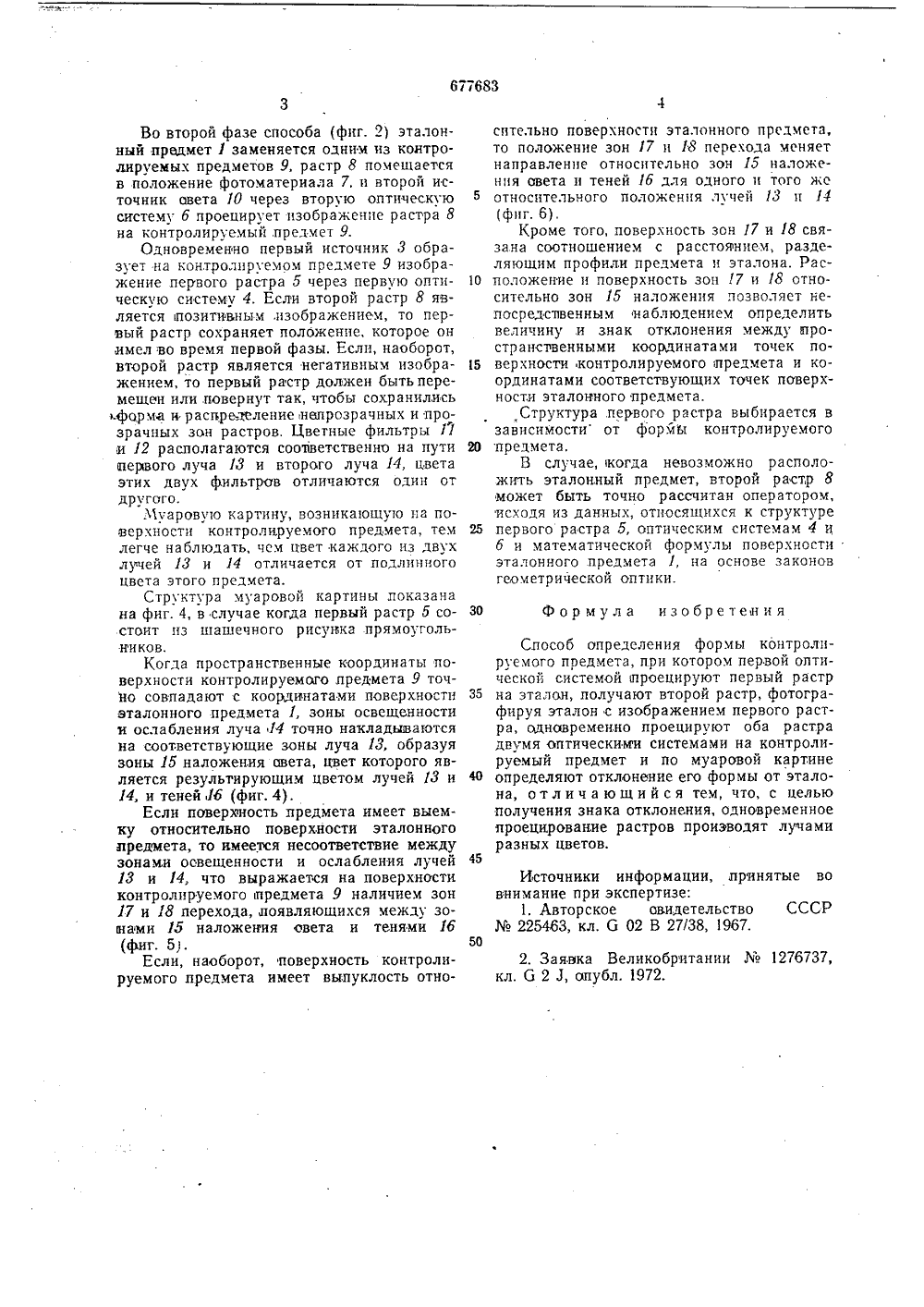
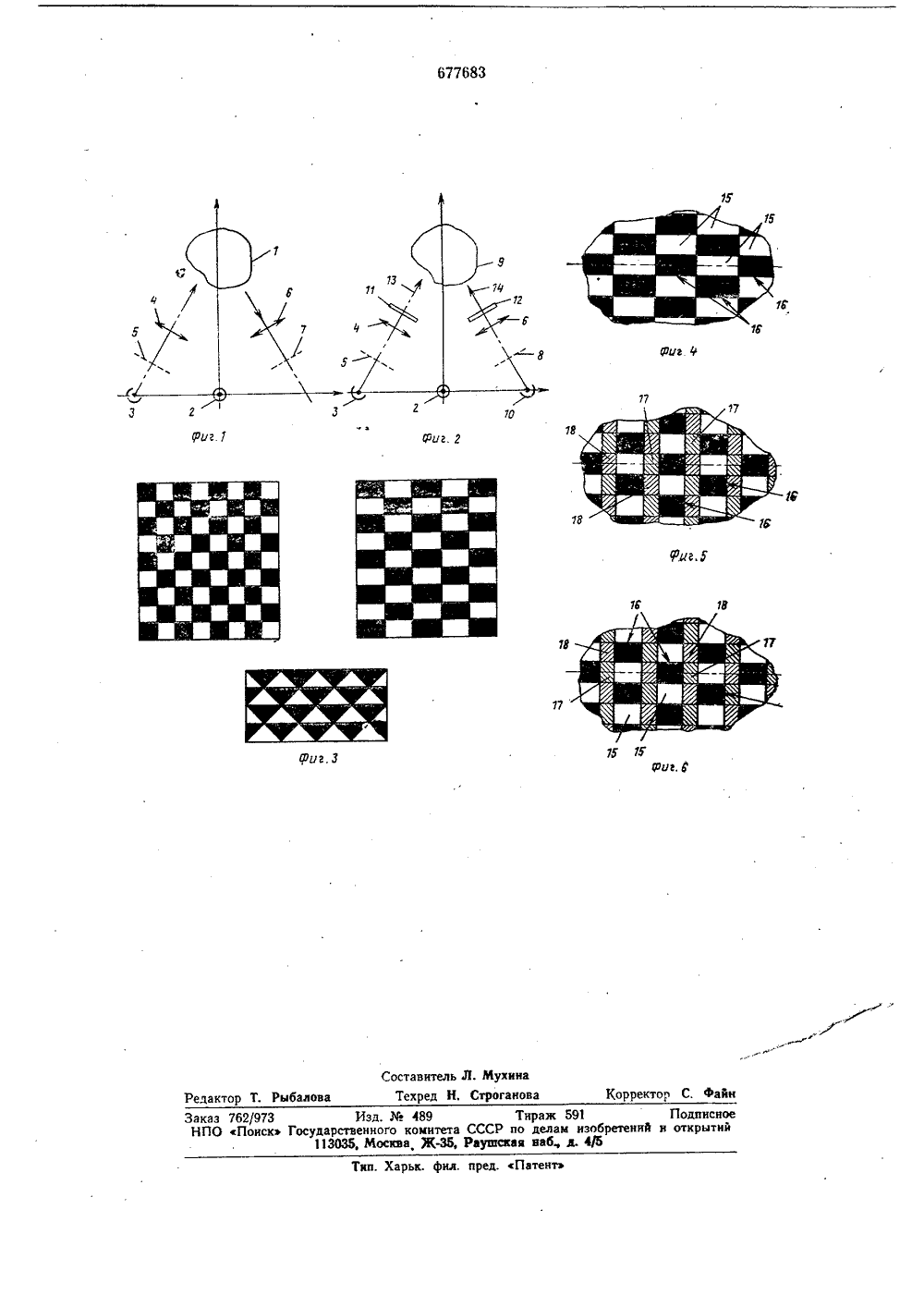
11677683 ОПИСАНИЕИЗОБРЕТЕН ИЯК ПАТЕНТУ Сове Советских Социалистических Республик(61) Дополнительное к патенту - (22) Заявлено 16,12.76 21) 242850418-10 (23) Приоритет - (32) 29.12.75 (31) 7539971 (33) Франция 151) М.Кл. С 02 В 27/38 Госулерствеинык комитет СССР по делам иэобретеиий и открытий(45) Дата опубликования описания 26.09.79(72) Авторы изобретения Иностранцы Димитри Параскевас, Ален ЛЭрмит,Пьер Кудерк и Жак Гине(Франция) Иностранная фирма Сантр Текник дез Эидюстри Меканик(54) СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ КО НТРОЛ И РУЕМО ГО П РЕДИ ЕТАИзобретение относится к оптическим способам сравнения пространственных координат точек поверхности контролируемого объемного предмета и поверхности эталонного предмета.Известен способ определения кривизны пластины на основе регистрации муаровых полос 11,Однако этот опособ ограничен применением зеркальной поверхности контролируемой пластины.Известен способ определения формы контролируемого предмета, при котором первой оптической системой проецируют первый растр на эталон, получают второй растр, фотографируя эталон с изображением первого растра, одновременно проецируют оба растра двумя оптическими системами на контролируемый предмет н по муаровой картине определяют отклонение его формы от эталона 12.Недостатком способа является .невозможность,получения знака отклонения формы контролируемого предмета от эталона,Цель изобретения - получение знака отклонения. Указанная цель достигается тем, что одновременное проецирование растров прс 1- изводят лучами разных цветов. На фиг. 1 лредставлена схема устройства для ,получения второго растра; на фиг. 2 - схема устройства, реализующего предложенный способ; на фпг, 3 даны ва рианты растровых структур; на фиг, 4, 5 и6 показана муаровая картина в случае совпадения формы предмета и эталона и в случае различной их формы.