Система управления судном
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 644666
Авторы: Катышева, Мордовченко

Текст
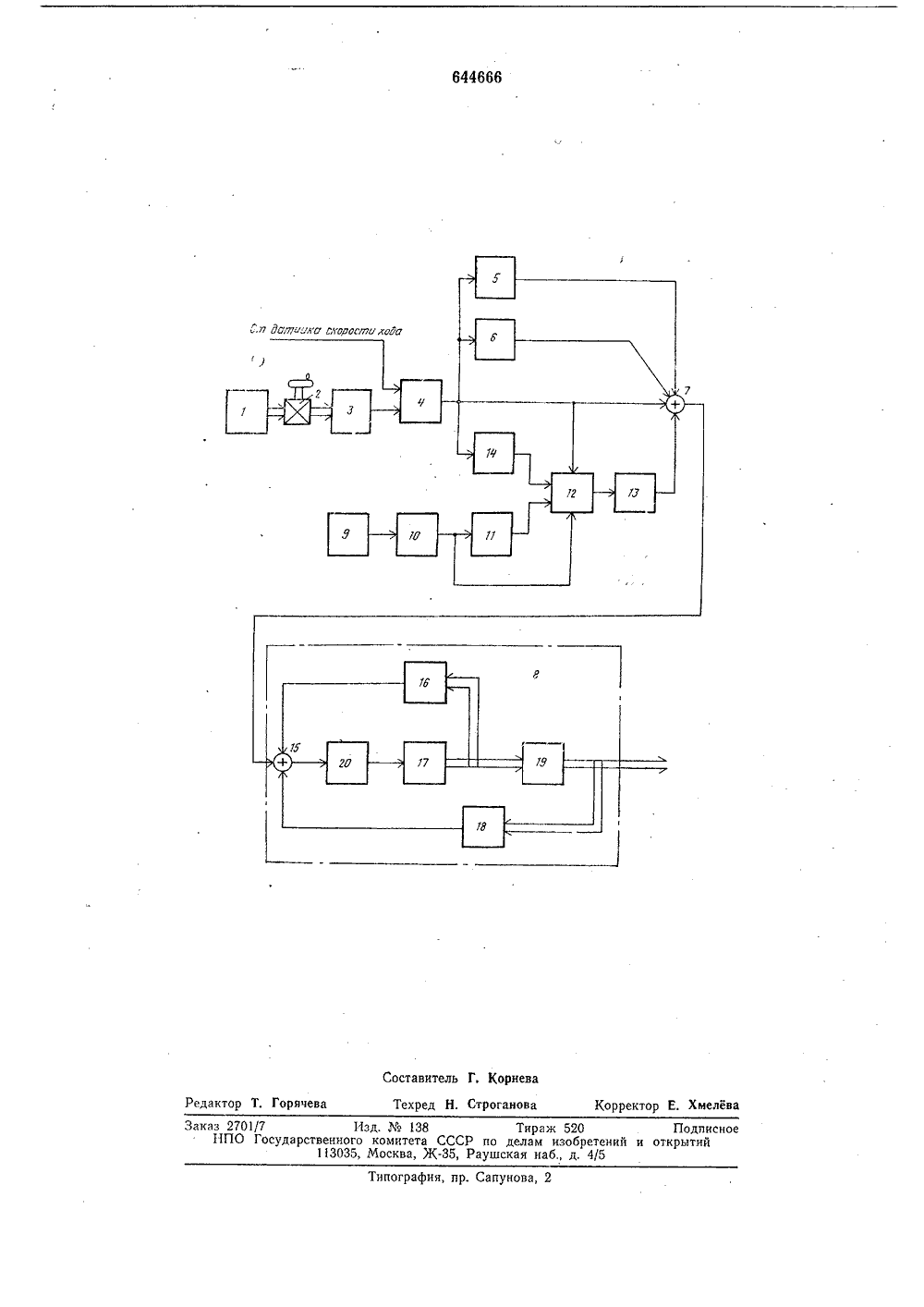
О П И С А Н И Е 11 ц 644666ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(45) Дата опубликова описания 30.01.7 2) Авторы изобретени4) СИСТЕМА УПРАВЛЕНИЯ О Изобретение относится к области судовой автоматики и в частности, к системам управления судном по курсу с обеспечением минимальной раскачки судна.Известна система управления судном, содержащая сельсин - приемник гирокомпаса, связанный через механическую передачу с датчиком курса, интегрирующий и дифференцирующий блоки, выходы которых соединены соответственно с одним и другим входами сумматора, подключенного своим выходом к следящему приводу рулевой машины 1.Недостатком известного устройства является то, что при обеспечении стабилизации судна по курсу, при больших скоростях возникает дополнительная раскачка судна, которая может привести к аварии.Целью изобретения является уменьшения раскачки судна при больших скоростях. Цель достигается тем, что система снабжена датчиком крена с преобразователем, устройствами выработки и сравнения первой и второй производных курса и крена соответственно, и подключенными к их выходам дополнительным сумматором с последовательно включенным с ним блоком выработки управляющего сигнала, подключенного своим выходом к одному из входов сумматора и фильтром, соединенным своим входом с датчиком курса, а выходом - с входами интегрирующего и дифференцирующего блоков, с третьими входами сумматоров и входом устройства выработки и сравне 5 ния первой и второй производных курса,при этом вход устройства выработки и сравнения первой и второй производных крена подключен к выходу преобразователя датчика крена, подключенному к четверто му входу дополнительного сумматора.На чертеже представлена функциональная схема устройства системы.Система состоит из сельсин-приемника 1гирокомпаса, связанного посредством меха нической передачи 2 с датчиком 3 курса,на выходе которого подключен фильтр 4, соединенный своим выходом непосредственно и через дифференцирующий 5 и интегрирующий 6 блоки с одними из выходов сум матора 7, на выходе которого подключенследящий привод 8 рулевой машины,К другому входу сумматора 7 подключены последовательно соединенные датчик 9 крена с преобразователем 10, устройство 11 25 выработки и сравнения первой и второйпроизводных крена, дополнительный сумматор 12 и блок 13 выработки управляющего сигнала. Кроме того, выход преобразователя 10 подключен к другому входу до полнительного сумматора 12 непосредственно, а к третьему входу дополнительного сумматора 12 подключсно устройство 14 выработки н сравнения первой п второй производных курса, подключенпос своим входом к выходу фильтра 4, управляющий вход которого предназначен для подключения к датчику скорости хода (на чертехке не показан).