Устройство для автоматического управления роботом манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советскнх Социалмстицвских Республик(23) ПриоритетГееуАерстееииый кеиитет Сеевте Нкииетрее СССР ее делам изееретеей н еткриткй(71) Заявитель 54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-МАНИПУЛЯТОРОМУстройство дат автоматического управлеаиа работом-манипулятором относится к робототехнике и может быть использовано при создании систем управления автоматических манипуляторов (промышленных роботов).Известны устройства автоматического управления роботами-манипуляторами. Одно из ннх содержит блок задания нрограммы, привод захвата, привод вращения руки, привод радиального хода руки, схемы сравнения,:усилителй н датчики обратной связи по положению 111, Оно имеет низкое быстродействие, Наиболее близким к нзоб ретенню техническим решением является устройство, содержашее последовательно соединенные блок задания лрограммы, первый элемент сравнения, первый усилитель, привод радиального перемешення н первый датчик обратной связи, выход которого подключен ко второму входу первого элемента сравнения, и последовательно соединенные второй усилнтегь, привод вращения, второй датчик обратной связи и второй элемент сравнения, второй вход которого подключен 1 хо второму выходу блока задания програм 1мы, третий выход которого через блокуправления сЬедннен с приводом схвата Я,Это известнсй устройство позволяет полуф чвть оптимальный по быезродействию эакоФторможения исполнительных органс манипулятсра дли некоторой номинальной полееной нагрузки при ивнбольаем радиусе пере.эноса груза при.условии получения заданной 0 точности позиционирования. Однако оио ивдиет возможности получать оптимальноебыстродействие при любых полезных нагруаках и любых радиусах переноса полезногогруза, твк квк полученный с его помо 3 закон торможения исполнительных органоманипулятора не может быть автомвтическн изменен в зависимости эт измененияуказанных параметров.Белью изобретения является оптимиза М цня быстродействия. Е описываемом устройстве это достигается тем, что оно содержит блом вычисления момента инерциивращающихся частей, входы которого совди .иены с выходом второго элемента срввне ния, со вторыми выходамн блока управленяприводом схвата и первого датчика обратной связи соответственно, а выход - совходом второго усилителя,На чертеже показана блок-схема описываемого устройства,Оно содержит блок 1 задания программы, первый элемент 2 сравнения, первыйусилитель 3, привод 4 радиального перемещения, первый датчик 5 обратной связи,второй усилитель 6, привод 7 вращения,второй датчик 8 обратной связи, второйэлемент 9 сравнения, блок 10 управпенияприводом схвата, привод 1 1 схвата и блок12 вычисления момента инерции вращающихся частей,В автоматическом цикле работы манипупятора сигнапы от блока 1 задания прсграммы и датчика 8:обратной связи посту.пают в элемент 9 сравнения, где вырабатывается управпяюший сигнал Ц . Этотсигнал поступает на вход блока 12 вычиспения момента инерции вращающихся час гей.На два других входа блока 12 поступают сигъ-,напы О 4 от блока управления 10 схватоми О от датчика 5 обратной связи. Величины этих сигналов могут быть записаныследующим образом;ЦК(гп+м ),. О 15 30 ц К п,где П - масоа переносимого объекта;.щ - масса подвижных частей манипу 9пятора, принимающих участие в35радиальном перемещении;Р - радиус, на котором переноситсяобъектК 4 и К 2- коэффициенты пропорциональности.Мчитывая, что момент инерции вращаю 40 шихся частей манипулятора может быть сосчитав по фЪрмуле 1Т 1 Р, великана еигнапа, пропорционального изменению момента инерции, имеет вид245Управляющий сигнал О уменьшается блоком 12 пропорционально величине Оя и, таким образом, окончательный сигнал управления, вырабатываемый блоком 12 должен иметь видО О 42 Кц КО О" и гУстройство работает так, что процессзамедления привода 7 вращения начинаетсяпри определенном, аднажды установленномзначении сигнала О 2, вырабатываемогоблоком 12 вычисления. Это значение достигается тем раньше и, следовательно,дальше от точки позиционирования, чембольше величина сигнала О , характеризующего изменение момента инерпии вращающихся частей манипулятора,Таким образом, оптимизируется времяпроцесса позиционирования.Применение изобретения позволяет существенно повысить производительностьавтоматических манипуляторов с программным управлением, используемым в производственных процессах путем оптимизациипереходных процессов в приводах вращатепьных координат.