Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 600456
Автор: Гриневич



Текст
и.) 6 ОО 456 Союа Советских Социалистических Респуолнк(45) Дата опубликования описания 11,04.78 151) Ч. Кл,- "Ст 01 К 171 О Государственный комитет Совета Министров СССР ло делам изобретенийн открытий(72) Автор изобретения Ф. Б, Гриневич Институт электродинамики Академии Наук Украинской ССР(54) СПОСОБ УРАВНОВЕШИВАНИЯ ЦИФРОВЪХМОДУЛЯЦИОННЫХ ЭКСТРЕМАЛЪНЫХ МОСТОВПЕРЕМЕННОГО ТОКА Изобретение относится к электроизмерительной технике, Оно предназначено для применения в цифровых мостах переменного тока, измеряющих комплексные сопротивления и проводимости,Известен способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока по двум дискретно-регулируемым параметрам измерительной цепи. Уравновешивание по обоим параметрам при таком способе производят с помощью периодических импульсных регулирующих воздействий. Для формирования каждого импульса регулирующего воздействия производят пробиос скачкообразное изменение (модуляцию) регулируемого параметра от его текущего значения на один шаг дискретности в направлении регулировки 1.Недостатком известного способа является резкое уменьшение чувствительности моста по регулируемому в данный момент параметру при наличии неравновесия по другому уравновешивающему параметру. Это приводит к снижению помехоустойчивости и сходи мости прибора.Целью изобретения является повышение чувствительности и улучшение сходимости мостов. Эта цель достигается тем, что прооное скачкообразное изменение соответствующего параметра мостовой измерительной цепи осуществляют от его приращения, равного к шагам дискретности и противоположного выбранному направлению регулированияуравновешивающего параметра, к приращс 5 иию, равному 1+1 шагам дискретности и совпадающему с выбранным направлением регулирования уравновешивающего параметра,причем пробное скачкоооразиос измсисииссоответствующего параметра мостовой измерительной цепи выбирают равным величинеи, которая связана с шагом дискретности вь 1- рджсиисм п=2 й+1,На чертеже приведена у ирощсиидя со. мдмоста, иллюстрирующая реализацию иредлд 15 гдсмого способа уравновешивания.Для простоты рассмотрим цикл урдвновсшивания моста по одному параметру.Прибор содержит логические схемы 1 и 2совпадения, модулирующие элементы 3 - 7,20 триггер реверса 8, кипп-реле 9, сумматор 10,регулируемьш уравновешивающий параметр11, тактовый генератор 12, генератор питания13, мостовую измерительную цепь 14, экстремум-детсктор 15 и блок уравновешивания 16.25 Модулирующие элементы 3 и 7 осуществляют модуляционные воздействия нд +г и йшагов дискретности соответственно, а элементы 4 и 6 па -- (И+и) и ид +(21+и) шаговдискретности соответственно. ЧодулируоиишЗО элемент 5 осуществляет пулевое модуляциои 600456нос воздействие, т. е. прп его срабатывании модуляционное приращение регулируемого параметра становится равным нулю, Уравновешивапие мостовой измерительной цепи 14 осуществляется регулировкой параметра 11. Сумматор 10 суммирует воздействия от модулирующиэлементов 3 - 7 и регулируемого параметра 11. Дискретное изменение параметра 11 осущсствляется блоком уравновешивания 16. 1-1 аправление этой регулировки уравновешивающего параметра определяет триггер реверса 8. Триггер реверса 8 управляет также модулирующимн элементами 3 и 7 и логическими схемами 1 и 2, Экстремум-детектор 15 в соответствии с состоянием измеритсльпой цепи 14 формирует по модуляционным воздействиям положительные или отрицательные импульсы. Положительные импульсы поступают на триггер реверса 8 и вызывают его переброс в другое состояние, а отрицательные - а блок уравновешивания 16 и вызывают изменение регулируемого параметра 11 в направлении уравновешивания, Ритм работы моста задаст тактовый генератор 12.Уравновешивание моста по предлагаемому способу происходит следующим обр азом. Пусть триггер реверса 8 находится в состоянии, при котором регулировка параметра 11 будет осуществляться в положительном направлении (увеличение), При этом будет включен элемент 7, осуществляющий отрицательное модуляционное воздействие на - Й шагов дискретности, и будет открыта схема совпадения 2. Очередное срабатывание тактового генератора 12 вызовет запуск кипи-реле 9, которое через схему 2 включит модулирующий элемент 6, осуществляющий модуляционное воздействие на + (21+и) шагов дискретности, Следовательно, будет осуществлена модуляция от приращения - г, противоположного направлению уравновешивания, к приращению 21+и - lг=1 г+и, совпадающему с направлением уравновешивания. Если такое модуляционное воздействие вызовет уменьшение амплитуды выходного напряжения мостовой измерительной цепи 14, то экстремум-детектор 15 выдаст отрицательный импульс, который поступит па блок уравновешивания 