Следящий привод 8 рулевой машины включает в себя суммирующий блок 15, 10 включенный на его входе и соединенный своими входами с сумматором 7, датчиком 16 насоса, которым снабжен исполнительный механизм 17, и датчиком 18 обратной связи, которым снабжена рулевая маши на 19. Выход суммирующего блока 15 подключен к исполнительному механизму 17 через усилитель 20.Система работает следующим образом, Сельсин-приемник в гирокомпасе при от клонении судна от курса через механическую передачу 2 разворачивает датчик 3 курса. Сигналы датчика 3 п датчика скорости хода поступают на первый и второй входы фильтра 4 соответственно, в котором 25 происходит выделение частоты собственных колебаний судна, зависящей от скорости хода. Выход фильтра 4 электрически связан с блоками 5 и 6 устройством 14 и первым входом дополнительного сумматора 12. 30 При крене судна датчик 9 крена вырабатывает сигнал, который, поступает на вход преобразователя 10, выход которого соединен с входом устройства 11 и вторым входом дополнительного сумматора 12, 35В устройствах 11 и 14 происходит выработка первой и второй производных го крену и курсу соответственно, а также сравнение знаков первой и второй производных, В дополнительном сумматоре 12 в зависп мости от сигналов, поступающих из устройств 11 и 14, происходит сравнение сигналов, поступающих через фильтр 4 от датчика 3 курса и от преобразователя 10 угла и крепа, и выбор результирующего сигнала, 45 Результирующий сигнал с дополнительного сумматора 12 поступает на вход блока 13 выработки управляющего сигнала и с его выхода на сумматор 7, куда также поступают сигналы с выхода дифферепцирующего 5 и интегрирующего 6 блоков, Суммарный сигнал с датчика 3 курса дифференцирующего 5 и интегрирующего 6 блоков и блока 13 поступает па вход усилителя 20 через суммирующий блок 15, а с его выхода - на исполнительный механизм 17, который воздействует на управляющий орган рулевой машины 19. Рулевая машина 19 разворачивает руль в нужном направлении до тех пор, пока напряжение датчика 16 насоса и датчика 18 обратной связи не будетравно входному напряжению усилителя 20,Формула изобретенияСистема управления судном, содержащая сельсин-приемник гирокомпаса, связанный через механическую передачу с