Формула изобретенииУстройство дпя автоматического управления роботом-манипулятором, содержащее последовательно соадиненные блок задания программы, первый элемент сравнения, первый усилитель, привод радиального перемещения и первый датчик обратной связи, выход которого подкпючен ко второму входу первого эпемента сравнения, и последовательно соединенные вгорой усилитель, привод вращении; второй датчик обратной связи и второй эпемент еравнения, второй вход которого подключен ко второму выходу бпока задания программы, третий выход которого через блок управления соединен с приводом схвата, о т и и ч а ю щ е ес я тем, что, с цепью оптимизации быстродействия устройства, оно содержит блок вычисления момента инэрции вращающихся частей, входы которого соединены с выходом второго элемента сравнения, со вторыми выходами блока управления приводом охвата и первого датчика обратной связи, соответственно, а выход - со входом второго усипитепя.Йсточники информации, принятые во вни мание при экспертизе:1, Патент США Ж 3212649, кл, 214-1, 1960.2. Патент Франции М 2034910, кл. В 259/00, 1971.Заказ 2252/11 Тираж 1122 Подлисное БНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская набд. 4/5 Филиал ППП Патентф г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
2092229, 02.01.1975
ПРЕДПРИЯТИЕ ПЯ Р-6930
СУРНИН БОРИС НИКОЛАЕВИЧ, КАЛАБИН ИГОРЬ ВИТАЛЬЕВИЧ, СТЕПАНОВ ВЛАДИМИР ПАВЛОВИЧ, БАРАНОВ АНАТОЛИЙ ГЕОРГИЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятором, роботом
Опубликовано: 15.03.1978
Код ссылки
<a href="https://patents.su/3-597552-ustrojjstvo-dlya-avtomaticheskogo-upravleniya-robotom-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для автоматического управления роботом манипулятором</a>
Устройство для приема сообщений всистемах передачи информации c реша-ющей обратной связью

Номер патента: 849517
Опубликовано: 23.07.1981
Авторы: Биглов, Бормисов, Бриденко, Лещенко, Хараев
МПК: H04L 1/16
Метки: всистемах, информации, обратной, передачи, приема, реша-ющей, связью, сообщений
...кодовой комбинации. Затем содержимое. декодера 1 сравнивается с содержимым всех блоков 5 памяти. В случае совпадения с содержимым одного из блоков 5 памяти элемент И 9 в соответствующий сумматор 10 выдает разрешающий сигнал, по которому производится добавление достоверности принятой комбинации к достоверности, записанной в сумматоре 04. В слуЧае несовпадения содержимого декодера 1 ни с одной из кодовых комбинаций, записанных в блоках 5 - 5 памяти, с элемента 3 блокировки (ИЛИ-НЕ) в третий сумматор 10 выдается сигнал, по которому из достоверности, записанной в сумматоре 1 О, вычитается достоверность, записанная в блоке 11 оценки достоверности. Если в процессе вычитания достигается нулевое значение достоверности, то оно фиксируется...
Устройство для контроля системы передачи информации с обратной связью

Номер патента: 955168
Опубликовано: 30.08.1982
Авторы: Кочешков, Сергеев, Чуриков
МПК: G08C 25/02
Метки: информации, обратной, передачи, связью, системы
...сигнала, блок сравнения, цетвертый 10 блок сигнализации, регулятор уровня сигнала и блоки визуального контро" ля, пятый и шестой выходы блока управления соединены с первыми входами соответственно первого и второго комму таторов, второй и третий входы первого коммутатора соединены соответственно с первь 1 м выходом оконечного датчика и вторым выходом оконецного приемника, выход первого коммутатора 20 соединен с первыми входами первого блока визуального контроля и блока сравнения, второй вход которого соединен с выходом датцика эталонного . сигнала, выход блока сравнения соеди нен со входом четвертого блока сигнализации, выход первого датчика конт" рольного текста соединен со вторым входом второго коммутатора, третий вход которого...
Регенератор с квантованной обратной связью

Номер патента: 1327302
Опубликовано: 30.07.1987
Автор: Сирбиладзе
МПК: H04J 3/08
Метки: квантованной, обратной, регенератор, связью
...9 первого блока 7 ком 1пенсации искажений несколько уменьшен по сравнению с порогом решения 55порогового блока 3, однако он остается также выше оптимального, Теперьпороговым блоком 9 первого блока 7 1 компенсации искажений будут регистриз 132 роваться нетолько те импульсы, которые были зарегистрированы пороговым блоком 3, но также и те импульсы, уровни которых после первой компенсации в моменты стробирования достигнут уровня порога решения порогового блока 9 первого блока 7 и, следовательно, пороговым блоком 9 первого блока 7 будет регистрироваться большее количество импульсов, чем пороговым блоком 3, однако в первом блоке 7 будет компенсироваться "хвосты" 1тех импульсов, которые были зарегистрированы только пороговым блоком 9...
