Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
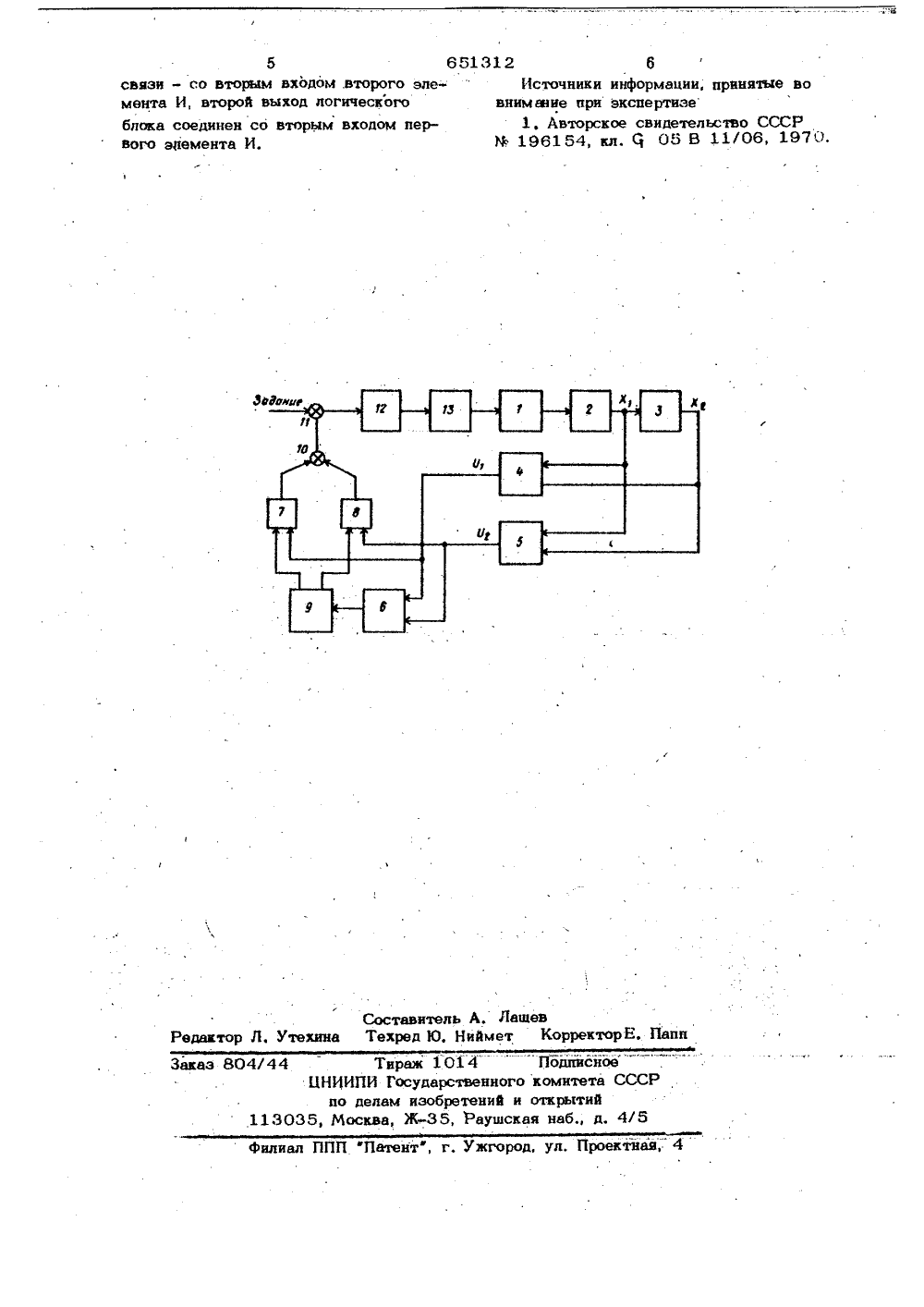
Союз Соеетсва Соцналистмцесюе Республик) Заявлено 20,12.77(21) 2557008/18 24 05 В 11/О присоединением заявки23) Приоритет арвтввнный камнтет СССР двнам нзобрвтвн и вткрытнйОпубликовано 05.03.79,Бюллетень МДата опубликования описания 07.0) СИСТЕМА УПРАВЛЕНИ дифференциаттель,Недостаткся потеря еерассогласоварабочей точкобласть), аработы,ами такой системыустойчивости при б ниях (за счет попад и системы в нелиней также низкая, точнос л льшихния ную Изобретение относится к области квазиоптимального управления объектами при наличии ограничений на величины управляющего воздействия л может быть применено в различных областях промышленности.Известна система квазиоптимального автоматического управления объектом при наличии ограничений на величину управляющего воздействия, в обратную связь которой включено в качестве регулятора оптимальное управляющее устройство 1 , Система содержит исполнительный механизм, соединенный с объектом, выход которого соединен через датчик регулируемого параметра сором, сумматор и усилиБелью изобретения является повышение точности работы и устойчивости системы при действии больших отклоненийрегулируемой величины от заданногозначения и минимизация сложното квад ратичного функционала качества (получения желаемых динамических свойствпри минимизации стоимости управления),Эта цель достигается тем, что пред-ложенная система содержит последова- О тельно соединенные первый блок обратной связи и первый элемент И и последовательно соединенные второй блок обратной связи, блок определения максимума, логический блок, второй элемент И 5, и элемент ИЛИ, выход которого соединен со входом сумматора, а второй входс выходом первого элемента И. Первыйи второй входы первого и второго блоковобратной связи соединены соответствен 2 ф но с выходами датчика регулируемогопараметра и дифференциатора. Выход первого блока обратной связи соединен совторым входом блока выделения максимума, а выход второго блока обратнойсвязи - со вторым входом второго элемента И. Второй выход логического бло " ка"соединен со вторым входом первогоэлемента И,На чертеже представлена структурная"схема "Системы" квазиойФимального управления при наличии ограничений науправляющее воздействие.