16 и вызовет увеличение регулируемого параметра 11 па один шаг. Затем такие циклы будут повторяться до достижения равновесия по данному параметру,Если при рассмотрении модуляционных воздействий произойдет увеличение амплитуды выходного напряжения мостовой измерительной цепи 14, то экстремум-дстектор 15 выдаст положительный импульс, который опрокинет триггер реверса 8 в другое состояние. Направление регулировки уравновешивающего параметра 11 и направления модуляционны воздействий изменятся на противоположные. Теперь включится модулпрующий элемент 3, ЗО осуществлякнцпй модуляционное воздействие на +Й шагов дискретности, и откроется схе. ма совпадений 1. Прп очередном срабатывагпш тактового генератора 12 теперь кипп-реле 9 через схему совпадений 1 включит модулирующий элемсппг 4, осуществляющип модуляционное воздействие па (21+и) шагов дискретности. Следовательно, осуществится модуляция от +Й до - (1+и) шагов дискретности. Экстремум-детектор 15 выдаст отрицательный импульс на блок уравновешивания 16, и уравповсшивание прибора будет происоднть аналогично предыдущему.Модулирующий элемент 5 срабатывает при переоде на регулировку другого уравновешивающего параметра.Увеличение чувствительности при таком способе уравновешивания проис одит за счет существенного увеличения величины модуляционного воздействия, равного 2/г+г шагов дискретности, а также за счет того, что это воздействие осуществляется на болес крутом участке передаточной характеристики мостовой измерительной цепи. Максимальное значение погрешности уравновешивания при этом не превышает половины разности положи. тельного и отрицательного модуляционных воздействий. Формула изобретения Способ уравновешивания цифровых модуляционных экстремальнымостов переменного тока по двум дискретно регулируемым параметрам с помощью периодических импульсных регулирующих воздействий, при котором для формирования какдого импульса регулирующего воздействия производят пробноескачкообразное изменение соответствующегопараметра мостовой измерительной цепи споследующим приведением моста к равновесию, отличающийся тем, что, с цельюповышения чувствительности и улучшениясходимости мостов, пробное скачкообразное4 изменение соответствующего параметра мостовой измерит ельной цени осуществляютот его приращения, равного Й шагам дискретности и противоположного направлению регулирования уравновешивающего параметра, кприращению, равному юг+1 шагам дискретности и совпадающему с направлением регулирования уравновешивающегопараметра, причем пробнос скачкообразное изменение соответствующего параметра мостовой измерительной цепи выбирают равным величине и,которая связана с шагом дискретности выражением юг=2 г+1,Источники информации,принятые во внимание при экспертизе60 1. Ф, Б. Гриневич. Лвтоматические мостыпеременного тока, 1.1 овоспбирск, РИО, Сиб.отд. Л 1-1 СССР, 1964, с. 115.600456Составитель И. Бахтина Редактор Н. Коляда Техред Л, Гладкова Корректоры: Л. Денискина и Л, Брахнина ПодписноеЗаказ 267 у 9 Изд. Лов 334 Тираж 1122 ИПО Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5 Типография, пр. Сапунова, 2
СмотретьЗаявка
2074037, 11.11.1974
ИНСТИТУТ ЭЛЕКТРОДИНАМИКИ АН УКРАИНСКОЙ ССР
ГРИНЕВИЧ ФЕОДОСИЙ БОРИСОВИЧ
МПК / Метки
МПК: G01R 17/10
Метки: модуляционных, мостов, переменного, уравновешивания, цифровых, экстремальных
Опубликовано: 30.03.1978
Код ссылки
<a href="https://patents.su/3-600456-sposob-uravnoveshivaniya-cifrovykh-modulyacionnykh-ehkstremalnykh-mostov-peremennogo-toka.html" target="_blank" rel="follow" title="База патентов СССР">Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока</a>
Фазовый способ формирования регулирующих воздействий для раздельного уравновешивания компенсационно-мостовых измерительных цепей и устройство реализующее способ

Номер патента: 900193
Опубликовано: 23.01.1982
Авторы: Заморский, Прокунцев, Шаронов
МПК: G01R 17/10
Метки: воздействий, измерительных, компенсационно-мостовых, раздельного, реализующее, регулирующих, уравновешивания, фазовый, формирования, цепей
...напряжения вертого дополнительных сигналов,положительное значение которого соответствует недоутавновешенному состоянию измерительной цепи (первый16 и третий такты), а отрицательноепереуравновешенному состоянию измерительной цепи (второй и четвертый такты) по активной составлднзцейкомплексного сопротивления,1 б Недоуравновениванию измерительнойцепи по реактивной составляющей ком"плексного сопротивления соответствует несовпадение во времени первогои второго дополнительных сигналов20 (фиг. 1, строка 1) (первый и второйтакты), а переуравновешнванию - ихсовпадение (фиг. 1, строка , третийи четвертый такты),Известно, что при подключении цепей вида 81. или РС к источнику гармонического напряжения в момент времени, когда...