На эталонном предмете 1, положениеко О торого известно в репере 2, образуется припомощи первого светового источника 3 и первой оптической системы 4 изображение первого р а стр а 5. Этот р а стр состоит из неэтрозрачных прилегающих зон, равномерно 15 распределенных по двум секущим осям,этизоны могх т быть, например, квадратной, прямоугольной или трехугольной формы (фнг. 3).Оптической системой б изображение эта лона строится на фоточувствительном материале 7 Оптические оси систем 4 и 6 сходятся к эталонному предмету 1. Источник 8, системь 1 4 и б, растр 5 и фоточувствительный материал 7 имеют неподвижное поло жение, показанное в репере 2. Изображение эталона со апроецированным на него растром 5, полученное на фоточувствительном материале 7, используется ЗО в качестве второго растра 8.Во второй фазе способа (фнг. 2) эталонный предмет 1 заменяется одним из контролируемых предметов 9, растр 8 помещается в положение фотоматериала 7, и второй источник авета 10 через вторую оптическую систему 6 проецирует изображение растра 8 на контролируемый, предмет 9.Одновременно первый источник 3 образует на контролируемом предмете 9 изображение первого растра 5 через первую оптическую систему 4, Если второй растр 8 является позитивным,изображением, то первый растр сохраняет положение, которое он имел во время первой фазы, Если, наоборот, второй растр является негативным изображением, то первый растр должен быть перемещен или повернут так, чтобы сохранились деформа и распределение непрозрачных и прозрачных зон растров, Цветные фильтры 11 и 12 располагаются соопветственно на пути первого луча 13 и второго луча 14, цвета этих двух фильтров отличаются один от другого.Муаровую картину, возникающую нг поверхности контролируемого предмета, тем легче наблюдать, чем цвет каждого из двух лучей 13 и 14 отличается от подлинного цвета этого предмета.Структура муаровой картины показана на фиг, 4, в случае когда первый растр 5 состоит пз шашечного рисунка прямоугольников.