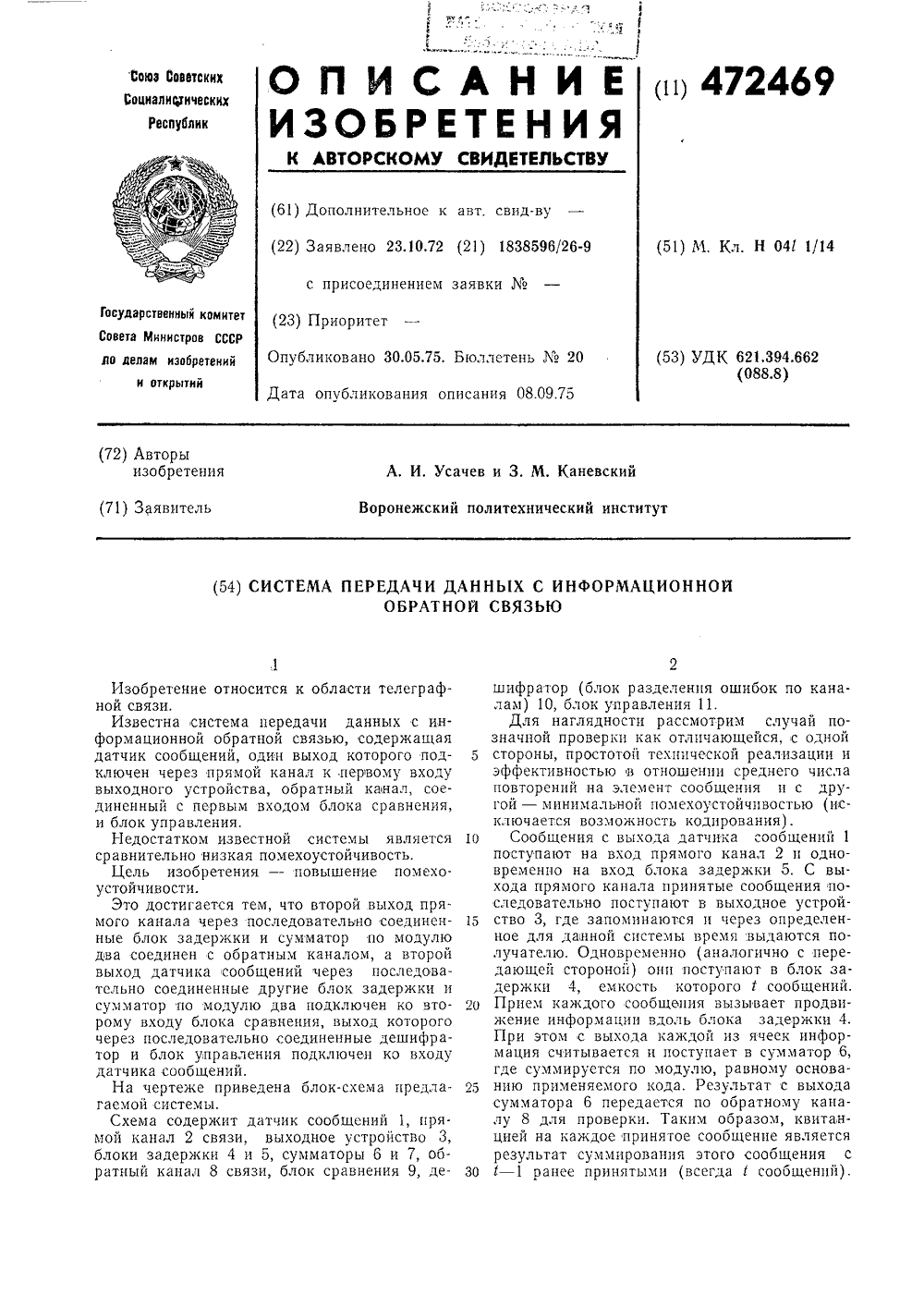
Система передачи данных с информационной обратной связью
Номер патента: 472469
Опубликовано: 30.05.1975
МПК: H04L 1/14
Метки: данных, информационной, обратной, передачи, связью
...каждой из ячеек информация считывается и поступает в сумматор 6, где суммируется по модулю, равному основанию применяемого кода, Результат с выхода сумматора 6 передается по обратному каналу 8 для проверки. Таким образом, квитанцией на каждое принятое сообщение является результат суммирования этого сообщения с- 1 ранее принятыми (всегда 1 сообщений).Иначе говоря, квитанция образуется по принципу скользящего суммирования при длине блока 1 сообщений.С выхода обратного канала сообщения поступают на вход блока сравнения 9, где сравниваются с результатом с выхода сумматора 7, сформированным по аналогичному с приемной стороной правилу из неискаженных сообщений и задержанным на время распространения сигнала по каналам связи.Импульсы ошибок...
Полосовой цепочечный фильтр с многопетлевой частотно независимой обратной связью

Номер патента: 660198
Опубликовано: 30.04.1979
Автор: Михайлов
МПК: H03H 7/02
Метки: многопетлевой, независимой, обратной, полосовой, связью, фильтр, цепочечный, частотно
...и частот полюсов, на входе фильтра, а также между звеньями фильтра включены вычитающие блоки, вторые входы которых соединены с выходом фильтра,На чертеже приведена функционал яская схема предложенного ф тсвязью содержит последовательно соединенные звенья 1 с передаточными функциями второго порядка и одинаковыми значениями добротностей и частот полюсов, на входе фильтра, а также между звеньями 1 фильтра включены вычитающие блоки 2, вторые входы которых соединены с выходом фильтра.Фильтр работает следующим образом.Сигнал обратной связи с выхода полосового цепочного фильтра с многопетлевой частотно-независимой обратной связью подается на вторые входы вычитающих блоков 2. Формирование заданной амплитудно- частотной характеристики...
Предыдущий патент: Пусковое устройство пневматической ручной машины
Следующий патент: Устройство для резания жгута нитевидного материала
Случайный патент: Способ градуировки инфразвуковых гидрофонов