датчиком курса, интегрирующий и дифференцирующий блоки, выходы которых соединены соответственно с одним и другим входами сумматора, подключенного своим выходом к следящему приводу рулевой машины, отл и ч а ю щ а я с я тем, что, с целью уменьшения раскачки судна при больших скоростях, опа снабжена датчиком крена с преобразователем, устройствами выработки и сравнения первой и второй производных курса и крена соответственно, подключенным к их выходам дополнительным сумматором с последовательно включенным с ним блоком выработки управляющего сигнала, подключенного своим выходом к одному из входов сумматора, и фильтром, соединенным своим входом с датчиком курса, а выходом - С входами интегрирующего и дифференцирующего блоков и с третьими входами сумматоров, а водом устройства выработки и сравнения первой и второй производных крена, подключен к выходу преобразователя датчика крена, подключенному к четвертому входу дополнительного сумматора,Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР Мо 984356, кл. В 63 Н 25/04, 1967,Составитель Г. Корневаактор Т. Горячева Техред Н, Строганова Корректор Е, ХмелеваЗаказ 2701/7 Изд Ме 138 Тираж 520 ПодписноеНПО Государственного комитета СССР по делам изобретений и открытий113035, Москва, Ж, Раушская наб., д, 4/5Типография, пр. Сапунова
СмотретьЗаявка
2479757, 19.04.1977
ПРЕДПРИЯТИЕ ПЯ Г-4152
МОРДОВЧЕНКО ДМИТРИЙ НИКОЛАЕВИЧ, КАТЫШЕВА НАТАЛИЯ СЕМЕНОВНА
МПК / Метки
МПК: B63H 25/04
Метки: судном
Опубликовано: 30.01.1979
Код ссылки
<a href="https://patents.su/3-644666-sistema-upravleniya-sudnom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления судном</a>
Устройство для определения гистограммы первой производной сигнала

Номер патента: 439818
Опубликовано: 15.08.1974
МПК: G06F 17/18
Метки: гистограммы, первой, производной, сигнала
...сигнала Р(о+Л 1) как существенное для следующего цикла анализа, а вычитающий счетчик 28 - код длительности окончившегося инЛЯтервала дискретизации . По связи 12ЛЯмин. блок АВД выдает импульс, означающий конец текущего интервала дискретизации. После этого блок АВД начинает следующий цикл анализа, осуществляя слежение в моменты времени 1 - 1 О=М+ЛЬ, , Л 1+сЛ 1 м 1 н за вторым из неравенств (3), а измеритель 27 измеряет текущее значение нового интервала дискретизации Л 1=сЛЬ . При выполнении этого неравенства в блоке АВД запоминается Г(Ы 1+Ы), в вычитающем счетчике 28 - кодЛ 12, вновь появляется импульс в связи Л 1 12 ит. д.В момент прихода импульса по связи 12 кодовый селектор 2 проводит сравнение кода, поступающего в этот момент по связи...