Когда пространственные координаты поверхности контролируемого предмета 9 точно совпадают с координатами поверхности эталонного предмета 1, зоны освещенности я ослабления луча 14 точно накладываются на соответствующие зоны луча 13, образуя зоны 15 наложения авета, цвет которого является результирующим цветом лучей 13 и 14, и теней 1 б (фиг,4).Если поверхность предмета имеет выемку относительно поверхности эталонного предмета, то имеется несоответствие между зонами освещенности и ослабления лучей 13 и 14, что выражается на поверхности контролируемого предмета 9 наличием зон 17 и 18 перехода, появляющихся между зоыами 15 наложения света и тенями 1 б (фиг. 5).Если, наоборот, поверхность контролируемого предмета имеет выпуклость относительно поверхности эталонного предмета,то положение зон 7 и 18 перехода меняетнаправление относительно зон 15 наложения авета и теней б для одного и того же5 относительного положения лучей 3 и 14(фиг. 6),Кроме того, поверхность зон 17 и 18 связана соотношением с расстоянием, разделяющим профили предмета и эталона. Рас 10 положение и поверхность зон 7 и 18 относительно зон 15 наложения позволяет непосредственным наблюдением определитьвеличину и знак отклонения между пространственными координатами точек по 5 верхности контролируемого предмета и координатами соответствующих точек поверхности эталонного предмета.Структура первого растра выбирается взависимости от форма контролируемого20 предмета,В случае, когда невозможно расположить эталонный предмет, второй растр 8может быть точно рассчитан оператором,исходя из данных, относящихся к структуре25 первого растра 5, оптическим системам 4 и6 и математической формулы поверхностиэталонного предмета 1, на основе законовгеометрической оптики.30 Формула изобретенияСпособ определения формы контролируемого предмета, при котором первой оптическок системой лроецируют первый растр З 5 на эталон, получают второй растр, фотографируя эталон с изображением первого растра, одновременно проецируют оба растра двумя оптическими системами на контролируемый предмет и по муаровой картине 40 определяют отклонение его