Способ управления синхронным двигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 604112
Авторы: Бродовский, Жилин, Иванов



Текст
) Приоритет Гасударственный комитет Совета Министров СССР оо делам нзооретений н открытийаио 25 04 78 Бюлл 15 публ бликования описания Я .11, Ы,(45) Дат(54) СПОСОБ УПРАВЛЕНИЯ СИНХРОННЬ БВИГАТЕЛЕх 1 1Изобретение относится к области регулируемого электропривода переменного тока и предназначается для управления скоростью нагрузки с помошью синхронного двигателя.Известен способ частотного регулирования скорости синхронных двигателей без обратной 5 связи по положению ротора 1.Этот способ не обеспечивает быстродействия из-за опасности выпадания двигателя из синхронизма.Известен способ регулирования с использованием вентильного двигателя двойного питателя, что требует дополнительного преобразователя токов ротора 2.Известен также способ управления синхронным двигателем путем преобразования составЪляюших тока статора с помощью.гармонических функций и формирования сигналов управления для регуляторов токов статора и ротора по сигналам задания, например, сигналам скорости и потока возбуждения. Определение требуемых гармонических функций ведется по о 0 результатам измерения углового положения ротора 3. Недостатком способа является сложность го реализации, обус, говленная необходиостью измерения углового положения ротора синхронной машины для формирования гармонических функций.Целью изобретения является упрощение реализации способа.Это достигается тем, что сначала устанавливают требуемые сигналы задания, например, сигналы задания скорости и потока возбуждения, затем подают сигнал управления на рЕгулятор продольного тока ротора и с этого момента времени измеряют и интегрируют напряжения ориентации обмоток статора. По результатам интегрирования формируют упомянутые гармонические функции, после чего подают сигналы управления на регуляторы составляющих тока статора и поперечного тока ротора.Способ предусматривает определенную последовательность включения сигналов задания и сигналов управления с интегрированием напряжений в обмотках статора, наводимых в момент задания продольного тока (потока возбуждения) ротора. Результаты интегрирования напряжений фаз статора используют для определения начальных значений гармонических функций, характеризуюших угловое положение продольной оси ротора. Получив указанные гармонические функции, подают сигналы управления на регуляторы составляющих тока статора и поперечного тока ротора. После подачц сигналов управления возникает электромагнитный мочент двигателя, цод дейтвцем которого ротор двигателя раскручивается до яд;анной скорости. Так как ротор вращается, 1 о в обмотках статора образуются напряжения (ЭДС) частоты, определяемой скоростью вращения ротора. Эти напряжения интегрируют ц по результатам интегрирования формируют тре буемые гармонические функции, Таким ооразом управление синхронным двигателем можно вести оез измерения углового положения его ротора. На практике применения предлагаемого способа ограничено задачами, в которых скорость нагрузки не бывает длительно равна нулк.Объясняется это несовершенством существуюющи интеграторов. В этих случаях, когда скорость нагрузки может принимать нулевое значение на длительное время, неосгодимо перед началом регулирования скорости произвести включение привода в соответствии с предлагаемым способом.На чертеже изображена структурная схема электропривола, построенц го в соответствии с предлагаемым способом, Она содержит синронцый двигатель 1, датчики токов статора 2, датчики напряжений статора 3, преобразователь частоты статора 4, датчики токов ротора 5, регулятор токов ротора 6, формирователь гармонических функций 7, блок кочмутдции 8, формирователь и;гпряжений ориентации 9, блок интсгпаторов О, векторный анализатор 11, блок прям го преобразования 12.Узлы 8 и 9 введены в электропривод для получения сигналов, с помоцью которыформируются гармонические функции в узле 7.Привод, показанный на чертеже, используют для регулирования скорости. В этом случае сигналы задания привода 110 и 11 являются выходными сигналами вычислительного устройства, ца вод которого поступает цгнал с выхода регулятора скорости.Электропривол работает следующим образом.После включения питания устяцавлпвагот сгггнсглы залаия Иа цС помоцгио олока коммутации 8 подают сигнал Е ца б.