Устройство для получения первой производной

Номер патента: 128156
Опубликовано: 01.01.1960
Автор: Карпов
МПК: G06G 7/18
Метки: первой, производной
...Л 1, молелирук- н(нх некоторук физическую величину, подает:я на входной блок 1, яв- ,15 юн(нйс 51 усилителем, собранным на т)Иоле. Из блОкс 1 последоватс,ьность импульсов подался на блок задержки 2, вь(полненнь(й 1 и тролс НО схеме ждущего )1 у;1 ьтивибратора с катоднои связью, и с н.ГО - н 1 вход импульсного вычитаю(цего блока .3. Одповремен(о импульсы нз блокаполаотся на блок 3 непо,"редствснно. Таким образом, получается последовательность импульсов Л 1, частота повторения которых изменяется в соответствии с изменениями моделируемой физической величины, и вторая последовательность У, подобная Л, по закону изме- пения частогы повторения,но сдвинутая во времени на величину Л 1, раину(о длительности импульсов, генерируемых...
Устройство для определения знака первой производной огибающей переменного напряжения

Номер патента: 243274
Опубликовано: 01.01.1969
Автор: Иване
МПК: G06G 7/184
Метки: знака, огибающей, первой, переменного, производной
...максимуме амплитуды отрицательного полупериода. В качестве синхронного детектора использован транзистор 3, которым управляет формирователь 4 импульса перезаряда, запускаемый строб-импульсом через блок задержки б. Последовательно с запоминающим конденсатором б включен резистор 7, 10 на который подается напряжение строб-импульса. Элементом, сравнивающим напряже.ния, является диод 8, подключенный одним концом к конденсатору б. На второй конец диода через резистор 9 подано переменное на пряжение от входа 1. Выход схемы сравнениячерез конденсатор 10 подключен к одновибратору П, формирующему стандартный расширенный по сравнению со строб-импульсом выходной импульс. Этот импульс поступает на 20 логическую схему 12, на второй вход...
Устройство для определения знака первой производной

Номер патента: 429430
Опубликовано: 25.05.1974
Авторы: Профзаболеваний, Рубин, Свердловский
МПК: G06G 7/184
Метки: знака, первой, производной
...следующим образом, Аналоговый сигнал через входнои зажимподается на широтно-импульсный модулятор 1, генерирующий импульсы прямоугольной формы, изменения длительности которых соответствуют изменениям входного аналогового сигнала. На выходе генератора пплоо разного напряжения 2 образуются нмгульсы пилообразной формы с амплитудами, пропорциональными дпительности импульсов широтно-импульсного модулятора 1. Переключатель :1 на,"вз положения попеременно соединяет с генератором пилообразного напряжения лиоо запоминающий конденсатор 4, либо запоминающий конденсатор 5 на время между задним фронтом одного н задним фронтом следующего за ним импульса. Разрядный ключ б замыкает на общую шину выход генератора пилообразного напряжения 2 на время...
Устройство для определения знака первой производной

Номер патента: 611219
Опубликовано: 15.06.1978
Авторы: Веселый, Козлова, Нестеренко, Попов, Сидоренко
МПК: G06G 7/18
Метки: знака, первой, производной
...Филиал ППП "Пагснт"; г. Ужгороц, ул. Проскакал, 4 В исходном положении тригге 1. 7 и счетчики 5 и 6 находятся в нулевом состоянии, Входной сигнал подается на вход широтно-импульсного моду. лятора 1, генерирунхцего импульсы прямоугольной формы, изменения длительности которых соответствуют изменениям амплитуды входного аналого. вого сигнала.Первый цтиротно-модулированный импульс и нулевое состояние триггера 7 разрешают прохождение через элемент И 4 импульсов опорной часто ты с выхода генератора 2 на вход счетчика 5, в котором записывается код, пропорциональный длительности первого широтно-модулированного импульса. Задним фронтом широтно-модулированного импульса триггер 7 перебрасывается в единичное состояние, которое вместе со вторыч...
Предыдущий патент: Ударостойкое электроизоляционное покрытие водолазного металлического шлема
Следующий патент: Канал подруливающего устройства для многокорпусного судна
Случайный патент: Контактное устройство для тепломассообменных и химических процессов