формы от эталона, отл и ч а ю щ и й с я тем, что, с целью получения знака отклонения, одновременное проецирование растров производят лучами разных цветов,45Источники информации, принятые вовнимание при экспертизе:1, Авторское аьидетельство СССРМо 225463, кл, б 02 В 27/38, 1967.502, Заявка Великобритании М 1276737,кл. б 2 Л, опубл. 1972,677683 77 Фиг. Составитель Л. МухинаРыбалова Техред Х. Строганова Корректор С. файн еда Заказ 762/973 Изд.489 Тираж 591НПО сПонскэ Государственного комитета СССР по делам изоб113035, Москва, Ж, Раушская иабд. 4/5Т Подписное ний и открытии
СмотретьЗаявка
2428504, 16.12.1976
Иностранцы Димитри Параскевас, Ален ЛЭрмит, Пьер Кудерк и Жак Гине, Иностранная фирма, «Сантр Текник дез Эндюстри Меканик», I
ДИМИТРИ ПАРАСКЕВАС, АЛЕН ЛЪЭРМИТ, ПЬЕР КУДЕРК, ЖАК ГИНЕ
МПК / Метки
МПК: G02B 27/38
Метки: контролируемого, предмета, формы
Опубликовано: 30.07.1979
Код ссылки
<a href="https://patents.su/3-677683-sposob-opredeleniya-formy-kontroliruemogo-predmeta.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения формы контролируемого предмета</a>
Способ нанесения растра на поверхность изделия

Номер патента: 1084599
Опубликовано: 07.04.1984
Авторы: Бахтадзе, Озбегашвили
МПК: G01B 11/16
Метки: изделия, нанесения, поверхность, растра
...на поверхности изделия и удаляют сетку Г 23.Недостатком известного способа является то, что получение отпечатка сетки на твердых материалах (например металлы) затруднено, так как требуются высокие температуры для нагревания поверхности изделия,что не.всегда возможно. Кроме того, точность нанесения растра на такие 1материалы недостаточна, так как необходимые большие усилия прижатия сетки могут привести к искажению ее формывЦель изобретения - повышение точности и прочности нанесения растра.Укаэанная цель достигается тем, что согласно способу нанесения растра на поверхность изделия, заключаю" щемуся в том, что на изделие накла 084599 2дывают токопроводящую нагревательную сетку, пропускают через нееэлектрический ток до...
