Устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 583305
Авторы: Жуков, Загороднюк, Катаев



Текст
Союз СоветскинСоциалистическихреспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДВУЕЛЬСТВУГосударственный коюеге Совота Мнннотроа СССР оо долан нзооротоннй н открвннй(43) Опубликовано 05,12,77, БтоллетеР ЖЮ (4 б) Дата опубликования описания 25,12.77(72) Авторы изобретеииа В. Т. Загороднток, Ве Ае Жуков и Г. Н. Катаев(71) Заявитель Новочеркасский ордена Трудового Красного Знамени полвтекническотйинститут им. Серго Орджоникидэе(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ПОГРУЗОЧНОЙ МАШИНЫ БОКОВОГО ЗАХВАТА С ПАРНЫМИ НАГРЕБНЫМИ ЛАПАМИ 1 2Изобретение относится к горнорудной промышленности и предназначено для автоматиза- иин режима работы погрузочных машин бокового захвата с парными нагребными лапами, оснащенных регулируемыМ приводом на ходовой части.Известен регулятор производительности меха ногидравлических проходческих машин, основанный на регулировании режима работы машины, содержащий датчики нагрузки и скорости главного двигателя, задатчик скорости, регулятор скорости, блок защит, блок автоматического изменения уставки задатчика 1.Это устройство обеспечивает изменение уставки задатчика только в зависимости от параметров питающей сети, но не в зависимости тт величины возмущающих воздействий.Известно также устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами, содержащее датчик нагрузки, задаю. щий блок, элемент сравнения, регулятор скорости подачи, блок защит и реверса, выход которого подклкчен к регулятору скорости подачи, ходовую часть с регулируемым приводом, исполнительный орган погрузочной машины и его привод 21. Недостатком указанного устройства является субъективное задание тормозного момента, не 1 днозначность скорости подачи машины от возмущающих воздействий.С целью снижения динамических нагрузокна привод исполнительного органа предлагаемое устройство снабжено экстремальным регу.лятором, датчиком скорости подачи, линейным функциональным преобразователем, блоком щ вычисления абсолютной величины, генераторомтактовых импульсов и схемой вычитания, суммирующий вход которой подключен к выходу датчика нагрузки, вычитающий вход через линейный функциональный преобразователь подключен к выходу датчика скорости подачи, а выход схемы вычитания через блок вычисления абсолютной величины соединен с первым входом экстремального регулятора и входом генератора тактовых импульсов, соединенного с вторым входом экстремального регулятора, подключенного через задающий блок к одному входу элемента сравнения, к другому входу которого подключен выход датчика скорости подачи. Выход элемента сравнения соединен с регулятором скорости подачи. Кроме того, в устройстве выходы датчика нагрузки, элемента 25 сравнения и датчика скорости подачи ппдклечеиы на соответствующие входы блока защит и реверса.На чертеже изображена блск-схема описы.ваемого устройства.Устройство состоит из регулятора 1 скорости.подачи, датчиков 2, 3 нагрузки (тока) и скорости подачи соответственно, блока 4 защит и реверса машины, элемента 5 сравнения, схемы 6 вычитания, блока 7 вычисления абсолют.ной величины, линейного функционального пре.образователя 8, эстремального регулятора 9 г двумя входами, генератора 10 тактовых импульсов и задающего блока 11. Погрузочная . машина состоит из ходовой части с регулируемым приводом 12, исполнительного органа 13 и его привода 14.Устройство работает следующим образом.Сигнал датчика 3 скорости подачи подаетсяна элемент 5 сравнения, линейный функциональный преобразователь 8. Со схемы 6 вычитания снимается разностный сигнал, сформированный датчи ом нагрузки (тока) 2 и линейным функциональным преобразователем 8. Эта раз; ность в блоке 7 вычисления абсолютной величины берется по абсолютной величине и подается на первый вход экстремального регулятора 9, В зависимости от скорости подачи машины нв штабель следует, что датчик 2 нагрузки выдает монотонно возрастающий сигнал, а линейный функциональный преобразователь 8 - монотонно убывающий сигнал. На первый вход экстремального регулятора 9 поступает значение функции, имеющей явно выраженный экстремум по скорости подачи машины на штабель, причем экстремум соответствует точке пересечения монотонно возрастающей и убывающей функций. Экстремальный регулятор 9 отыски. вает эту точку минимума. Переменный шаг движения экстремального регулятора 9 задается по второму входу генератором 10 тактовых импульсов и его величина зависит от крутизны экстремальной функции. Точке минимума экстремальной функции соответствует оптимальная величина скорости подачи машины на штабель. Задающий блок 11 вырабатывает задающее воздействие регулятора 1 скорости подачи, поступающее на элемент 5 сравнения. Регулируемый привод 12 ходовой части отрабатывает оптимальное значение скорости подачи исполнительного органа 13 погрузочной машины на . штабель.