гок 6, который создает ток в продольной оомоткс ротора. Таким образом возццкде возбуждение машицы по продольной ц и цзыенясгся потокосцеплецие обмоток тяора, вслелствце чего в них наводятся ндпряжеггця. Эи цап)гяжения ггсгстпяо в блок 9 и затем в блок интеграторов 10, на выходякоторого с помощью блока 1 образуется пара напряжений, неободцмая для формирования гармонических функций.Госле образования гармоническифункций в блоке 7 с помо;цью блока коммутации 8 подают сигналы 0 и 13 на блоки 6 и 12.Ня практике трудно получить идеальные интеграторы, поэтом :роль игряюг ггггерцсг 5 лические звенья с мсихгяльно ьозможцой постояццой времени, например, с 0,5- 20 ек в зависимости о поставленной требус чой задачи. Поскольку такие яперггодцчекцс звенья це могут длительно хранить информацию приволцых сигналах, равнынулю, ц производятинтегрирование при частотах, меньших 0,5 -1 Гц, со зцачгггельцыми погрешностями, то5необходимо сигнал задания по скорости выбирать прц включении и в процессе работы привода соответствующей величины. Поэтому при.вод предназначается в некотором диапазонескоростей, исключающем зону нулевых скоростей, соответствуюгцих частотам токов ст гтоГг,0 Рд 0,0 1 ГцПри этом возможна работа приводя присигналах задания скорости обоих знаков снепрерывным реверсом,Формирователь напряжений ориецтации 9формирует напряжения в зависимости от выбг раиной системы ориентации синхроццо вращдюшейся системы координат. Он может формировать, например, напряжения, соответствуюднепотокосцеплению обмоток статора, или потокув воздушноч зазоре машины. Д,гя полученияцацряжений ориентации можно использоватьспециальные измерительные обмотки статораилц выделять эти напряжения из фазных напряжений двигателя, используя информацию о токах статора.Привод более прост по сравнению с извест 25 ными приводами, решагошими те же задачи,тяк как в нем отсутствует электромеханический датчик положения для формирования гармонических функций.30Фор ггу,га изобретена чСпособ управления синхронным двигателемс электрочагнитным возбуждением, создаваемым двухфазной обмоткой нд роторе путеч прсобразования составляющих тока стдторяючощью гармонических функций и формирования сигналов управления для регулягоровтоков статора и ротора по сигналам задания, например, сцгнгам скорости и потока возбуждения, с последовательныч включением сигнд лов задания и подачей сигналов управления цдрегулятор продольного тока ротора, ог.гииагоигиггся тем, что, с целью упрощения его реа;шздцци, с момента подачи сигналов управления ца регулятор продольного тока ротора измеряют и интегрируют напряжения ориентации обмоток статора, цо результатам интегрирования формируют упомянутые гармоничсскце функции и подают сигналы управления ндг-регутгяторы тока статора и поперечного ток; ротора.Источники информации, принятые во вцима нце црц экспертизе:311,амулхацов М. 3. и др. Чдстотцос рсгу.гировдцце скорости электропрцволов переменного тока. Узб. ССР. Г 1 зд-во ФАИ, с. 148- - 203.2. Г 1 дтецт СИЛ Ло 3686548, кл. 318 - 138,1972.3. . Перевод ст. Байера Х. из журналагегтгеп, Лсгв 1 з г 1. 1971, т. 45, Ло 10, с. 765 - 768, перевод Ц 6664, 1971. . 8.
СмотретьЗаявка
2127198, 22.04.1975
ПРЕДПРИЯТИЕ ПЯ В-8670
БРОДОВСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, ИВАНОВ ЕВГЕНИЙ СЕРАФИМОВИЧ, ЖИЛИН АНАТОЛИЙ СЕМЕНОВИЧ
МПК / Метки
МПК: H02P 5/34
Метки: двигателем, синхронным
Опубликовано: 25.04.1978
Код ссылки
<a href="https://patents.su/3-604112-sposob-upravleniya-sinkhronnym-dvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления синхронным двигателем</a>
Генератор гармонических сигналов

Номер патента: 1626379
Опубликовано: 07.02.1991
Авторы: Григорьян, Егоров, Федорченко
МПК: H03L 5/00
Метки: гармонических, генератор, сигналов
...чтобы заполнились все разряды первого РПП 14(фиг, Зи,к). В итоге сформируются напряжения О, и Ор 1, имеющие видП1,г - ЕгОК=ОгпКцап 2 , (9)г=1 25 10 15 20 25 30 35 40 45 50 55 при достаточно большом значении и этой погрешностью можно пренебречь, то для этапа калибровки можно записатьЙр 1 Йр 2 п, (11) (Ооп-Ооб) Кацп (Смакс Смин) Кцап 1 Кацп (12)Из выражения (12) видно, что разность между максимальным и минимальным значениями гармонического сигнала, формируемого откалиброванным первым ЦАП 4, равна значению постоянного опорного на.пряжения ИОН 21.На втором этапе работы генератора гармонических сигналов производится калибровка преобразователя 7 напряжения. Для этого в первом тахте первый и второй коммутаторы 6 и 8 переключаются таким образом,...