Выход объекта управления 1 подключен ко входу датчика регулируемого параметра 2, соединенного с дифференциатором Э. Выходы датчика 2 и дефференциатора 3, формирующих сигналы Х 1 иХ соответственно, подключены к первому и второму блокам обратных связей4, 5, настроенных для оптимизации квадратичных функционалов .Эи Э 2 соответственно. Блоки обратных связей 4 ,и 5 формируют, управляющие воздействия Ю и Ц соответственно, мини-мизирующие критерий 3 и 0 , Выходкаждого блока обратной связи 4 и 5подключен ко входу блока выделениямаксимума 6. Выход блока 4 подключен ко второму элементу И 7, а выходблока 5 - к первому элементу И 8.Блок выделения максимума 6 подключенко входу логического блока 9, которыйосуществляет управление работой элементов И 7 и 8, что обеспечйвает"соответствующую подачу сигналов управления Ю 1 и Ц иа элемент ИЛИ 10,:;выходной сигнал которого подается череэ сумматор 11 и усилитель 12 навход исполнительного механизма 13,воздействующего на объект управления 1Система работает следующим образом;Сигнал Х 1 с выхода датчика 2 исигнал Х с выхода дифференциатора 3подаются на блоки обратных связей 5,4, настроенных таким образом, что оптимизируют функцйойалыАх 1 сх +п )д5 ,х + х Ф)осоответственно, реалиэующие при этомлинейные законы управления Б= К 1 Х++КХ и Ц- С 1 Х 1 + СХ 2.Для определенности положим, что БСиБ С,Управляющие сигналы Ои Ос выхода блоков обратной связи 4 и 5подаются на блок выделения максимума 6, который подает максимальный сигнал управления на блок 9, Если максимальный сигнал управления меньше пре-,дельно допустимого значения, то блок 9к обеспечивает прохождение максимально-,го управляющего сигнала О обратнойсвязи через элемент И 7 на элементИЛИ 10, выходной сигнал которого поступает на сумматор 11, где форми 10 руется сигнал ошибки, который усили вается усилителем 12 и подается навход исполнительного механизма 13,воздействующего на объект управления 1.Если максимаЛьный сигнал управлеО ния, поступающий с блока выделениямаксимума 6, превосходит предельнодопустимое значение, то блок 9 обеспечивает прохождение сигнала цчерезэлемент И 8 на элемент ИЛИ 10, В26 дальнейшем система работает аналогично.Такая квазиоптимальная системауправления является устойчивой придействии больших отклонений регулируемой величины от заданного значения2 (не допускается работа объекта управле ния на границе допустимых значенийуправляющих воздействий) и минимизирует сложный квадратичный функционалкачества,36Формула изобретенияСистема управления, содержащая последовательно соединенные сумматор,усилитель и исполнительный механизм,выход которого