При изменении свойств штабеля и ногружа.емогс материала сигнал с датчика нагрузки (тока) 2 изменится, В этих случаях контур оптимизации определит новое оптимальное значение скорости подачи, которое отработает регулятор 1. Таким образом, непрерывно происходят процессы перестройки режима работы погрузочной машины в соответствии с определеннцм аппаратурно оптимальным задающим воз.действием, которое учитывает реальные нагруз ки на приводе 4 исполнительного органа.Блок защит и реверса 4 обеспечивает кратковременный останов привода 12 ходовой части в режиме заштыбовкн исполнительного органа 13 (нагрузка на приводе 14 предельно допустимая, а скорость подачи близка к нулю) и его реверс, если процесс саморасштыбовки не произойдет.Формула изобретения1. Устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами, содержащее датчик нагрузки, задающий блок элемент сравнения, регулятор скорости подачи блок защит и реверса, выход которого подключен к регулятору скорости подачи, ходовую часть с регулируемым приводом, исполнительный орган погрузочной машины и его привод, отличающееся тем, что, с целью снижеийя ди.намических нагрузок на привод исполнительного органа, оно снабжено экстремальным регулятором, датчиком скорости подачи, линейным функциональным преобразователем, блоком вычисления абсолютной величины, генератором тактовых импульсов и схемой вычитания, суммирующий вход которой подключен к выходу датчика нагрузки, вычитающий вход через ли нейный функциональный преобразователь подключен к выходу датчика скорости подачи, а выход схемы вычитания через блок вычисления абсолютной величины соединен с первьм входом экстремального регулятора я входом генератора тактовых импульсов, соединенного с вторым входом экстремального регулятора, подключенного через задающий блок к одному входу элемента сравнения, к другому входу которого подключен выход датчика скорости подачи, причем выход элемента сравнения соединен с регулятором скорости подачи.2. Устройство по п. 1, отличающееся тем, чтовыходы датчика нагрузки, элемента сравнения и датчика скорости подачи подключены на соот.ветствующие входы блока защит и реверса.45 Источники информации, принятые во внимание при экспертизе:1, Авторское свидетельство,% 231487, кл,Е 21 С 33/00, 1963,2, Водяник Г. М. и др, Погрузочная машина50 бокового захвата с регулируемым режимом ра.боты, Известия Северо-Кавказского научногоцентра Высшей школы (серня технических наук), Ростовский университет, Ростов-на-Дону,1973, % 1, с. 28-31.Составитель М. Смнтт Текред О. Луговая Реда Подиисноета МнннсткрмтнАнаб д,аз а а СССР тета Сове ни Я и от Раушская Ужгород,Проектная,нал И, Бродски И 7 ЦНИИП Тираж 77Государственного комно дедам нвобретеЗОЗЬ, Москва, Ж 3,ППП еПатентэ, г. орректор Л. Ммьничеико
СмотретьЗаявка
2159641, 23.07.1975
НОВОЧЕРКАССКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. С. ОРДЖОНИКИДЗЕ
ЗАГОРОДНЮК ВИТОЛЬД ТРОФИМОВИЧ, ЖУКОВ ВИКТОР АЛЕКСЕЕВИЧ, КАТАЕВ ГЕОРГИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: E21C 35/24
Метки: бокового, захвата, лапами, нагребными, парными, погрузочной, работы, режима
Опубликовано: 05.12.1977
Код ссылки
<a href="https://patents.su/3-583305-ustrojjstvo-avtomaticheskogo-regulirovaniya-rezhima-raboty-pogruzochnojj-mashiny-bokovogo-zakhvata-s-parnymi-nagrebnymi-lapami.html" target="_blank" rel="follow" title="База патентов СССР">Устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами</a>
Система позиционирования с двухзонным регулированием скорости электропривода

Номер патента: 1798765
Опубликовано: 28.02.1993
МПК: G05B 19/18
Метки: двухзонным, позиционирования, регулированием, скорости, электропривода
...тз заданной скорости, отрабатываемого цифровым контуром регу лирования скорости, при этом количествоимпульсов частоты Ь соответствует заданной величине перемещения. В случае превышения скоростью двигателя номинального значения блоком 11 осуществляется 45 снижение тока возбуждения с тем, чтобыобеспечить постоянство ЭДС во второй зоне регулирования.В конце цикла отработки заданного перемещения при 1 з = 0 контроль отработки 50 осуществляется цифровым контуром положения. При наличии ошибки в позиционировании (например, из-за инерционности контура регулирования Скорости или из-за наличия статической нагрузки) на вход ин тегратора 7 через блок 5 поступают импульсы Ь, Код на входе интегратора, а следовательно, и сигнал Оз на выходе...