Генератор гармонических сигналов
Номер патента: 1596428
Опубликовано: 30.09.1990
Автор: Шутов
МПК: H03B 19/00
Метки: гармонических, генератор, сигналов
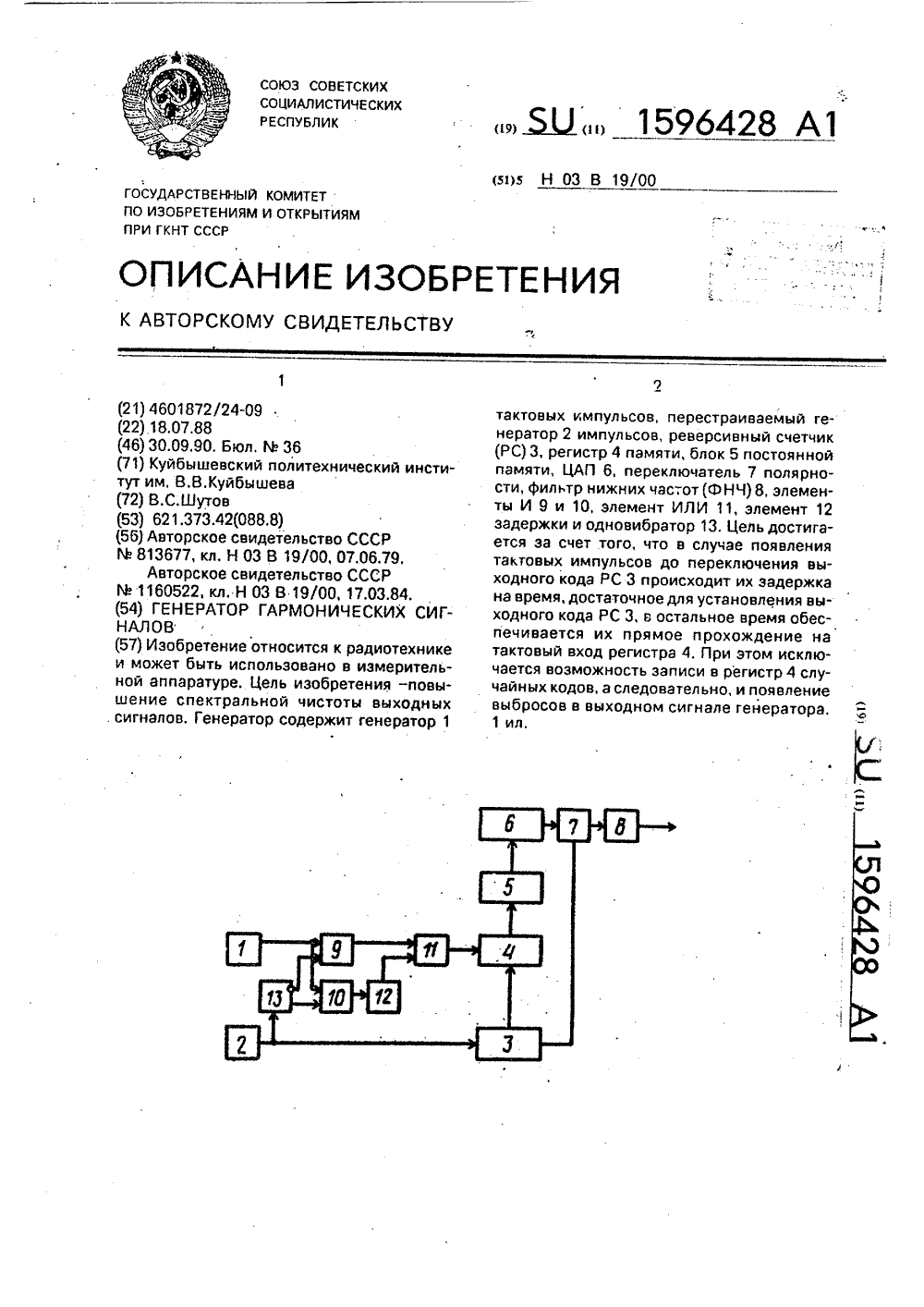
...гармонических сигналов работает следующим образом,Импульсы с выхода ПГ 2 поступают на вход реверсивного счетчика 3, состояние которога изменяется по заднему фронту импульсов ПГ 2, и одновременна своим передним фронтом запускают одновибратар 13; Таким образом, одновибратор 13 формирует на выходе импульс с длительностью больше интервала времени, необходимого для переключения выходных сигналов РС 3, с опережением по времени момента переключения на время длительности импульсов ПГ 2. На время действия выходного импульса однавибратора 13, сигнал с его инверсного выхода запрещает прохождение импульса от ГТИ 1 через второй элемент И 9, а сигнал с выхода аднавибратора 13 разрешает прохождение тактового импульса через первый элемент И 10 и...
Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором

Номер патента: 1067583
Опубликовано: 15.01.1984
Авторы: Бродовский, Иванов, Туровский
МПК: H02P 7/42
Метки: асинхронного, вала, вращения, гармонических, двигателя, ротором, сигналов, фазным, частоты
...асинхронного двигателя с фазным ротором, включенного в состав управляемого электропривода; 60 йа фиг.2 - электрическая схема фазы формирователя приращений опорный сигналов,; на фиг.3 - временная диаг.- рамма его работы; на фиг.4 - электрическая схема фазы блока памяти; , 65 на фиг.5 - временная диаграмма его работы, на фиг.б - схема размещения обмоток двухфазного асинхронного двигателя с фазным ротором.устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором содержит Датчики Фазных токов статора 1 (фиг.1) и датчики фазных параметров ротора 2,. связанные с входами формирователя гармонических сигналов 3, фазные выходы которого образуют фазные .выходы устройства. В устройство введены...
Фотоэлектрическое устройство для умножения электрических сигналов на гармонические функции

Номер патента: 661571
Опубликовано: 05.05.1979
Авторы: Котолевский, Лукашенок, Ревзин
МПК: G06G 9/00
Метки: гармонические, сигналов, умножения, фотоэлектрическое, функции, электрических
...(Фиг, 2) частей, Для упрощения описания конструкция поясняется на примере двухканального устройства с порядковыми номерами гармоник И=1,2 и 3Увеличение числа каналов умножения и порядкового номера гармонической зависимости сопряжено лишь с увеличением числа фоторезисторов 11 и с добавлением концентричных светонепроницаемых шаблонов 16 модулирующего диска 4.На модулирующем диске 4 (Фиг.3) размещены 2 х К х р 1 концентричные светонепроницаемые шаблоны (где К в . число пар Фоторезистивных множительных мостов, а а - число гармо. - ник), в виде замкнутых овалов, определяющие гармонические функции гармоники требуемого порядка, построЕнные в полярных координатах относи" тельно начальных окружностей, распО ложенных соосно с осью вращения...
Генератор гармонических сигналов
Номер патента: 1037282
Опубликовано: 23.08.1983
Авторы: Долгодров, Кабанов, Петушков, Фомичев
МПК: G06G 7/22
Метки: гармонических, генератор, сигналов
...к управляющему входу пятого ключа, выход которого является выходом гене-. ратора гармонических сигналов, а сигнальные входы соединены соответственно с выходом цифроаналогового преобразователя и с шиной нулевого потенциала, причем второй, третий и четвертый ключ подключены сигнальными входами к шине опорного напряжения.На чертеже изображена блок-схема генератора гармонических сигналов.Генератор содержит тактовый генератор 1, счетчик 2, постоянное запоминающее устройство 3, цифроаналоговый преобразователь 4, шину 5 опорно. го напряжения, ключи 6 -10,триггер 11, регистр 12 блок 13 сравнения кодов,.первый 14 и второй 15 элемент ИЛИ, первый 16 и второй 17 элемен ты И.Выход тактового генератора 1 соединен с сигнальным входом первого ключа...
Предыдущий патент: Устройство для управления многофазным тиристорным прерывателем постоянного тока
Следующий патент: Устройство для регулирования возбуждения синхронного двигателя
Случайный патент: Способ вибрационной прокатки