соединен с объектомуправления, выход которого через датчик регулируемого параметра соединен 4 О с дифференциатором, о т л и ч а ю -щ. и й с я тем, что, с целью повышенияустойчивости и точности рабоче системы; она содержит последовательно соединенные первый блок обратной связи 4 ф и первый элемент И и последовательносоединенные второй блок обратной связи,блок выделения максимума, логическийблок, второй элемент И и элемент ИЛИ,выход которого соединен со входом сум ф матора, а второй вход -с выходом первого элемента И, Первый и второй входы первого и второго блоков обратнойсвязи соединены соответственно с выходами датчика регулируемого параметрра и дифференциатора, выход первогоблока обратной связи соединен со вторымвходом блока выделения максимума, а выход второго блока обратной ,651312 Составитель А. Лащев Техред Ю, Ниймет Корре Редактор Л. Утехин апн аж 1.014 Подписноеударственного комитета СССизобретений и открытий-35, Раушская наб., д. 4/5 Заказ 804/44Ц 113 ППП фПатент, г. Ужгород, ул. Проектная," связи - со вторым входом .второго элемента И, второй выход логическогоблока соединен со вторым входом первого элемента И. ИИПИ Госпо деламМосква, Ж 6 Источники информации, принятые во внимвюие при экспертизе 1, Авторское свидетельство СССР
СмотретьЗаявка
2557008, 20.12.1977
СТАМБОЛИ ВИКТОР АЛЕКСЕЕВИЧ, ШКОНДИН ВИКТОР ПЕТРОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 05.03.1979
Код ссылки
<a href="https://patents.su/3-651312-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для контроля и диагностики цифровых блоков

Номер патента: 1388871
Опубликовано: 15.04.1988
Авторы: Костюкевич, Толочанов
МПК: G06F 11/16
Метки: блоков, диагностики, цифровых
...через открытый элемент И 8 на вход 50 сигнатурного анализатора 11 и поступает на вход запуска его Аор-. мирователя 31 интервалов измерения(Аиг.5), который Аормирует по импуль су запуска импульсустановки, и после окончания импульса запуска переходит в состояние измерения. Импульс установки, пройдя через открытый элемент И 33, устанавливает регистр 32 сдвига в единичное состояние и триггер 14 задним Аронтом - в единичное состояние с выхода 54 сигнатурного анализатора 11. Единичный сигнал триггера 14 проходит через элементы И 4, ИЛИ 7 и устанавливает триггер 9 в нулевое состояние, что приводит к закрыванию элемента И 8 и прекращению прохождения последующих импульсов запуска.двоичной последовательности проверя"емой точки - сигнатуры,В...