Устройство для управления тяговыми двигателями транспортного средства

Номер патента: 1402453
Опубликовано: 15.06.1988
Авторы: Винс, Зорин, Львов, Пестряков
МПК: B60L 15/20
Метки: двигателями, средства, транспортного, тяговыми
...В свою очередь максимальноезначение выходного сигнала блока 42выбирается из условия снижения токовой нагрузки тягового двигателя 6до величины, при которой избыточноескольжение (боксование) невозможнодаже при резком изменении нагрузки(коэффициента сцепления). При этомвыходной сигнал датчика 22 тока якоря тягового двигателя 6 становитсяравным по величине выходному сигналузадатчика 4 1 минимальной токовой нагрузки, что приводит к срабатываниюблока 40 сравнения и замыканиюуправляемого ключа 39. В результатев блок 34 памяти записывается выходной сигнал датчика 26 скороститягового двигателя 6 .После снижения токовой нагрузкив тяговом двигателе 6 до заданнойвеличины при которой избыточноескольжение (боксование) невозможно,выходной сигнал блока...
Датчик контроля режимов работы горных машин

Номер патента: 1700230
Опубликовано: 23.12.1991
Авторы: Виноград, Градова, Новик, Седро
МПК: E21C 35/24
Метки: горных, датчик, машин, работы, режимов
...зависит от предъявляемых к датчику требований по точности фиксации начала или конца рабочего режима комплекса. Чем больше разница, тем ниже точность фиксации момента начала или конца рабочего режима, В то же время, согласно экспериментальным данным, полученным в процессе опытной эксплуатации датчика, пороговое значение тока должно быть больше тока на холостом ходу не менее чем на 10, что дает возможность устранить влияние изменения тока на холостом ходу в зависимости от посторонних факторов (пробуксовка комбайна, частичное затупление резцов режущего органа),На основании сказанного порядок работы датчика следующий. Преобразователь ток-напряжение 2, вход которого подключен к выходу трансформатора 1 тока, преобразует значение...
Система регулирования положения
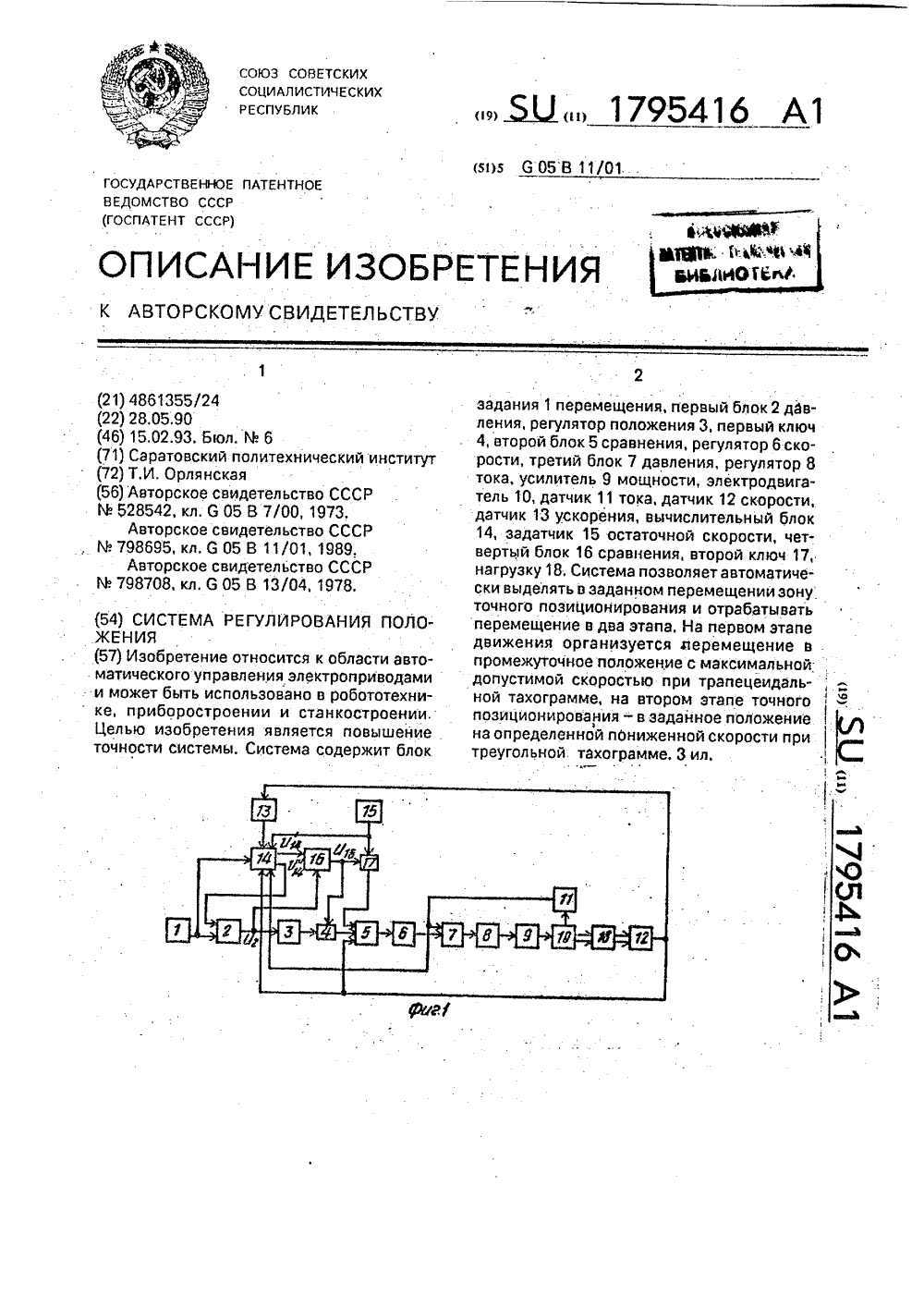