Амплитудно-фазовый способ формирования регулирующих воздействий для раздельного уравновешивания компенсационно мостовой измерительной цепи

Номер патента: 945804
Опубликовано: 23.07.1982
Авторы: Волков, Захарова, Прокунцев, Шаронов
МПК: G01R 17/10
Метки: амплитудно-фазовый, воздействий, измерительной, компенсационно, мостовой, раздельного, регулирующих, уравновешивания, формирования, цепи
...повеличине шестого и седьмого дополнительных сигналов соответственно,50 Формирование шестого и седьмого дополнительных сигналов позволяет получить информацию не только о направлении изменения регулируемого параметра, но и о величине недоуравновешенного (переуравновешенного) состояния компенсационно-мостовой измерительной цепи (КМИЦ), что позволяет повысить быстродействие за счет однократного включения необходимого веса образцовых элементов для каждой циФры.Предлагаемый способ позволяет повысить точность измерения составляю" 4щих, измеряемого Комплексного сопротивления за счет достижения состояния полного равновесия КМИЦ.На фиг. 1 показана компенсационно-мостовая измерительная цепь ( КМИЦ)на фиг. 2 - ветвь:КМИЦ, составленнаяиз...
Способ раздельного уравновешивания компенсационно-мостовых измерительных цепей

Номер патента: 957118
Опубликовано: 07.09.1982
Авторы: Волков, Заморский, Прокунцев, Шаронов
МПК: G01R 17/10
Метки: измерительных, компенсационно-мостовых, раздельного, уравновешивания, цепей
...составляющим комплекского сопротивления,формирование первого, второго,третьего, четвертого, пятого и шестого дополнительных сигналов позволяет увеличить точность и быстродей 8 4ствие уравновешивания компенсационно"мостовых измерительных цепей,На Фиг, 1 и 2 изображены векторные диаграммы, поясняющие процессуравновешивания измерительной цепи;на фиг. 3 - структурная схема мостапеременного тока, реализующего предлагаемый способ,На векторных диаграммах обозначено:Он - вектор напряжения небаланса;Ор- вектор напряжения, синфазного с напряжением питания измерительной цепи;О - вектор напряжения, повернутого относительно напряженияйпитания на +2О. О, - векторы напряжений векторнойразности напряжений небаланса и соответственно вектоРов...
Компенсационно-мостовое измерительное устройство

Номер патента: 957117
Опубликовано: 07.09.1982
Авторы: Волков, Заморский, Прокунцев, Шаронов
МПК: G01R 17/10
Метки: измерительное, компенсационно-мостовое
...сигнала, трансформатор 2 напряжения с обмотками 3,4 и 5, измеряемое комплексное сопротивление 6, образцовое комплексное сопротивление 7 и два трансформатора 8 и 9 тока.На векторной диаграмме совмещены векторная диаграмма напряжений и векторная диаграмма токов и обозначено:аЬ - напряжение питания контура, содержащего, например, измеряемое комплексное сопротивление;аГ - напряжение питания контура, содержащего, например, образцовое комплексное сопротивление;ав,ап - падения напряжения на активной составляющей соответственно измеряемого и образцового комплексных сопротивлений;вд,пд - падения напряжения на реактивной составляющей соответственно измеряемого и образцового комплексных сопротивлений;ас - вектор напряжения, пропорциональный току 1...