Умножитель частоты

Номер патента: 1332316
Опубликовано: 23.08.1987
Автор: Попов
МПК: G06F 7/68
Метки: умножитель, частоты
...через элемент ИЛИ 10 установку в единичное состояние счетчика 2. Третий импульс управленияобеспечивает запись "1" в младшийразряд регистра 20 сдвига (по входусинхронизации) и увеличивает содер"жимое счетчика 2 (импульсов) на единицу. Счетчик 21 выполняет функциюсчетчика числа отсчетов, выходы которого подключены к адресным входамПЗУ 22, где хранятся значения шагаалгоритма 3 К 3, представленные дво"ичными кодами. Для первого отсчета,что следует из (6), 3 1=1, для второго отсчета 12=0,5; для третьего -13=0,333 и т.д. Каждый из 1 К,К=(1,в), аппроксимируется двоичнымрядом, те. представляется в видесуммы нормирующих множителей, кратных степеням двойки3.К=7 2а.,где а. - коэффициент участия 3 й дво 1ичной дискреты в формировании...
Цифровой преобразователь координат

Номер патента: 943715
Опубликовано: 15.07.1982
Авторы: Дауров, Кнышев, Скибинский, Сливицкий, Чекаловец
МПК: G06F 7/548
...в данном такте нулевой, поэтому необходимо оразу же переходить к обработке следующего разряда регистра 3. Это осуществляется автоматически с помощью логического элемента ИЛИ-НЕ 14, на выхо ды которого поступают все выходы распределителя 13. Если подключаемый раз ряд имеет нулевое значение (неподключенные выходы распределителя имеют нулевые значения), то на выходе элемента ИЛИ-НЕ 14 возникает единичный сигнал, поступающий через элемент ИЛИ 23 блока ущавления 17 на управля ющий вход распределителя 13, осуществляя его переключение (сдвиг) на следующий разряд регистра 3. Данная организация обработки разрядов кода угла Кпозволяет сократить общее количество тактов преобразования. Учитывая, что количество единиц н нулей в коде статистически...
Устройство для контроля неодновременности коммутации электрических контактов

Номер патента: 951245
Опубликовано: 15.08.1982
Автор: Зиновьев
МПК: G05B 23/02
Метки: коммутации, контактов, неодновременности, электрических
...цепь из логического элемента И 12, логического элемента И 13,счетчика импульсов 14 и формирователя импульсов 15. Счетчик импульсов 14 соединенс логическими элементами И 16 и 17, которыеподключены соответственно к триггерам 18и 19. К другим входам логических элементовИ 16 и 17 подключены выходы триггера 20.Неподвижные контакты контролируемого аппарата 21, 22, 23 и 24 подключены к соответствующим выводам,Работу устройства и допусковый контрольвеличин неодновременности коммутации контактов при помощи его рассмотрим применителыго к процессу переключения контактов приперемещении подвижной системы электрическихаппаратов из разомкнутого состояния в замкнутое,В процессе перемещения под действиемсинхронного электропривода 1 в момент...
Устройство для преобразования двоичного кода в унитарный код

Номер патента: 524178
Опубликовано: 05.08.1976
Автор: Шестопалов
МПК: G06F 5/04
Метки: двоичного, код, кода, преобразования, унитарный
...входом установки " единицы " первого разряда второго регистра. 30Источники информации, принятые во вниманиепри экспертизе:1, Авт. св. СССР У. 263276 Мклб 06 1 5/04 от24 М 1968 г.Зф 2.ления ц управляемых делителях 13 и 12 в процессепреобразования имеет значения сначала, соответсгвец.но 2 и 1, а затем 1 и 2,.и цри преобразовании на вы.ход поступает число импульсово То 2 2" ер 10,и начальное состояние. 11 осгуплсццс указан.кного импульса на выходы Хостальных элементов "И.11 Е" в гругшах 20 и 21 лишь подтверждает состояние остальных триггеров регистров 8,9. Бла. годаря этому в управляемом дслигеле частоты 13 устанавливается коэффициентделеция, равный единице. Такой же коэффициент деления будет и в управляемом делителе частоты 12.Следующий...
Предыдущий патент: Нелинейное корректирующее устройство
Следующий патент: Пневматический шаговый экстремальный регулятор
Случайный патент: Безыммерсионный зеркально-линзовый объективмикроскопа