Номер патента: 1795416
Опубликовано: 15.02.1993
Автор: Орлянская
МПК: G05B 11/01
Метки: положения
...ускорение электродвигателя,Перемещение в зоне точного позиционирования Я 2 определяется выражением. где вост - средняя остановочная скорость.Значение средней остановочной скоро-. сти вос рассчитывается до настройки системы исходя иэ максимальной допустимой погрешности позиционирования ЬуЪах.доп, с учетом отклонения параметров системы согласно выражениюЖостгдеК 11 ЛЖвахйС + Ь йвах/1 с(ЮвахИср ) (твах 11 ср ) ,еср - среднее значение ускорения тор 10 можения,тср - среднее время срабатывания аппаратуры системы;асср - средний приведенный к валу дви-.гателя момент инерции;Мдин.ср - среднее значение динамического момента на валу электродвигателя;Ь ОЪах, Лвах Ь Мдин.ва - отклоненияпараметров электродвигателя от среднихзначений.20 В период...
Почвообрабатывающая машина

Номер патента: 1210683
Опубликовано: 15.02.1986
Авторы: Демидов, Зволинский, Панов
МПК: A01B 61/00
Метки: почвообрабатывающая
...схема почвообрабатывающей машины.Почвообрабатывающая машина содержит раму 1, гидросистему, включающую гидромотор 2, гидронасос 3, гидробак 4, цепную передачу 5, Датчики 6 и 7 частот вращения кинематически связаны соответственно с опорным колесом,8 ифрезбарабаном 9. Выходы датчиков 6 и 7 подключены к входам блока 10 сравнения частот вращения, выходы 11 и 12 которого соединен с входами электроуправляемого дросселя-регулятора 13; включенного последовательно с гидро- мотором 2 и гидронасосом 3 в нагнетательную магистраль 14, при этом выход предохранительного клапана 15 электроуправляемого дросселя-регулятора 13 соединен со сливной магистралью 16.Почвообрабатывающая машина работает следующим образом.При работе машины с номинальным...
Предыдущий патент: Способ автоматического управления забойной машиной и конвейером
Следующий патент: Способ разработки мощных крутых весьма сближенных угольных пластов, склонных к горным ударам и внезапным выбросам угля и газа
Случайный патент: Бунторазмотчик