Эмаль для антиадгезионных покрытий рабочих поверхностей металлических форм

Номер патента: 358340
Опубликовано: 01.01.1972
Авторы: Андрианов, Гершберг, Розанова, Хананашвили, Шипилевский
МПК: C04B 26/14, C08L 63/00
Метки: антиадгезионных, металлических, поверхностей, покрытий, рабочих, форм, эмаль
...настоящего изобретения является иопцышеиие долговечности эмали.Достигается это тем, что в качестве опвердителя она содержит полиалюмофецилсилоксан при следующем соотношении компонентов Л, М. Хананашвили, Герш бергМосковский институт тонкойВ. Ломоносова итаэросил ример состава эмали (в Связующее - эпоксиднаясмола ЭД Активный пластификатор-разбавитель ТЭГГрафнтколлоидной марки СЛэросил марки АКремнийорганическийотвер,дитель - полиалюмофенилсилоксан марки КОТехнология получения эмали следующая.В эпоксидную смолу ЭД, разогретую до температуры - 50 - 60 С, добавляют разбавитель ТЭГи наполцитсли - графит и аэросил. Смесь загружает в смсситель и тщательно псремсшнвают. Затем в нее добавляют отвердитсль н снова смешивают,...
Устройство для измерения смещения контролируемой поверхности

Номер патента: 629444
Опубликовано: 25.10.1978
МПК: G01B 11/00
Метки: контролируемой, поверхности, смещения
...е напротивдвух других граней светоделительного кубика размещены соответственно крнстеллооптическая бифоальнея линза и последовательно установленные поляроид и дополнительный фотоприемник, выход которого подключен к управляющему входу синхронногодетектора.2, Устройство по и. 1, о т д и ч аю щ е е с а тем, что микродиафмгмарасположена между передними фокадьнымиплосостями ристадлической бифокальнойлинзы в3. Устройство по пп. 1 и 2, о т л ич а ю щ е е с а тем, что, с целью расширения диапазона производимых измерений, между кристаллической бифокальнойлинзой микродиафрегмой и соответствующими гранями светоделительного кубикеустановлено но объективу.Источники информации, принятые вовнимание при экспертизе:1. Патент Великобритании М...
Способ защиты от растравливания поверхности детали вне зоны электрохимической обработки

Номер патента: 245936
Опубликовано: 01.01.1969
Автор: Блиничкин
МПК: B23H 3/00
Метки: вне, детали, защиты, зоны, поверхности, растравливания, электрохимической
...затрат, так как покрытие наносится на каждую деталь с последующей сушкой в течение продолжительного времени; после обработки покрытие снимают, Кроме того, отшелушивание покрытия в отдельных местах приводит к браку детали,Целью настоящего изобретения является повьппение надежности и удешевление защиты, Для этого над защищаемой поверхностью устанавливают токопроводящий экран, к кото. рому подведен положительный потенциал, больший, чем потенциал обрабатываемой детали.На чертеже представлена схема устройства для осуществления предлагаемого способа.На этой схеме электрод-инструмент 1 и деталь 2 соединены соответственно с минусом и плюсом основного источника питания. Над защищаемой поверхностью детали помещен токопроводящий экран 3, к...
Способ создания противопригарного слоя на рабочей поверхности литейных форм и стержней

Номер патента: 753523
Опубликовано: 07.08.1980
Авторы: Давыдов, Денисов, Попкова, Эльберт
МПК: B22C 3/00
Метки: литейных, поверхности, противопригарного, рабочей, слоя, создания, стержней, форм
...или барбатацией) до образования однородного пенообразного продукта. Пенообраэный продукт наносят на рабочие поверхности форм и стержней обычными способами, В качестве растворителей, кроме воды, могут быть использованы, например, спирт и другие жидкости. Примером реализации предлагаемого способа мо жет служить следующее;Состав используемого покрытия,:Графит черный 56Бентонит 0,5Сульфитно-спиртовая барда 10,5 3Водный раствор сульфанола4-ный 33При перемешив анни в механической пропеллерной мешалке покрытие переходит в пенообразное состояние с З 5 плотностью покрытия - 1,0 г/см ,чеэ рез 1 час - 1,0 г/см, через 3 часа 1 г/смз, через 24 часа,3 г/см;общее содержание влаги в покрытии33-35,Пониженная плотность в первыетри часа является...
Предыдущий патент: Устройство для автоматического анализа состава жидкости
Следующий патент: Устройство для проявления цветного изображения в электрографическом аппарате
Случайный патент: Сталь