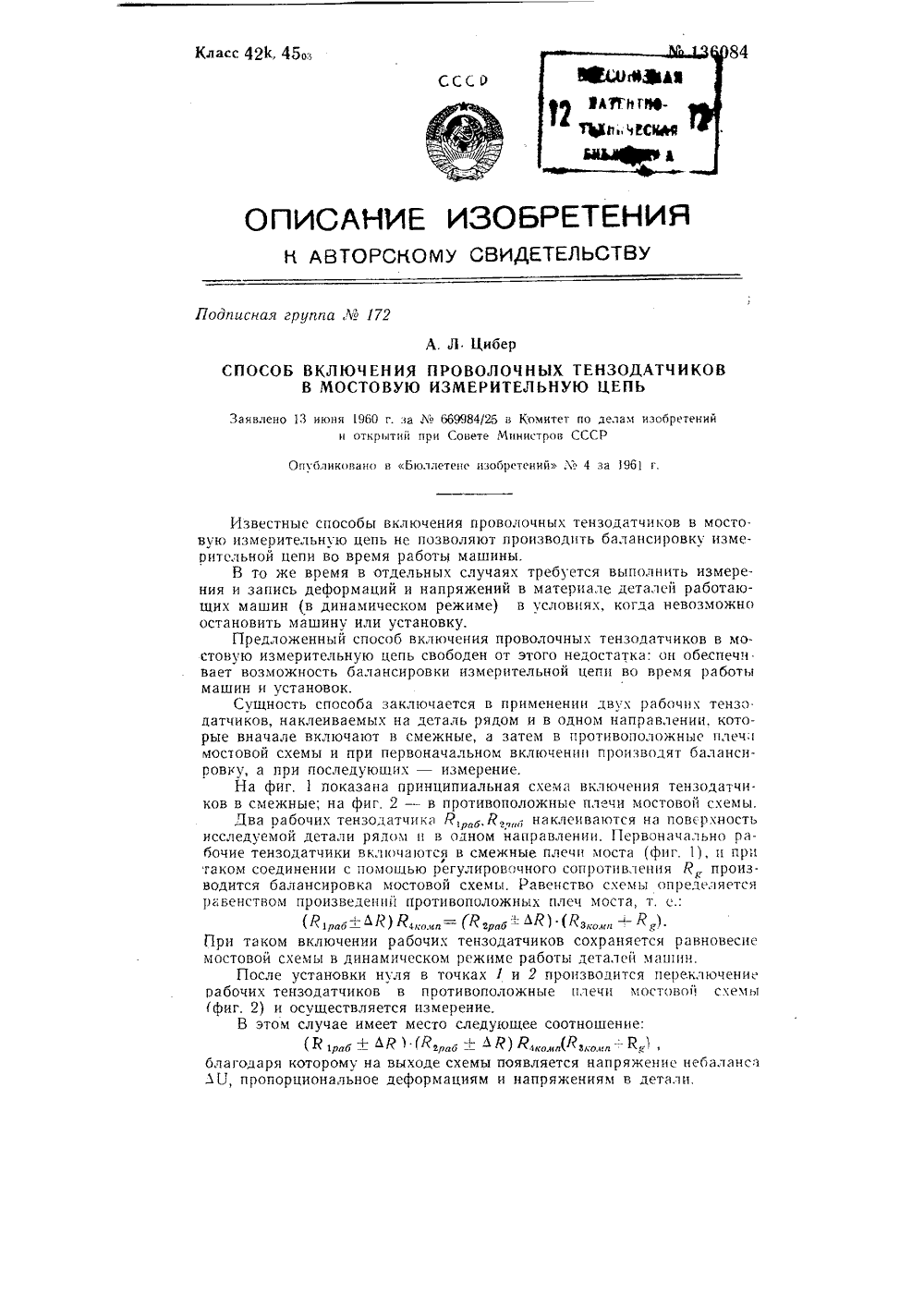
Способ включения проволочных тензодатчиков в мостовую измерительную цепь
Номер патента: 136084
Опубликовано: 01.01.1961
Автор: Цибер
Метки: включения, измерительную, мостовую, проволочных, тензодатчиков, цепь
...Р,раб,Реоб наклеиваются на поверхность исследуемой детали рядом и в одном направлении. Первоначально рабочие тензодатчики вклкчаются в смежные плечи моста (фиг, 1), и при гаком соединении с помощью регулировочного сопротивления Й производится балансировка мостовой схемы. Равенство схемы определяется равенством произведений противоположных плеч моста, т, с.:(1 раб -1) аколп Я яраб1)(1 влоли 1 д)При таком включении рабочих тензодатчиков сохраняется равновесие мостовой схемы в динамическом режиме работы деталей машин.После установки нуля в точках 1 и 2 производится переключение рабочих тензодатчиков в противоположные плечи мостовой схемы 1 фиг. 2) и осуществляется измерение.В этом случае имеет место следующее соотношени(1 раб + 1 )...
Предыдущий патент: Способ раздельного измерения составляющих комплексного сопротивления
Следующий патент: Автоматический уравновешенный четырехплечий мост
Случайный патент: Поверхностный источник сейсмических сигналов